Resurs texnologiyasida robotlardan foydalanish. Resurs robotlari: "Biz payvandchilarni ishdan bo'shatishga yordam beramiz"
Robotlardan foydalanish - avtomatlashtirishning universal usuli payvandlash texnologiyasi Faqat ketma-ketlikda emas, balki kichik hajmdagi ishlab chiqarishda ham emas, chunki mahsulotni o'zgartirganda, faqat bitta dasturni o'zgartirib, bitta robotdan foydalanish mumkin. Robotlar sizga monoton jismoniy mehnatni almashtirish, payvandlangan mahsulot sifatini oshirish, ishlab chiqarishni ko'paytirish imkonini beradi. Bir robot to'rt kishining mehnatini almashtirishi mumkin. Payvandlangan mahsulotlarni ishlab chiqarishda shunga e'tibor berish kerakki, robotlarni qarama-qarshilikka chidamli bo'g'inlar bilan payvandlash uchun ishlatish ancha oson elektr boshq manbai burchak va T-qo'shma va juda qiyin - elektr arqonlar bilan payvandlashning qo'shma bo'g'inlari uchun.
Robotlar mahsulotning ishlab chiqarish texnologiyasi uchun o'ziga xos talablarga ega: montajning barcha bo'shliqlarining yuqori aniqligi, pozitsiyaning barqarorligi payvand choki kosmik va yuqori sifatli payvandlash materiallari. Robotlardan foydalanish imkoniyati ularning ish hajmining o'lchamlari va shakli, joylashuvning aniqligi, harakat tezligi, asbob harakatchanlik darajalari, nazorat funktsiyalari bilan belgilanadi.
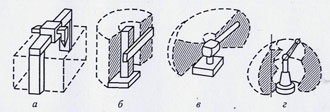
Kosmosga yo'naltirilmaydigan harakatlanuvchi ob'ektlar uchun uch darajali harakatchanlik etarli va to'liq mekansal yo'nalish uchun oltita. Payvand qilish uchun odatda besh darajali harakatga ega bo'lish zarur. Odatda, robotning asosiy mexanizmi uch daraja harakatlanishni ta'minlaydi va mexanik qurilma orqali yana ikki gradiya qo'shiladi - robot cho'tkasi, ishchi asbob biriktiriladi (payvandlash boshi, qarshilik manba pensesi yoki gaz to'sar). Robotning asosiy mexanizmi to'rtburchak (kartezyen), silindrsimon, sferik va burchak (antropomorfik) koordinata tizimlarida amalga oshirilishi mumkin (166-rasm). Asosiy mexanizmning koordinata tizimi robotning ish maydonining konstruktsiyasi va o'lchamlarini aniqlaydi, uning ichida ijro etuvchi organning harakatini boshqarish mumkin bo'ladi. To'rtburchak koordinata tizimi bilan ishlaydigan robot, o'lchamlari robotning o'lchamidan kichikroq bo'lgan to'rtburchaklar parallelepiped shaklida ishlaydigan joyga ega (Fig. 167, a). Silindrsimon (167, b) va sferik (167, s) koordinatali tizimlar bilan ishlaydigan robotlar manipulyatorning bazasi nisbatan kichik bo'lgan maydoni bilan ko'proq volumetrik maydonga ega. Antropomorfik koordinatalar tizimida ishlaydigan robotlar - bu sohaga yaqinroq ishlaydigan joy (Robiya 167, d).
Shakl. 166. Robotlarning asosiy mexanizmlarining asosiy sxemasi
Shakl. 167. To'rtburchak (a), silindrsimon (b), sferik (s) va antropomorfik (d) koordinatali tizimlar bilan ishlaydigan robotlarning ish maydoni
Barcha turdagi robotlar statsionar yoki ko'chma yoki salkam ra'ylar bo'ylab harakatlanishi mumkin. Robotlarning asosiy mexanizmlari tuzilishining asosiy qismida modulli printsip qabul qilindi. Har bir modul bir tomonlama harakatga ega. Robotiklarning umumiy tizimi to'rtburchaklar va aylanish harakatlariga ega bo'lgan standart bloklardan kerakli miqdordagi erkinlik darajasiga ega optimal sanoat robotini yig'ishga imkon beradi. (168-rasm). Boshqa maqsadlar uchun osonlikcha ishlatilishi mumkin bo'lgan oddiy modul elementlardan foydalanib, tizimning ko'p o'lchovli va moslashuvchanligi oshiriladi.
Robotlar gidravlik, pnevmatik va elektromekanik drayverlardan foydalanadi. Pnevmatik aktuator tizimli ravishda sodda, ammo foydalanilganda asbobning kerakli harakati (aylanish burchagi, zarba uzunligi) faqat to'xtash joylarini almashtirish orqali o'rnatiladi. har bir harakat darajasi uchun faqat ikki pozitsiya mavjud. Shlangi haydovchi ixchamdir va asbobni yuqori aniqlik bilan boshqarish imkonini beradi. Elektr chalg'igan kompleks tirnashsiz qutilarini ishlatishni talab qiladi, ammo uni saqlab qolish oson va yuqori ish faoliyatini va aniqligini ta'minlaydi. Ushbu turdagi haydovchi odatda robotlarni payvandlashda ishlatiladi. Pnevmatik aktuator sanoat robotlarida ehtiyot qismlarni yig'ish, yuklash va tushirish, tashish va saqlash vaqtida ishlatiladi.
Payvandlash va gazni kesish uchun Evropa sanoat korxonalarida lineer va aylanadigan modullardan tashqari, oltita erkinlik darajali robotlar turli dizayn ko'rinishida ishlatilgan (16-rasm). Katta metall konstruktsiyalarni himoya qiluvchi gaz muhitida payvandlash uchun portalnik tipidagi robotlar, o'lchovlarning ± 0.35 mm aniqligi bilan Karteziya koordinatali tizimida qo'llaniladi. "Horizontal-80" (Frantsiya) robotining gidravlik apparati, silindrli koordinatalari, aniqligi ± 0,3 mm. «Jolly-80» (Italiya) robotining elektr haydovchisi bilan jihozlangan, koordinatalari silindrsimon bo'lib, aniqligi ± 0,5 mm. 6CH (AQSh) robotining antropomorfik koordinatalar tizimida ishlab chiqarilgan, aniqligi ± 1,27 mm bo'lgan Shlangi qo'mondon tizimi mavjud. "Polar-6000" robot (Italiya) ± 1 mm aniqlikdagi sferik koordinatalar tizimida ishlaydigan gidravlik disk bilan jihozlangan.
Robot asbobining harakatlanishni boshqarish tizimlari sikli, joylashuv va konturga bo'linadi.
Velosiped tizimi eng oddiy, chunki ikkita lavozim odatda dasturlashtiriladi: asbob harakatining boshi va oxiri. Tik davriy robotlarda pnevmatik aktuatorlar keng qo'llaniladi.
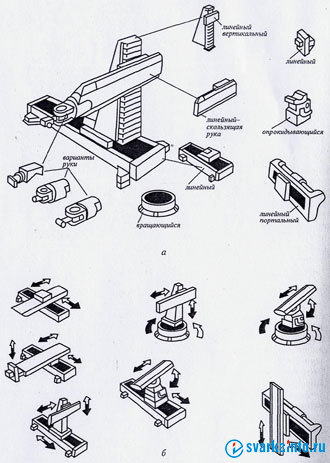
Shakl. 168. Aggregatli payvandlash robotlarini joylashtirish tizimi:
a - odatda bloklari va ularning joylashuvi robot; b - turli xil erkinlik darajasiga ega bo'lgan bloklar kombinatsiyasi namunalari
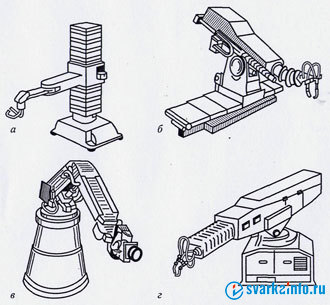
Shakl. Olti graduslik erkinlikdagi robotlar dizaynlari:
a - "Gorizontal-80" (Frantsiya); b- "Jolly 80" (Italiya); ichakchasidagi 6CH (AQSh); g - "Polar-6000" (Italiya)
Joylashuvni boshqarish tizimi buyruqlar ketma-ketligini emas, balki robotning barcha yo'nalishlarini ham joylashtiradi, u ko'p sonli joylashishni aniqlash nuqtalari bilan murakkab manipulatsiyalarni ta'minlash uchun ishlatiladi. Bunday holda, alohida nuqtalar orasidagi jamoa yo'llari nazorat qilinmaydi va ushbu nuqtalarni bog'lovchi to'g'ri chiziqdan ajralishi mumkin. Biroq, har bir nuqtada harakat yakunlanishi ma'lum bir aniqlik bilan ta'minlanadi. Har bir harakatning oxirida (har bir nuqtada) asbobni to'xtatish imkonini beradigan bo'lsa, tizim mono-pozitsiya deb ataladi. Bunday tizim qarshilikli spotli payvandlash, montaj va transport operatsiyalari uchun javob beradi.
Ko'p manzil nazorat qilish tizimi istalgan tezlikni ushlab turganda to'xtab qolmasdan qidiruv nuqtalarining o'tishini ta'minlaydi. Ushbu oraliq nuqtalar etarli darajada chastotali bo'lsa, bunday boshqarish tizimi asbobni oldindan belgilangan yo'l bo'ylab harakatlanishini ta'minlaydi va shuning uchun boshq manbai uchun ishlatilishi mumkin. Biroq, bu holda, dasturni robotning xotirasiga kiritish vaqtni sezilarli darajada sarflashni talab qiladi.
Konturni nazorat qilish tizimi harakatni uzluksiz traektoriya yoki kontur shaklida o'rnatadi va har bir vaqtning o'zida faqat manipulyatorning bog'lanish nuqtalarini emas, balki asbobning harakat tezligi vektorini belgilaydi. Ushbu tizim traektoriyalarning ikki yoki uch nuqtasini aniqlab, to'g'ri chiziq yoki aylanada jamoa harakatini ta'minlaydi. Bu robotni tayyorlashni juda osonlashtiradi, chunki traektoriyaning alohida bo'limlari aylana chiziqlari va tekis chiziqli segmentlar orqali interpolyatsiya qilinishi mumkin. Konturlangan robotlar boshq manbalariga va termal kesish.
Arkni payvandlash operatsiyalarini bajarish dasturi odatda robotning xotirasiga operator tomonidan o'rganish rejimida kiritiladi. Operator doimo oldindan aniqlangan nazorat nuqtalariga olib keladi va ularning koordinatalarini nazorat qilish tizimiga kiradi va ular orasidagi yo'lni ko'rsatadi: tekis chiziq yoki yoy. Shu bilan birga, chiroq tezligi va payvandlash rejimining boshqa parametrlari tizim xotirasida saqlanadi. Seriyali ishlab chiqarish bilan robot dastlabki payvandlash moslamasida o'qitiladi.
Kichkina ishlab chiqarish sharoitida, bir qator nodlardan ikkinchisiga o'tish vaqtida o'lchovlarning chetga chiqishlari sezilarli bo'lib chiqishi mumkin, shuning uchun siz seriyalarning har bir tugunini qayta dasturlashingiz kerak. Bunday sharoitda robotlarni turli xil ta'lim usuli bilan foydalaning. Operator mash'alaga maxsus uchini qo'yadi va qo'lni mash'alka qismidagi qismlarga tegizib, mash'alni mashinka bo'ylab harakat qiladi. Sensordan uchining harakatini belgilab qo'yadigan signallar nazorat qilish tizimiga ma'lum masofadan bir-birining orasidagi koordinatalar shaklida kiritiladi. Robotning o'qitish muddati payvandlash vaqtidan ancha past bo'lib, mahsulotning har bir nusxasida alohida dasturni amalga oshirish imkonini beradi. Ushbu turdagi ta'lim robotlari katta o'lchamli qatlamli tuzilmalarda yoki mahsulotlarning tez-tez o'zgarishi bilan uzoq bo'g'inlarni payvandlashda ishlatiladi. Bu holatda, tikuvlar burchakka, T shaklida yoki keskin bir oluk bilan biriktirib qo'yilgan bo'lishi kerak, shunda uchish mashqda qo'shma qism bo'ylab harakatlanadi.
Ishlab chiqarish roboti odatda asboblar manipulyatoridir. Maqsadga ko'ra, robotning qo'lida bir tutma qurilmasi, payvandlash manbai uchun payvandlash pensesi, himoya gazlarda boshq manbai, termal kesish uchun kesish mash'alani va boshqalar belgilanadi.
Qoplama asboblari texnologik operatsiyalar jarayonida ehtiyot qismlar yoki asboblarni ushlab turish va joylashtirish uchun ishlatiladi. Faoliyat printsipiga ko'ra ular mexanik, vakuum, magnit, elastik qoplama va hokazo bo'lishi mumkin. Tekshiriluvchi mexanik tortish moslamalari moslamaning moslashuvchan xususiyatlariga bog'liq bo'lgan siqish-qo'ziqorinli pinjaklar, barmoqli barmoqlar va burmalar shaklida, ma'lumotlar. Bunday ushlashlar kichik massa ob'ektlarini boshqarishda ishlatiladi. Ob'ektni maxsus pullers yordamida ozod qilish. Keyinchalik tez-tez ishlatiladigan buyruqlar mexanik tortish moslamalari. Siqish jaglarining harakati pnevmatik aktuatordan transmisyon mexanizmlari (qo'l, rack, xanjar) orqali ta'minlanadi. Buning uchun piston yoki diafragma vositalarini ishlating (170-rasm, d). Ko'p tomonlama magnit va vakuumli tutqichlar.
Elastik qoplaydigan tutqichlar nozik mahsulotlar ishlab chiqarishda qo'llaniladi. Siqilgan havo korpusda / xonada 2 teshik orqali ta'minlanganida, u siqilgan va mahsulotni ushlab turadi (171, i). Mahsulot ichki yuzaning orqasida ushlab turilsa, elastik xonani tashqarida ishlab chiqaradi. Elastik egiluvchi xonalari bo'lgan tutqich (171, b) moslashuvchan tanaga ega bo'lib, uning ustiga 3 va 2-gachasi bir prizma o'rnatilgan bo'lib, gofralarning assimetrik joylashuvi bosimli havo berilganda kameralar bükülmesine olib keladi va qismini prizma ustiga bosib qiladi. Bu nozik asosga ega qismlarni yumshoq tutqich bilan kerakli kombinatsiyaga etadi.
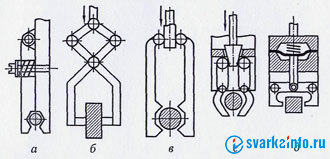
Shakl. 170. Shomil kabi tutqichlarni mexanizmlari diagrammasi:
a - buloq; b - tarmog'i; raf va pinion; g - krinleryazhny; d - qo'l diafragma

Shakl. 171. Tutqichlarni moslashuvchan qoplash sxemalari:
a - ichki kengayadigan kameraga ega; b - egri chiziqlar bilan;
1 - ish; 2 - kamera; 3 - prizma
Tutqazadigan qurilmalar odatda kontakt detallari, slip va kuch-quvvat sezgichlari, ultrasonik va optik sezgichlar va boshqalarni ta'minlaydi. Bu sizga jag'lar va tutqich tashqarisidagi narsalarni aniqlash imkonini beradi.
Jihozlarni ishlab chiqarishda va yig'ilishlarni yig'ishda umumiy xatolar, qurilmadagi burilishlar, robot qo'lining joylashuvidagi xatolar noto'g'ri o'rnatishlarga olib kelishi mumkin payvand choki. Shuning uchun, payvandlashning bosh qismini parchalanib ketish chizig'i bo'ylab va mash'aladan mahsulotga doimiy masofani ta'minlab berish uchun, ish printsipi jihatidan farq qiladigan payvandlash moslamasining turli xil pozitsion sensorlar qo'llaniladi. Resurs chizig'ini aniqlash uslubiga ko'ra, sensorlar kontaktlarga va kontaktsiz bo'linadi. Kontakt detallari (172-rasm) qo'shni uchastkasi to'g'risidagi ma'lumotni burmali qirralarning yoki chetidan burama silindrli chiziqdan foydalanib olib tashlang. Nusxa ko'chirish tsilindrli kontakt detallari mash'alni to'g'ri yo'nalishda harakatlantirish uchun nazorat mexanik uskuna yordamida qaynoq mash'alasiga qattiq yoki moslashuvchan ulanishi mumkin. Pnevmatik va elektromekanik sensorlar nusxa ko'chirish elementini o'z ichiga oladi - pnevmatik tsilindrlarni, kamon yoki o'z og'irligi ta'sirida nusxa ko'chirish yuzasiga nisbatan 1 ... 10 N gacha kuchga ega bo'lgan prob. Nusxa olish manba nuqtasi oldida yoki uning yon tomonida amalga oshiriladi. Mexanik signalni elektrga aylantirish elektrokontakt, fotoelektr, rezistor yoki differentsial transformator konvertorlari orqali amalga oshiriladi. Barcha problar manba mash'alasi bilan bloklanadi.
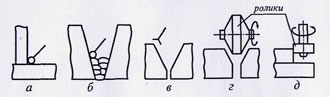
Shakl. 172. Payvandlash apparatlarining aloqa pozitsiyasi sensori:
a, b, c - problar; g, d - nusxa ko'chirish tsilindrni
Televizor sensorlari televizor, fotoelektr, indüktif, pnevmatik va boshqalarni o'z ichiga oladi. Televizor sensorlari o'zlarining nurli yoritgichlari (o'zaro bog'liqlik liniyasi, nusxa ko'chirish chizig'i yoki xavfi, nusxa ko'chirish liniyasi, bo'shliq) bilan yoritilgan kontrastli qirralar yoki chiziqlar mavjudligida payvandlash mash'alasining harakati to'g'risida ma'lumot olishadi. Ular payvandlash qo'shimchasining joylashuvi va geometrik parametrlari to'g'risida juda ko'p ma'lumot beradi, ular zamonaviy va istiqbolli. Fotoelektrik sezgichlardan foydalanish shartlari kontrastli chiziqlardagi ma'lumotlarni o'qiganligi uchun televizor sensorlari bilan o'xshash.
Elektromagnit sensorlar sensorning o'zi yaratgan magnit maydon parametrlarining o'zgarishi natijasida mahsulotning qo'shilishi yoki yuzasi to'g'risida ma'lumot oladilar.
Pnevmatik jet sezgichlari mahsulotning sirtiga gaz oqayotganida chiqish nozulidagi bosim o'zgarishi tamoyili asosida ishlaydi: ko'krak yuzasiga yaqinroq bo'lsa bosim kattaroq bo'ladi. Payvand chokini payvand qilish uchun monokromatik lazerli nurlanish yordamida payvandlash to'g'risida ko'p ma'lumot olish mumkin. Brakka o'rnatilgan sensorning bir burchagida 200 ga yaqin o'lchovlar olinadi, bu esa payvand atrofidagi payvand chokining to'liq uch o'lchovli modelini beradi. Sensorlarning umumiy ahvolini ko'rib chiqish elektrod simining oxirigacha egiluvchanligi yoki elektr quvvati uzilishiga bog'liqligini nazorat qilmaslikdir. Shuning uchun sensor sifatida ishlatiladigan yanada istiqbolli tizim payvand choki yoki to'g'ridan to'g'ri payvandlash nuqtasida axborot olish imkonini beruvchi elektrod. Axborotni yodlash va payvandlash mash'allari bilan bog'langan kuzatuv tizimlarini yaratishning hojati yo'q.
Robotik texnologik komplekslar (RTC) robotlar, joylar yoki chiziqlar bilan jihozlangan ish joylari deb ataladi. RTKning tuzilishi mahsulotning xarakteriga va uning chiqarilishining seriyaliligiga bog'liq: RTK kiti odatda payvandlash vositasini harakatga keltiruvchi robotni va barcha seamlarini manba qilishni qulay bo'lgan mekansal holatga keltiradigan mahsulot manipulyatorini o'z ichiga oladi.
Mahsulot manipulyatori robotning harakatlanish darajasini to'ldirgandek, u bilan birgalikda bitta dastur asosida ishlaydi va shu tizimdan nazorat qilinadi. Payvandlangan mahsulotlarning ko'plab tarkibiy shakllari payvandlash jarayonida murakkab manipulyatsiyaga muhtojdir, bu odatda standart payvandlash rotatorlari yordamida amalga oshirilmaydi. Shuning uchun RTKni loyihalashda modulli manipulyatorlar dizayni qo'llaniladi. Eng oddiy modullar (173-rasm) mahsulotning gorizontal va vertikal o'qga nisbatan aylanishini ta'minlaydi. B-patnisidagi modullarni o'rnatish mahsulotni montaj holatidan payvandlash holatiga o'tkazishga imkon beradigan ikki-o'lchovli manipulyator d hosil qiladi. Moduli o'rnatilganida ikki tomonlama manipulyator ishlab chiqariladi, bu mahsulotni gorizontaldan vertikal holatga aylantirish imkonini beradi. G grafigining yuzasiga joylashtirish mexanizmlari bilan gorizontal g o'rnatilishi nafaqat qo'shimcha harakat darajasini olish imkonini beradi, balki manipulyatorda katta o'lchamdagi mahsulotlarni aniqlash imkoniyatini yaratadi. Manipulyatorning sirt panellarida texnologik jarayonning (montaj, payvandlash) xarakteriga qarab, payvandlanadigan mahsulotni biriktirish uchun yig'uvchi qurilma yoki qurilma o'rnatiladi.
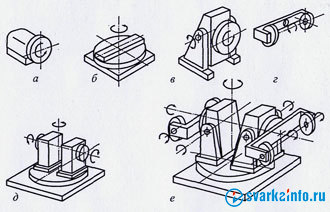
Shakl. Manipulyatorlarni joylashtirishning modulli printsipi:
va - gorizontal aylanishli modul; b - vertikal aylanishli modul; - ikkita qismli manipulyator; g - surma; d - a va b modullarining joylashishi; E-modullarning murakkab manipulyatori
Robotlashtirilgan texnologik kompleks, misol uchun, avtomatik gaz payvandlash portali uchun sarflanadigan elektrod bilan himoya gazlar aralashmasi va ikki martali manipulyator bilan o'rnatilgan robotlardan iborat bo'lishi mumkin. Manipulyatorning o'ng holatida payvandlash jarayoni amalga oshirilganda yangi yig'ilgan mahsulot o'rnatiladi va uning chap tomonida saqlanadi. Resurs tugaganidan so'ng robot manipulyatorning chap holatiga o'tadi va o'ng holatida mahsulot almashtiriladi. Ushbu manipulyator qaytib taglikka o'rnatilgan bo'lsa (shakl 173, e), robotni tashish ehtiyoji yo'qoladi va u doimiy ravishda o'rnatilishi mumkin.
RTK dan foydalanilganda xodimlar uchun xavfsizlik choralarini ta'minlaydi. Favqulodda vaziyatlar robotning ishlashi va o'qitish vaqtida harakatsiz harakatlaridan kelib chiqishi mumkin. Shuning uchun, har bir holatda, agar odam ish joyiga kirsa robotni to'xtatish kerak. Robotni aloqa, kuch, ultratovush, induktsiya, radar va boshqa sensorlarga asoslangan himoya vositalarini bajarishni o'chiring.
Avtomatik payvandlash ko'pincha tegishli texnologik tizimga integratsiyalangan sanoat robotlari yordamida tashkil etiladi.
Ishlab chiqarish robotlari dasturiy ta'minotni aniqlaydigan traektoriyalarni ishlab chiqarishga mo'ljallangan mashinalardir. Resurs robot barcha asosiy texnologiyalarni ishlab chiqarish uchun to'liq jihozlangan: elektr arqoni, nuqta aloqa, plazma chiqib ketish va hokazo. Standart yondashuvda sanoat robot ikkita bog'langan metall qismlardan o'tuvchi asbobni ushlab turadi, robot esa, chiziqli o'zgarishlardan tashqari, salınımlı dasturiy ta'minot qiymatlari dasturlashtirilgan tikani hosil qilish uchun zarur bo'lgan harakatlar.
Robotli payvandlash jarayonida robot payvandlash moslamasini oldindan belgilangan traektoriya bo'ylab harakatlantirib, texnologik parametrlarni nazorat qiladi va ularning o'zgarishiga javob beradi, juda yuqori aniqlik va barqaror (optimal) tezlik bilan harakat qiladi.
Robotning qo'shimcha elementlari ish qismiga aylanish harakati o'rnatuvchi pozitsionerlar bo'lib, siz robotning ish maydonini ko'paytiradigan va bir robot yordamida bir nechta payvandlash stantsiyalarini tashkil etishga yoki yirik o'lchamdagi qismlar va tuzilmalarni ishlab chiqarishga imkon beradigan uzunlamasına harakatlar yordamida robotli payvandlashni amalga oshirishga imkon beradi.
Bundan tashqari, robot tizimlarining tarkibida bir vaqtning o'zida ishlaydigan bir nechta robotlar ham bo'lishi mumkin. Biroq, ular i pozisyoner sifatida xizmat qilishi mumkin. ish qismlarini yoki asosiy texnologik asboblarni manipulyatsiya qilish. payvandlashni amalga oshiring.
Eng keng tarqalgan zamonaviy sanoat payvandlash robotlari Avtomobil sanoatiga kirishdi. Bu ajablanarli emas, chunki jismlarning ishlab chiqarilishi yuqori sifat va ishlash talab qiladi. Biroq, robot manbaini qo'llash avtomobil ishlab chiqaruvchilardan emas, Korxonaning hosildorlik va sifatni oshirishga qodir bo'lgan barcha joylarda, ayni vaqtda, malakali ishchilarga bo'lgan qaramligini optimallashtirish yoki yaqin kelajakda payvandlash RTKlarni joriy etish talab qilinadi. Bundan tashqari, zamonaviy robotlar rus xaridorlari uchun narx va soddalashtirilgan interfeysga ega bo'ldi.
Dunyoda ishlab chiqarilgan sanoat robotlarning uchdan biri payvandlash robotlari hisoblanadi. Nima uchun? Birinchi mexanizatsiyalash va avtomatlashtirish payvandlash ishlab chiqarish katta hajmdagi kompleks montajni talab qiluvchi avtomobil sanoati rivojlangan, shuning uchun avto fabrikalarida payvandlash robotlari keng qo'llaniladi. Biroq, robotlar to'xtamaydi. Bugungi kunda u har qanday sanoat va korxonalar uchun echimlar taklif qiladi. Hatto eng kichik ishlab chiqarish payvandlashni avtomatlashtirishga ham ehtiyoj sezadi. Agar menejer ketma-ket ishlab chiqarishga, korxonaning yuqori hajmiga va muhim ish hajmiga ega bo'lsa, u holda robotlarni payvandlash uning uchun dolzarb va samarali bo'ladi. Kichik otomatika deb ataladigan ishlar ish oqimini sezilarli darajada optimallashtirish mumkin. Robotik komplekslarning bir qismi bo'lgan robotlarning payvandlashi samaradorligi uchta ustunga asoslangan: ketma-ketlik, moslashuvchanlik va joylashish tezligi.
Ishlab chiqaruvchiga nima beradi, payvandlashni avtomatlashtirish kerakmi?
Yuqori samaradorlik. Uzoq va chiziqli chiziqli payvand choklar ustida ishlaganda payvandlash manbalari robotlari ikki barobar tezroq bo'lishi mumkin. Ya'ni, samaradorlik, ya'ni yaxshi ishlash va nol rad etish darajasi.
Ruxsat etilgan va rejalashtirilgan ishlab chiqarish hajmi. Resurs robotlari kompaniya boshqaruvini biznes jarayonlarini yanada samarali boshqarishga imkon beradi.
Harakat erkinligi. Payvandlash ishlarini mexanizatsiyalash va avtomatlashtirish qisqa vaqt ichida ishlab chiqarishni to'xtatib, ishlab chiqarishni boshlashga imkon beradi. Ish vaqti kamayadi. Eng so'nggi naslning arqon va boshqa turdagi payvandlash usullari uchun robotlar ularni darhol vazifalarni hal qilish uchun osongina qayta programlanadigan tarzda ishlab chiqilgan.
Tez qayta to'lov. Ishda kiritilgan payvandlash otomatizatsiyasi olti oy yoki bir yil davomida o'z-o'zidan to'lashi mumkin.
Resurs robotlari - 25 yil xizmat muddati!
Tabiiyki, xodimlar ishlash qoidalariga amal qilishlari kerak va kompleks o'z vaqtida o'tishi kerak texnik xizmat ko'rsatish (odatda har 15000 soat ishlashgan).

Quyidagilardan iborat komplekslarni yaratamiz:
- Barcha asosiy payvandlash turlari: MIG \\ MAG, TIG, WIG, oqim manbai, lazer, plazma, aloqa, ishqalanish, tandem va boshqalar. Arkni payvandlash robotlari eng an'anaviy hisoblanadi, ammo har qanday payvandlash uchun robotizatsiya mavjud.
- O'rnatish va payvandlash uskunalari va o'z ishlab chiqaruvchilari. Odatda, payvandlashni avtomatlashtirish maxsus uskunalarni ishlab chiqarishni o'z ichiga oladi. Aslida, payvandlash uchun robotning samaradorligi asbobga bog'liq. Qo'l va avtomatik bo'lishi mumkin (ya'ni, bir xil robotik). Shuni ta'kidlash kerakki, avtotransport vositalari bilan bo'shliqlarni joylashtirish taqiqlanadi. Shuning uchun, ishlov beriladigan qism yuqori aniqlik bilan bajarilishi kerak. Shu bilan birga, avtomatik ishlov berish jarayoni yanada samarali qo'llanma.
- Alohida mo'ljallangan elementlar: ustunlar, chiziqli ko'rsatmalar, yuqori o'rinli joylashtiruvchilar, konveyerlar va hk .; Payvandlashni avtomatlashtirish joylashtirish moslamalarini yuqori sifatli ishlashni nazarda tutadi. Keyin yuqori, bir soniyada bir necha metr, brusok o'rtasida harakat tezligi payvandlash payi. Ushbu tezlik tufayli ishlab chiqarish jarayoni ham kamayadi. Positioners va lineer qo'llanmalar payvandlash robotlari ish joyini kengaytiradi. Ularning yordami bilan siz bir nechta payvandlash stantsiyalarini bitta robot yordamida jihozlashingiz mumkin. Katta qismlarni payvandlashda ko'rsatmalar ham kerak.
- Payvandlangan bo'g'inlar va mahsulotlarni ishlab chiqarish va yig'ishda texnologik xatolarni hisobga olish imkonini beruvchi passiv va faol qidirish, tahlil qilish va kuzatish tizimlari. Biz asosan lazer yoki infraqizil radiatsiyaga asoslangan kontaktli bo'lmagan kuzatuv tizimlaridan foydalanamiz.
- Robotli payvandlash texnologiyasi. Payvandlash avtomatlashtirilganda maxsus mahsulotni ishlab chiqarish uchun foydalaniladigan texnologiyaga maxsus talablar qo'yiladi. Avvalo, bu barcha ish qismlarining eng yuqori aniqligi, payvand chokining barqaror pozitsiyasi va payvandlashda ishlatiladigan materiallarning yaxshi sifati. Bizning texnologiya muhandislari ishlab chiqarishda zarur bo'lgan payvandlash modellari mavjud standartlarga va manipulyatorlar ta'minotiga asoslangan alohida bir payvandlash texnologiyasini ishlab chiqadi.
Shuningdek, biz mijozlarni payvandlashni mexanizatsiyalash va avtomatlashtirishning barcha bosqichlarida qo'llab-quvvatlaymiz.

TechnoMatics MChJ faqat vaqt sinovidan o'tgan ishlab chiqaruvchilar, jumladan, SCHMALZ, Schunk, ESAB, META, AMF, Demmak, KEMPPI, Fronius, Lincoln Electric, EWM, Havo suvi, Servorobot, IPG Fotonics, Precitec va boshqalar bilan ishlaydi. Kompaniyamizda buyurtma berish: biz nafaqat jihozlarni o'rnatamiz, balki xodimlarni o'qitamiz
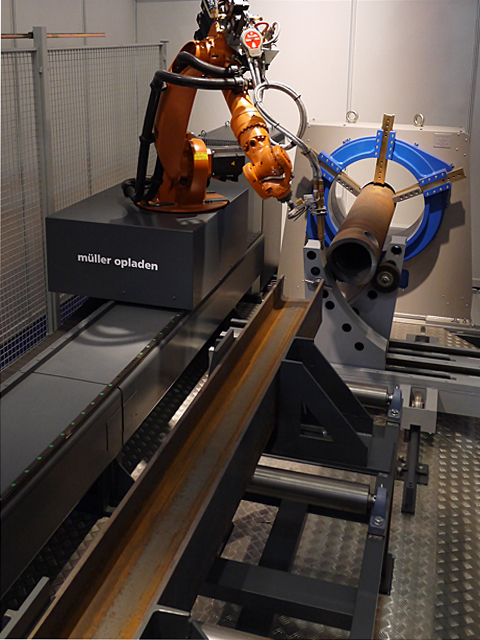
Robotlar quydagi manba turlarida foydalanish mumkin: MIG / MAG payvandlash, WIG payvandlash, plazma chiqib ketish, gibrid lazerli payvandlash, qarshilik manbai va spotli payvandlash. Barcha turdagi payvandlash uchun bitta robotdan foydalanish qobiliyati. Bir joyda bir nechta robotlardan va bitta boshqaruv kabinetidan foydalanish qobiliyati. Robotlardan foydalanish tor joylarda payvandlash jarayoniga imkon beradi.
81-rasm - Resurs robotining ko'rinishi
Robotlardan foydalanishning afzalliklari:
Yuqori tezlik va joylashishni aniqlash tezligi;
Avtotransportda konveyerlarda foydalanish uchun ideal devor va shipga osongina o'rnatilgan;
Katta sharoitda va katta ish qismlari bilan ishlash uchun payvandlash va kesish uchun ideal;
MIG / MAG manbaiga, WIG manbaiga, plazma kesishga, gibrid lazerli manbaga, qarshilik manbaiga va payvandlash manbaiga mos keladi.
Sanoat robot - raqamli dasturlarni boshqarish tizimi bilan jihozlangan avtomatik manipulyator. Manipulyatorlar uchun odatiy bo'lgan yuqori harakatga ega bo'lgan ijro etuvchi organlarning katta moslashuvchanligi va ularning vosita funktsiyalarini o'zgartirishning qulayligi birlashtiradi. Robotlar boshqarish jarayonida minimal inson ishtirokida turli ishlarni bajarish uchun mo'ljallangan. Ular uchta asosiy funktsional birlikni o'z ichiga olgan universal avtomatdir: ishchi organlar - "qo'llar", ularni nazorat qiluvchi kompyuter va robotga moslasha oladigan qobiliyat haqida atrof-muhit haqida ma'lumot to'plash qurilmalari.
Robotga asoslangan payvandlash majmuasi (45-rasm) payvandlash uskunalari, geometrik va texnologik moslashuv tizimlarini boshqarish asboblari va o'lchash asboblari. O'z navbatida manipulyatsiya tizimi payvandlash apparati (payvandlash mash'alasi) uchun manipulyator va manba qilinadigan mahsulot uchun manipulyatordan iborat. Bitta robot-texnologiya majmui tarkibida asbob va (yoki) mahsulot uchun bir nechta manipulyatorlar bo'lishi mumkin. Moslashuv tizimining o'lchash apparatlari brusher yoki mahsulotga nisbatan belgilanishi mumkin yoki uni boshqarish tizimining qo'shimcha yo'nalishlari bilan harakatlanishi mumkin.

Shakl 82 - Robotik payvandlash tizimining tarkibi
Jamoa manipulyatori va mahsulot manipulyatori o'rtasidagi funktsiyalarni taqsimlash payvandlash vositasi va mahsulotning payvandlash usuli, mahsulotning o'lchami va vazni, payvandning shakli va joylashishi, payvandlash operatsiyalari va butun ishlab chiqarish jarayonlari bilan bog'liq bo'lgan nisbiy harakatlarini amalga oshirish uslubiga bog'liq.
Quyidagi usullar robotni boshqarish tizimi tomonidan payvandlash apparati va mahsulotining nisbatan harakatini amalga oshirish mumkin:
· Mahsulot butun ish paytida kosmosda yo'nalishini o'zgartirmaydi (statsionar bo'lib qoladi yoki konveyerda teng ravishda harakatlanadi) va payvandlash apparati payvandlash uchun kerak bo'lgan barcha harakatlarni bajaradi. Ushbu uslub har qanday to'siqlarga asbobning manipulyatoriga kirganda yoki mahsulotni qiyinlashtiradigan (misol uchun, nuqta bilan) qarshilik manbai avtomobil tanalari);
· Mahsulot muntazam ravishda tovush yoki joylashtirgich shaklida ishlab chiqarilgan mahsulotni manipulyator yordamida kosmosga yo'naltirishni o'zgartiradi, lekin birma-bir payvandlash o'tishlari vaqtinchalik saqlanib qoladi va payvandlash apparati payvandlash uchun zarur bo'lgan barcha harakatlarni amalga oshiradi (u joyni qayta o'rnatishda mahsulotni almashtirishni hisobga olgan holda). Ushbu usul mahsulotga davriy qayta yo'naltirish zarur va etarli bo'lgan hollarda qo'llaniladi; Hozirgi kunda dvigatellarni payvandlash operatsiyalarini robotlashtirishda eng keng tarqalgan.
· Mahsulot va payvandlash moslamasi doimiy ravishda harakatga keltirilib, manba moslamasining aloqa liniyalari bo'ylab harakatlanishini ta'minlaydi va ma'lum bir (masalan, past) holatdagi tikuvning barcha nuqtalarida payvandlash zonasini saqlab turadi. Usul uskuna manipulyatori va mahsulot manipulyatorining o'zaro bog'liqligini tekshirishni o'z ichiga oladi. eng murakkab boshqaruv tizimi. Usul eng moslashuvchan manba sharoitlariga ruxsat berilsa, barcha joylarni maqbul (misol uchun pastroq) holatida payvandlash imkonini beruvchi kichik va o'rta o'lchamli mahsulotlarni murakkab shakldagi payvandlash uchun optimaldir;
· Mahsulot payvandlash uchun kerak bo'lgan barcha harakatlarni bajaradi va payvandlash moslamasi har doim o'rnatiladi. Umuman olganda, ushbu usul 5-6 darajadagi harakatga ega mahsulotni manipulyatoridan foydalanishni talab qiladi, ya'ni. sanoat robotini mahsulot manipulyatori sifatida ishlatish. Ushbu usulning chegaralanishi zamonaviy robotlarning yuk hajmi. Bu usul murakkab va og'ir yig'ish-payvandlash apparatlarida payvandlashda payvandlashni talab qilmaydigan kompakt shakldagi yetarlicha qattiq tuzilmalarni archli payvandlashda qo'llanadi. Bu bilan boshq manbai sobit sobit foydalanib, amalga oshiring payvandlash mashinasiva nuqta aloqasi - statsionar nuqta mashinasi yoki qattiq o'rnatiladigan payvand choklari yordamida. Ushbu uslubning afzalligi shundaki, xuddi shu sanoat robotni o'rnatish va tushirish operatsiyalari, shuningdek payvandlash va yordamchi harakatlarni amalga oshiradi.
Inshootni payvandlanadigan strukturaning taqdim etilishi (ma'lum tuzilmalar tarkibida) insonning aralashuvisiz ideal dizaynerlik manbaiga ega robot-texnologiya kompleksi tikuv ketma-ketligini tanlab, payvandlash vositasi va mahsulotining kerakli nisbatan harakatlari dasturini ishlab chiqishi kerak, shuningdek, payvandlash jarayonining parametrlari o'zgarishini, mahsulotning har bir qismining ish maydoni va ulanishning haqiqiy geometrik parametrlari (bo'shliq, kesish uchastkasi va boshqalar), manba gotovlennogo. Biroq iste'molchilar uchun hozirgi mavjud bo'lgan payvandlash robot-texnologik komplekslari payvandlash tartibini tanlay olmaydi va ish dasturining batafsil sozlanishini talab qila olmaydi. Faqat robotning ba'zi modellari aniq, sodda moslashuv vazifalarini (ya'ni, joy almashtirish dasturini va dastur parametrlarini payvandlash uchun tayyorlangan ulanishning geometrik parametrlarini tasodifiy og'ishlarni bartaraf etish uchun rejimni parametrlarini o'zgartirish dasturini o'zgartirishi mumkin) bajarishi mumkin. Bularning barchasi boshq manba uchun robotlarning ko'lamini sezilarli darajada qisqartiradi.
Zamonaviy robotexnologiya majmualarida adaptatsiya tizimining (avvalambor, mahsulot haqida ma'lumotni qabul qilish kerak bo'ladigan qismi) nomukammalligi insonni (operatorni) batafsil payvandlash dasturini yaratishdagi ishtiroki bilan qoplanadi. Ammo bunday soddalashtirilgan robotexnologiya majmualarida ham robotexnagral kompleks tarkibiy qismlarining barcha elementlari va murakkab kompleksni nazorat qilish uchun ishlab chiqilgan tizimning mavjudligi to'g'risida ma'lumot olishning keng qamrovli tizimi bilan murakkab texnik vositalarni qo'llash zarur.