Servo drive - ce este? Cum să faci și să conectezi servomotor cu propriile mâini? Ce face un servomotor și cum funcționează Servomotoare electrice.
Legătura porții este acționată de un servomotor sau „bătută în șuruburi”
- Blogul companiei Amperka
Salutare tuturor habraconstructorilor!
Mi-a venit în minte un gând necugetat: ia un dispozitiv care să poată fi folosit pentru a da un șurub. Doar de dragul de a demonstra servoacționarea robotului. Algoritmul este simplu: dăm o comandă să ridicăm ciocanul, să verificăm până se ridică și să eliberăm ciocanul; Și așa până când florile sunt sacrificate. Cum vă puteți da seama dacă ciocanul se mișcă sau dacă este înfundat fără a deteriora senzorii suplimentari? Porniți servomotor „proastă”! Cum să câștigi bani singur este disponibil din statistici.
Ce este un servomotor? Singur, știți totul, dar despre fiecare problemă: acesta este motivul pentru care, atunci când un motor staționar este înlocuit, fluxul nu se învârte pur și simplu în timp ce tensiunea este furnizată, ci se întoarce într-un anumit punct și se stabilește în acea poziție. Circuitul este instalat în spatele unui semnal PWM suplimentar. Servoacționarea taberei furioase este, de asemenea, vinovată de cunoașterea puterii sale. Înainte de a începe știuletul, am început să cred că ar fi mai simplu și mai eficient să hrănești recolta actuală din cutie. Nu asa. Să vorbim despre totul în ordine.
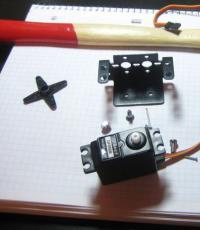
Ei bine, un accesoriu ghicitor: un servomotor cu un ciocan atașat pe un mic piedestal pentru aliniere. Servo drive-ul este conectat la Arduino prin IO Shield, iar microcontrolerul configurează algoritmul:
- Instalați servomotor pentru ridicarea ciocanului
- Nu acționați până când servomotor nu vă spune ce a fost realizat
- Porniți servomotor și lăsați ciocanul să cadă pe brațe
- Citiți textul în poziția corectă, ce a căzut
- Dacă firul nu s-a schimbat după ce a căzut de mai multe ori, înseamnă că firul a încetat să se înfunde. Aparent, vinul este înfundat - se presupune că
- Odată ce totul s-a schimbat, începem din nou

Taierea si rularea:

Să începem să scriem firmware pentru Arduino. Devine clar că instalarea unui kut cantat pentru servire nu este o problemă. Zocrema, care vă permite să creați o bibliotecă Servo standard, care formează un semnal PWM de ieșire din valoarea specificată în grade. Și principala problemă pentru cititori este: nu există funcții pentru asta.
Shvidko, după ce a căutat problema pe Google, a găsit o mulțime de informații pe forumuri, unde au confirmat cu autoritate: Acest lucru este imposibil! Unitățile servo sunt dispozitive numai pentru scriere.” Nu m-a deranjat, am simțit intuitiv că este pur și simplu posibil să obțin aceste date.
Matchasina
După câteva glume recente, puteți înțelege cum deține serverul. Acesta este motorul principal al unui flux constant, care este conectat la axul de ieșire printr-o atelă de roți dințate care formează treapta inferioară. Același ax din interior este atașat fizic la potențiometru (rezistor de reglare). Când motorul este pornit, axul se rotește, glisorul potențiometrului se rotește, tensiunea de ieșire a potențiometrului se modifică, tensiunea potențiometrului este citită și tensiunea a atins nivelul specificat - valoarea este atinsă, motorul se întoarce pe Id-ul vietii.Apoi, folosind un potențiometru, puteți determina tăierea curentului în spatele semnalului. Nu a mai fost posibil să porniți servomotor și să vă conectați la locația necesară. Să ne uităm la:

Vă spun imediat că am rupt irevocabil servomotor din fotografie în timpul procesului de analiză. Nu a fost nevoie să scoateți placa cu electronică, doar scoateți capacul din spate, care se potrivește pe 4 șuruburi. Nu a fost imediat evident și pentru a ne da seama unde era amplasat potențiometrul pe placa lipită, a trebuit să sacrificăm o unitate.
Axa ca potențiometru lipit pe servo-uri în DFRobot:

Avem nevoie de un semnal de la glisor care se schimbă între tensiunea minimă și cea maximă la întoarcere. Luăm un multimetru, întoarcem axul și vedem: ce circuite indică ce semnal. Pentru serviciul meu, o tensiune de 0,43 corespunde unei viraj de 0°, iar o tensiune de 2,56 V corespunde unei rotații maxime de 180°.
Lipiți cu grijă noul fir de semnal.

Îl conectăm la intrarea analogică A5 de pe Arduino. Închidem capacul. Scriem programul:
#include
Porniți-l, încercați, încercați!
Cu ce să lucrezi, fără alte prelungiri, există o mulțime de opțiuni: poți crea un controler pe baza a ceea ce este folosit pe nave pentru a seta tracțiunea (înapoi/înapoi); este posibil să se utilizeze servo-ul cu legătură poarta ca element al controlului kerma autonom al oricărei mașini; multe lucruri sunt posibile. Fie ca fantezia ta să vină cu noi!
Servoacționare(lat.servus - servitor, asistent; aduce, ce să cusă)- Conduceți de la Keruvan prin apel invers negativ , care vă permite să setați cu precizie parametrii roc.
Servo drive-ul este cel mai des folosit în robotică. Este imposibil să faci fără ea, mai ales când vine vorba de nivelul ridicat de precizie a mișcării obiectelor și obiectelor. Această problemă apare odată cu trecerea timpului cu distrugerea oricărui tip de lucru mecanic (pregătirea, fierberea, măcinarea, mutarea produselor pe un transportor etc.). Astfel de roboți ar trebui să aibă manipulatoare care arată ca niște mâini mecanice. Vlasna, celebra robotică industrială, care este folosită pentru automatizarea producției în întreaga lume, ne este prezentată în fața manipulatorilor. Și niciun astfel de manipulator nu se poate descurca fără servomotor, care sunt conectate între ele. De ce?
Totul din dreapta este controlat de servomotor. Un servomotor este o unitate în care este creată o legătură cu feedback negativ, care permite controlul precis al parametrilor arborelui de antrenare (cel mai adesea arborele de ieșire). Pentru a crea o astfel de poartă, trebuie să utilizați senzorul de poziție a lanternului de ieșire al servomotor sau senzorii de fluiditate, senzorii de zgomot, etc. pot fi, de asemenea, conectați. Se pare că se atârnă sau se întoarce în cântecul de poziție. Această poziție este instalată și „verificată” până când este găsită o comandă de schimbare a poziției. De exemplu, se trimite un semnal că arborele este instalat la poziția colțului de 90 de grade. Arborele se rotește în poziția sa și se ajustează până când sosește un semnal despre o nouă poziție. Astfel de posibilități afectează serios servomotorul motorului primar, care nu se poate întoarce continuu atâta timp cât i se aplică tensiune. Drept urmare, dacă un robot este echipat cu astfel de unități, se poate prăbuși ca o mână umană și poate distruge robotul care poate fi distrus.
Există o mulțime de tipuri diferite de servomotor în industrie.În acest articol, ne uităm la servo drive-urile electrice din industria generală. Pentru a spune simplu, astfel de servo-uri au un arbore care se înfășoară în jurul lor. Pentru simplitate, ne vom uita la dispozitivul unității SG-90 hobi-servo (Fig. 1), care este utilizat în mod activ pentru crearea modelelor inițiale de roboți și alte mecanisme care zboară sau zboară. Sistemul de acţionare hobi-servo, spre deosebire de cel industrial, are dimensiuni mai mici, dezvoltă mai puţină forţă, este protejat altfel şi, în principiu, este absolut identic cu omologul său industrial.
Malyunok 1
Dispozitivul pentru acţionarea hobi-servo este prezentat în mica 2. Acest depozit include un motor electric, o cutie de viteze cu un set de viteze, un potenţiometru (care schimbă funcţia senzorului de poziţie pentru legătura de retur), o placă electronică de control pentru motorul electric și o carcasă care găzduiește întreaga capacitate Pe ce mici indicații conduci, ce fel de servoacționare trebuie să trăiești și să urmezi? Este format din 3 fire: firul „plus”, firul „minus” și firul care trimite semnalul care îl controlează. Pe diferite modele de plite-servo, darts pot avea culori diferite. Este practic să efectuați mai întâi viața „plus” a culorilor roșii și să efectuați viața „minus” pentru cele negre. Nu există standarde clare de culoare pentru dartul de semnal (pentru transmiterea semnalului de culoare). Pentru unele servomotoare, firul de semnal poate fi alb, portocaliu sau maro.

Malyunok 2
Pentru keruvannya astfel de motoare au adoptat standardul de semnal keruyuchy. Constă din impulsuri repetate în mod constant și, după cum spunem, impulsuri scăzute (Fig. 3). Frecvența acestor impulsuri devine treptat constantă și devine 50 Hz. Ieși afară, cât e ceasul?impulsuri (ora dintre marginile de conducere ale impulsurilor vasului) setate la 1s/50 = 0,02 secunde, apoi 20 milisecunde.

Malyunok 3
Ceea ce este important este că poziția arborelui de ieșire al servomotorului este determinată de puterea impulsului care este furnizat. Pentru clarificare, micuțul 4 arată relația aproximativă dintre lățimea impulsului în coordonatele ceasului și direcția de rotație a arborelui de servomotor. Controlul rotației arborelui servomotor este supus unor impulsuri suplimentare cu o frecvență de 1 până la 2 ms (milisecunde).

Malyunok 4
După cum se poate observa din grafic, pentru a controla servomotor, se folosește nimic mai mult decât un semnal de la modularea lățimii impulsului - PWM. Puteți afla ce este acest PWM din următoarele statistici de pe site-ul nostru.
Și cum se transformă lățimea impulsului în arborele de ieșire?
Așa cum este atribuit bebelușului 2, carcasa servomotorului are un alt modul electronic de control al motorului. Semnalul trimis către servomotor se pierde pe placă. Iar axa care este generată de acest semnal este prezentată în continuare în diagrama bloc a bebelușului 5, pe care o analizăm pas cu pas. Stadiul pielii este reprezentat cu un rect sau un cerc și numerotat. În mijlocul acestor imagini cutanate directe se află dispozitivele în care este procesat semnalul.

Malyunok 5
De asemenea, semnalul de control de intrare SP cu modulație PWM ajunge la un microcircuit special cu elemente logice, care este apoi convertit în tensiune Upr (etapa nr. 1). După acest semnal Ucontrol (tensiunea nucleului) se găsește elementul de egalizare a tensiunii. Acest element se numește sumator, dar de fapt, din semnalul de intrare Ucontrol, produce o tensiune Urev (tensiune de retur), care trece prin conexiunea de retur de la rezistența de schimb (pasul nr. 2).
Tensiunea Ucorr (tensiune corectabilă) care a ieșit este forțată în acțiune de către booster (pasul nr. 3) și este furnizată motorului electric. Motorul se întoarce (pasul nr. 4) și conduce arborele de ieșire către servomotor și, în același timp, senzorul de rotație sub forma unui potențiometru. Când mânerul potențiometrului este rotit, tensiunea se schimbă și iese, astfel încât rotația arborelui se schimbă la tensiunea Urev (pasul nr. 5). Această tensiune U va fi egalizată (pasul nr. 2) cu tensiunea Ucontrol, iar diferența va apărea imediat ce ne întoarcem la booster (pasul nr. 3) și așa mai departe. Semnalul este să „mergi” cu lanceta de la articulația gulerului până la ora la care se încheie relația Ucontrol = Urev. Apoi accelerația devine egală cu 0, iar motorul începe să încetinească. Acest lucru se va întâmpla dacă arborele servo este într-o poziție care corespunde semnalului de intrare care controlează Super.
Să punem totul în perspectivă. Arborele servomotorului este conectat mecanic la mânerul potențiometrului. Concomitent cu rotirea servomotorului, potențiometrul se rotește, drept urmare rulmentul său se schimbă și tensiunea de ieșire Urev. Aparent, tensiunea de ieșire de la potențiometru este situată direct în punctul în care se rotește servomotor. În același timp, semnalul servo-acționării Ucontrol de intrare cu o trivalitate de impulsuri de 0,001 până la 0,002 secunde setează nivelul tensiunii Ucontrol, care indică cât de mult trebuie să se rotească arborele servo-acționare. Brațul motorului electric, în momentul în care arborele servo în sine se află în poziția cerută, ajunge la brațul pentru semnalul Ucontrol semnalul semnalizatorului Uobraz. Și amplificatorul pentru etapa nr. 3 este necesar, astfel încât motorul electric să fie furnizat cu o tensiune puternică, iar motorul să deplaseze arborele către servomotor în poziția specificată cât mai repede posibil.
Aplicați servomotorul
După cum sa spus mai sus, pentru a controla servomotorul, trebuie să utilizați parametrii PWM. Un astfel de PWM poate fi generat într-o varietate de moduri. Să le arătăm ce fac.
1. Controlul servomotorului folosind un temporizator suplimentar 555 . Cipul de cronometru 555 poate fi operat în modul generator de impulsuri (pentru un raport despre acest cip, citiți articolul însoțitor). Este posibil apoi să selectăm astfel de parametri pentru funcționarea acestor microcircuite astfel încât să fie generate impulsurile de care avem nevoie. Prin modificarea vitezei acestor impulsuri, adică prin schimbarea vitezei impulsurilor de la 0,001 la 0,002 secunde, vom seta viteza de rotație a arborelui servo-motor.
Pentru a implementa un semnal PWM, este necesar să se creeze un circuit cu spațiere reglată a impulsurilor la o frecvență constantă de 50 Hz. Parametrii componentelor din diagramă (Fig. 6) sunt selectați astfel încât să se asigure siguranța. Dacă semnalul kerubanului este de a satisface toate mințile, el trebuie inversat. Tranzistorul din circuit este absolut necesar. Pentru a determina temperatura în intervalele specificate, veți avea nevoie de un potențiometru cu un suport maxim de 20 kOhm. Vom folosi două potențiometre de 10 kOhm fiecare (acești potențiometre sunt folosiți în setul principal al Evolvectorului de nivel 1, acest circuit este descris în detaliu. Viteza de funcționare a servomotorului este setată la 180 de grade. iar mânerele unui potențiometru. a servomotor se va roti în grade, iar pentru înfășurarea suplimentară a celuilalt - la alte 90 de grade.

Malyunok 6
Este mai bine să citiți această diagramă și o puteți ridica cumpărând setul de bază al Evolvectorului de nivel 1.
2. Controlul servomotorului cu ajutorul unui controler. Z De asemenea, este posibil să generați semnalul PWM necesar cu ajutorul unui controler suplimentar. De exemplu, puteți programa controlerul pe platforma Arduino. Pentru a simplifica pe cât posibil programarea algoritmului de control al servomotorului (generarea PWM), începeți să scrieți programe numite biblioteci. Codul programului nostru pliabil, care este primit de la corespondent, este tradus folosind funcțiile de care avem nevoie folosind comenzi scurte atunci când conectăm biblioteca la programul nostru principal. Din punct de vedere algoritmic, controlul unor dispozitive precum servomotoare este extrem de simplu și manual.
Schema de conectare, precum șiO schiță (program) pentru controlerul servomotor Arduino arată puțin 7.
Malyunok 7
AVERTISMENT: Racordarea servomotorului la placa este la mijloc, ca la cap (Figura 7), nu este necesar. Pentru numărul nostru mic de conexiuni avem un servomotor din categoria „minus”, care gestionează chiar și debitele mici prin care lucrăm în mod regulat, alimentând direct pe placă. Un servomotor de dimensiune standard necesită o forță mai mare, ceea ce poate cauza supraîncălzirea și deteriorarea controlerului. Conexiunile la durata de viață a motoarelor trebuie făcute numai printr-o serie de trenuri de transmisie, mai ales când puterea este transferată simultan către servo-uri.
#include<Servo.h>- Această comandă înseamnă conectarea bibliotecii pentru controlul servomotor. Această bibliotecă se află pe discul Evolvector, care este furnizat împreună cu seturile noastre de alte niveluri. De asemenea, le puteți găsi pe Internet și le puteți plasa în folderul „biblioteci” al IDE-ului dvs. Arduino.
Biblioteca conectată conține un număr mare de comenzi, ne vom uita doar la cele care sunt utilizate în program.
Servo dvig; - aceasta este o schimbare de tip special. dvig- aceasta este modificabilă (numele este ales suficient). Servo- acest tip de modificare (un tip special care este specificat în biblioteca dobândită). Puteți instala până la 12 tipuri modificabile pentru a controla 12 servo-uri. Cu alte cuvinte, cu această comandă am informat placa că avem un servo drive, pe care l-am sunat dvig.
dvig.attach(9);- Această comandă înseamnă că servomotor ( dvig) adăugați până la 9 pinu (visnovku).
dvig.write (90); - această comandă schimbă servomotor ( dvig) întoarceți-vă în poziția de mijloc (90 de grade).
dvig.write(0); - Rotește servomotor într-o poziție de 0 grade.
dvig.write (180); - Rotește servomotor într-o poziție de 180 de grade.
Puteți afla ce înseamnă rândurile programului pe paginile site-ului nostru sau aflați de la principalii angajați cum să intrați în depozit
Acest articol acoperă servomotor: dispozitivele lor, funcțiile, conexiunile servo drive-urilor, conexiunile servo drive-urilor, tipurile de servo unități și alinierea lor. Să începem și să înțelegem ce este un servomotor.
Înțelegeți servomotor
Un servomotor este cel mai adesea înțeles ca fiind un mecanism cu un motor electric, căruia i se poate cere să se rotească într-o anumită direcție și să se ajusteze la acea poziție. Cu toate acestea, acest lucru nu este complet în afara sensului.
Pentru a spune clar, servomotorul este condus printr-o legătură de control negativ, care vă permite să controlați cu precizie parametrii volanului. Un servomotor este un tip de acţionare mecanică care conţine un senzor (poziţie, fluiditate, forţă etc.) în depozit şi o unitate de comandă a acţionării care reglează automat parametrii necesari senzorului şi dispozitivului în funcţie de setarea externă. .
Cu alte cuvinte:
Servoacționarea primește ca intrare valoarea parametrului pe care îl controlează. De exemplu, după colț
Unitatea de încălzire este egală cu valorile de pe senzorul său
Pe baza rezultatului ajustării, se efectuează acțiunea, de exemplu: rotire, accelerare sau creștere, astfel încât valoarea senzorului intern să devină mai aproape de valoarea parametrului extern care controlează
Servo-urile sunt extrem de largi, ceea ce reduce numărul de sarcini și servo-urile, care mențin viteza de înfășurare specificată.
O unitate obișnuită de servomotor este prezentată mai jos.
Cum sunt controlate servomotoarele?
Atașare la servomotor
Servo drive-urile transportă o grămadă de piese de stocare.

Acționare – motor electric cu cutie de viteze. Pentru a converti sistemul electric în rotație mecanică, ceea ce este necesar motor electric. Cu toate acestea, cel mai adesea fluiditatea motorului este prea mare pentru un motor practic. Pentru a reduce lichiditatea, utilizați vikoryst cutie de viteze: un mecanism cu roți dințate care transmite și transformă cuplul.
Pornind motorul electric, puteți înfășura arborele de ieșire - angrenajul final al servomotorului, de care puteți atașa orice doriți. Protejați astfel încât poziția să fie controlată de dispozitiv este necesar senzor de semnalizare - codificator, care va face întoarcere la semnalul electric. În acest scop este adesea folosit un potențiometru. La rotirea cursorului potențiometrului, suportul este schimbat, proporțional cu rotația. În acest fel, cu această asistență suplimentară, puteți instala o freză de filet pentru mecanism.
Între motor electric, cutie de viteze și potențiometru există o umplere electronică în servomotor, care indică primirea unui nou parametru, valoarea citită de la potențiometru, alinierea acestora și pornirea/oprirea motorului. Vaughn este responsabil pentru susținerea conjuncturii negative.
Este nevoie de trei săgeți pentru a ajunge la servo. Două dintre ele indică durata de viață a motorului, al treilea emite un semnal care controlează care este folosit pentru a seta poziția dispozitivului.
Acum să vedem cum să controlăm servomotor.
Comandă servomotor. Interfața semnalelor ceramice
Pentru a spune servomotor poziția sa, trebuie să trimiteți un semnal în care scop. Semnal de întărire - impulsuri de frecvență constantă și lățime variabilă.

Cele în care poziția poate ocupa servomotor trebuie să rămână în prezența a până la două impulsuri. Când un semnal ajunge în circuitul care îl controlează, generatorul de impulsuri situat în acesta își vibrează pulsul, a cărui intensitate este indicată printr-un potențiometru. Cealaltă parte a circuitului este egală cu intensitatea celor două impulsuri. Imediat ce se produce deteriorarea, motorul electric începe să funcționeze. Direct, wrap-ul este indicat de care dintre impulsuri este scurtă. De îndată ce pulsurile devin mai puternice, motorul electric începe să încetinească.
Cel mai adesea, în serverele de hobby, pulsurile vibrează la o frecvență de 50 Hz. Aceasta înseamnă că pulsul este transmis și primit o dată la 20 ms. Dacă impulsul de impuls este de 1520 µs, înseamnă că servomotor este forțat să ocupe poziția de mijloc. O creștere sau modificare a pulsului va face ca servomotorul să se rotească în spatele săgeții sau împotriva săgeții într-un mod similar. În acest caz, există o limită superioară și inferioară între impuls. Biblioteca Servo pentru Arduino are următoarele valori pentru impulsul de impuls: 544 µs – pentru 0° și 2400 µs – pentru 180°.
Vă rugăm să rețineți că pe dispozitivul dvs. specific, setările din fabrică pot părea a fi suprascrise față de cele standard. Unitățile servo oferă o lățime a impulsului de 760 µs. Poziția de mijloc este de 760 µs, la fel ca pentru servo-urile convenționale, poziția de mijloc este de 1520 µs.
De asemenea, înseamnă că este mai mult decât doar luat înainte. Totuși, în cadrul aceluiași model, servomotor poate avea un defect, care este permis în timpul vibrațiilor, ceea ce duce la faptul că domeniul de funcționare al impulsurilor este ușor redus. Pentru o funcționare precisă a pielii, un servomotor specific poate fi calibrat: prin experimentare, este necesar să se selecteze intervalul corect caracteristic al acestuia.
Dacă chiar vrei să-ți pierzi respectul, atunci merită în terminologie. Adesea metoda de control a servomotoarelor se numește PWM/PWM (Pulse Width Modulation) sau PPM (Pulse Position Modulation). Nu este cazul și utilizarea acestor metode poate deteriora unitatea. Termenul corect este PDM (Pulse Duration Modulation). Pentru unii, durata impulsurilor este importantă, iar frecvența apariției lor nu este atât de importantă. 50 Hz nu este norma, dar servomotor funcționează corect atât la 40, cât și la 60 Hz. Singurul lucru de care este nevoie pentru orice mamă este că, cu o schimbare puternică a frecvenței venelor, acestea pot efectua smucituri și cu scăderea tensiunii, iar cu o frecvență puternică (de exemplu, 100 Hz) se pot supraîncălzi și renunță. Bine.
Caracteristicile servomotoarelor
Acum să ne dăm seama ce sunt servomotoarele și care sunt caracteristicile lor.
Cuplul și viteza de rotație
Să vorbim acum despre două caracteristici foarte importante ale servomotor: cupluși despre viteza de viraj.
Momentul forței, sau momentul de rotație, este o mărime fizică vectorială, care este adăugarea tradițională a vectorului rază tras de la axa de rotație până la punctul forței raportate, la vectorul forței. Caracterizează acțiunea externă a forței asupra unui corp solid.

În termeni mai simpli, această caracteristică arată cât de important este ca un servomotor să rămână calm într-o anumită zi. Deoarece cuplul de rotație al servomotorului este mai mare de 5 kg×cm, aceasta înseamnă că servomotorul este apăsat pe vază în poziție orizontală până la 1 cm, iar 5 kg sunt atârnate la celălalt capăt. Sau, în mod echivalent, este important să adăugați 5 cm la 1 kg.
Viteza servomotorului variază la intervalul de oră necesar pentru ca servomotor să se rotească cu 60°. Caracteristica 0,1 s/60° înseamnă că servo-ul se rotește cu 60° în 0,1 s. Este dificil de calculat viteza unei valori mai mari, rpm, dar s-a întâmplat ca atunci când descriem servo-uri, această unitate este cel mai des folosită.
Vă rugăm să rețineți că uneori trebuie să faceți un compromis între aceste două caracteristici, deoarece dacă doriți un servomotor de încredere, care să poată vedea multă putere, atunci trebuie să fim pregătiți pentru ca instalația să se poată roti complet. Și dacă ne dorim un impuls foarte puternic, va fi foarte ușor să-l scoatem din poziția de egalitate. Când același motor este în rotație, echilibrul este determinat de configurația angrenajelor din cutia de viteze.
Bineînțeles că acum putem folosi un aparat care produce multe dureri și bătăi de cap, astfel încât caracteristicile lui să satisfacă nevoile.
Factor de formă
Unitățile servo variază în dimensiune. Și deși nu există o clasificare oficială, producătorii încearcă de mult timp să determine câte dimensiuni există din remodelarea utilizată în mod obișnuit a elementelor de prindere. Ele pot fi împărțite în:
mic
standard
Duhoarea apare cu aceste dimensiuni caracteristice:
Sunt numite și servo-uri de „tip special” cu dimensiuni care nu se califică pentru această clasificare, deși numărul de astfel de servo-uri este destul de mic.
Interfață internă
Servo drive-urile sunt fie analogice, fie digitale. Deci, care sunt punctele lor forte, avantajele și deficiențele lor?
Sunetele nu sunt afectate de nimic: motoarele electrice, cutiile de viteze și potențiometrele sunt aceleași, sunt afectate doar de electronica ceramică internă. În loc de un microcircuit special pentru un servo drive analogic într-un geamăn digital, puteți instala un microprocesor pe placă care primește impulsuri, le analizează și controlează motorul. Astfel, o persoană fizică are mai puțină putere în modul în care impulsurile sunt procesate și procesate de către motor.

Din păcate, servomotorul primește în continuare impulsurile pe care le controlează. După aceasta, servomotor analogic ia decizia de a schimba poziția și trimite un semnal motorului atunci când este necesar. Se aude la o frecvență de 50 Hz. În acest fel setăm 20 ms – ora minimă de reacție. În acest moment, poate fi necesar să schimbați poziția servo-acționării. Dar există o singură problemă. Când motorul electric este în repaus, nu este furnizată tensiune; când există o presiune mică asupra motorului electric, un semnal scurt de tensiune joasă este trimis către motorul electric. Cu cât mai multă inspirație, cu atât semnalul este mai puternic. În acest fel, cu intrări mici, servomotor nu poate întoarce rapid motorul sau dezvolta un cuplu ridicat. „Zonele moarte” dispar în decurs de o oră.
Această problemă poate fi cauzată de o creștere a frecvenței de recepție, procesare a semnalului și funcționare a motorului electric. Servodrivele digitale folosesc un procesor special care primește impulsuri de control, le procesează și trimite semnale către motor cu o frecvență de 200 Hz sau mai mult. Se pare că servomotor-ul digital este mai capabil să reacționeze la intrările externe, ceea ce ne permite să dezvoltăm viteza și cuplul necesare pentru a se roti și, prin urmare, să menținem mai bine poziția dată, ceea ce este bun. Desigur, în acest caz se folosește mai multă energie electrică. De asemenea, servo-urile digitale sunt pliabile în producție și, prin urmare, costă mult mai mult. Ei bine, doar două neajunsuri - toate dezavantajele pe care le au servo-urile digitale. Din punct de vedere tehnic, servo-urile analogice pot copleși cu ușurință.
Materiale angrenaj
Angrenajele pentru servo vin din diverse materiale: plastic, carbon, metal. Toate sunt foarte variate, în funcție de sarcina specifică și de ce caracteristici sunt necesare în instalație.

Din plastic, cel mai adesea nailon, angrenajele sunt foarte ușoare, nu sunt susceptibile la uzură și sunt mai late în servo. Mirosurile nu afectează avantajele mari, dar din moment ce avantajele sunt transferate la cele mici, atunci roțile din nailon sunt cea mai bună alegere.
Angrenajele din carbon sunt mai durabile și practic nu se uzează, în comparație cu cele din nailon. Principalul neajuns este drumul.
Roțile din metal sunt cele mai importante, protejând împotriva mirosurilor și asigurând o atenție maximă. Dacă obosești suficient, va trebui să schimbi vitezele aproape în fiecare sezon. Angrenajele din titan sunt preferatele dintre angrenajele metalice, atât ca caracteristici tehnice, cât și ca preț. Din păcate, duhoarea te va costa scump.
Motoare colectoare și fără perii
Există trei tipuri de servomotoare: un motor de bază cu miez, un motor fără miez și un motor fără perii.

Motorul primar cu miez (pe dreapta) are un rotor de alunecare puternic, cu o înfășurare fină și magneți în jurul lui. Rotorul are o singură secțiune, așa că atunci când motorul se rotește, rotorul vibrează o mică oscilație a motorului pe măsură ce secțiunea trece prin magnet și, ca urmare, iese un servomotor, care vibrează și este mai puțin precis, un servomotor cu motor fără miez. Un motor cu rotorul gol (stangaci) misca un singur miez magnetic cu o infasurare in forma de cilindru sau inele in jurul unui magnet. Designul fără miez este ușor și nu are secțiuni, rezultând o funcționare mai lină și o funcționare fără vibrații. Astfel de motoare sunt mai scumpe, dar oferă un nivel mai ridicat de control, cuplu și viteză decât cele standard.

Recent au apărut servomotoare cu motoare fără perii. Avantajele sunt aceleași ca la alte motoare fără perii: nu există perii, ceea ce înseamnă că nu deteriorează suportul învelișului și nu se uzează, fluiditatea și cuplul sunt mai mari decât cele ale motoarelor fără perii. Servomotorizările cu motor fără perii sunt cele mai scumpe servomotoare, care oferă performanțe mai bune decât servomotoarele cu alte tipuri de motoare.
Conexiuni la Arduino
Multe servo-uri pot fi conectate direct la Arduino. Pentru ce tip este potrivită un tren de trei săgeți:
chervoniy - tavernă; conectați-vă la contactul de 5V sau direct la linia de salvare
maro sau negru – pământ
galben sau alb – semnal; se conectează la ieșirea digitală Arduino.
Pentru a conecta Arduino, va fi ușor să utilizați o placă de extindere a porturilor, cum ar fi Troyka Shield. Dacă doriți cu câteva fire suplimentare, puteți conecta servo-ul prin placa de breadboard sau direct la contactele Arduino.
Puteți genera singur impulsuri laser, dar cu o gamă mai largă de setări, biblioteca standard Servo este folosită pentru simplitate.
taverna Obezhennya
Servomotor Hobi primar menține peste 100 mA pe parcursul unei ore de funcționare. Când utilizați Arduino, puteți vedea până la 500 mA. Dacă trebuie să instalați o unitate servo strânsă în proiectul dvs., ar trebui să vă gândiți să o vedeți în circuit din hardware suplimentar.
Să aruncăm o privire la conexiunea cap la cap a servomotorului de 12 V: 
Luați în considerare numărul de servo-uri care sunt conectate.
Pe majoritatea plăcilor Arduino, biblioteca Servo acceptă controlul a cel mult 12 servo-uri, pe Arduino Mega acest număr crește la 48. Cu toate acestea, există un mic efect secundar al bibliotecii: dacă nu lucrați cu un Arduino Mega, atunci devine dificil să utilizați funcția analogWrite() pe 9 și 10 contacte, indiferent dacă servomotor este conectat la oricare dintre contacte. Pe Arduino Mega puteți conecta până la 12 servo-uri fără a întrerupe funcționalitatea PWM/PWM; dacă aveți un număr mare de servo-uri, nu puteți utiliza analogWrite() pe pinii 11 sau 12.
Funcționalitatea bibliotecii Servo
Biblioteca Servo vă permite să programați unități servo. În acest scop, schimbați la tipul Servo. Controlul implică următoarele funcții:
attach() - adaugă o modificare la un anumit pin. Există două opțiuni de sintaxă pentru această funcție: servo.attach(pin) și servo.attach(pin, min, max). În acest caz, pinul este numărul pinului la care va ajunge servo-acționarea, min și max sunt numărul maxim de impulsuri în microsecunde corespunzător unei viraj de 0° și 180°. Pentru curățare, valorile sunt egale cu 544 μs și 2400 μs în mod constant.
write() - comandă servomotor să accepte noua valoare a parametrului. Sintaxă avansată: servo.write(angle) , unde unghiul este direcția în care servo poate roti.
writeMicroseconds() - trimite o comandă pentru a trimite un al doilea impuls către servo, care este analogul de nivel scăzut al comenzii înainte. Sintaxă avansată: servo.writeMicroseconds(uS) , unde uS este pulsul suplimentar în microsecunde.
read() - Citește mai precis valorile compartimentului în care se află servomotor. Sintaxă avansată: servo.read() rotește întreaga valoare de la 0 la 180.
attached() - verificarea faptului că valoarea atașată este schimbată la un anumit pin. Sintaxa atacurilor: servo.attached() , adevărul logic se întoarce, dacă schimbarea a fost mâncată în cea mai mare măsură, sau minciuna este în ultima fază.
detach() - faceți treaba, inversați acțiunea attach() , astfel încât modificarea să se facă din pinul căruia i-a fost atribuit. Sintaxa Detach: servo.detach().
Toate metodele din biblioteca Servo2 se bazează pe metode Servo.
Capul bibliotecii Servo
Înlocuire
Servo drive-urile vin în diferite variante, unele sunt mai bune - unele sunt mai ieftine, altele sunt mai fiabile - unele sunt mai precise. Și înainte de a cumpăra un servomotor, asigurați-vă că are caracteristici mai bune, astfel încât să fie potrivit pentru proiectul dvs. Mult succes in demersurile tale!
Servo drive (acționare pentru cusătură)- Conduceți către keruvannyams printr-o legătură gateway negativă, care vă permite să controlați cu precizie parametrii rukhu-ului.
Un servomotor este orice tip de acţionare mecanică (dispozitiv, element de operare) care conţine un senzor (poziţie, fluiditate, etc.) şi o unitate de control al conducerii (circuit electronic sau sistem de tracţiune mecanică), care ajustează automat parametrii necesari senzorului. ( i Da, pe dispozitiv) până la valoarea externă specificată (poziția butonului de control sau valoarea numerică în alte sisteme).
Material de pe Wikipedia - enciclopedia liberă
Servo drive este un sistem de antrenare care, pe o gamă largă de control al fluidității, asigură procese dinamice, de înaltă precizie și asigură o bună repetabilitate a acestora. Acest sistem este conceput pentru a produce cuplu, fluiditate și poziție cu precizie și dinamică specificate. Clasic servomotor constă dintr-un motor, un senzor de poziţie şi un sistem de control, care are trei circuite de control (poziţie, viteză şi debit).
Cuvântul „servo” este similar cu cuvântul latin „servus”, care înseamnă slujitor, sclav, asistent. În sălile de mașini, era important să existe unități suplimentare (alimentări de acționare la bancurile de lucru, roboți de acționare etc.). Cu toate acestea, astăzi situația s-a schimbat, acum unitățile de cap sunt implementate cu ajutorul tehnologiei servo.
La ora asta, servo-uri Există o problemă acolo, deoarece nu există o precizie suficientă în reglementarea convertoarelor de frecvență industriale primare. Zastosuvannya bogat în acid servomotoare necesara unei instalatii foarte productive, unde productivitatea este criteriul principal. Servoacționări să fie echipat cu sisteme de precizie pentru menținerea fluidității și poziționării roboților industriali și a mașinilor de înaltă precizie. Servo Instalat si pe bancuri de foraj jig, pe diverse sisteme tehnologice de transport, pe diverse mecanisme auxiliare etc. servo-uri.
universal servomotor
universal servomotor caracterizat printr-un set bogat de funcții, capacitatea de a controla servomotoare de diferite tipuri (atât sincrone, cât și asincrone), capacitatea de a opera cu diferiți senzori de poartă, precum și disponibilitatea unui număr de opțiuni și extindere. Aparent universal Servoacționare pe KEB F5-Multi (Nimechchina) și Control Techniques Unidrive SP. (Anglia)
Servoacționare bazat pe KEB F5-Multi
Servo drive KEV" align="RIGHT" width="20%" border="0">Controler de antrenare electric cu circuit de poarta pentru motoare sincrone si asincrone. Special concepute pentru funcționarea în buclă închisă, posibile variante ale conexiunii în buclă:
rezolutor
codificator
Senzor de poziție Sin-Cos
senzor de poziție absolută
EnDat, Hiperface sau tahogenerator
Principalele caracteristici și caracteristici:
gamă largă de presiuni
tensiune 220 sau 380 V
Este posibil să trăiești cu un flux constant
motor keruvannya fără senzori
intrări/ieșiri analogice și digitale izolate galvanic
relee și ieșiri programate cu tranzistori
Este posibil să se implementeze conceptul de încălzire descentralizată cu un sistem de acționare, evident:
reglarea vitezei și a cuplului
controlul poziției
moduri de împachetare înguste
Cam remixere
Cam disc electronic
Poziționare pe o singură axă
Poziția mesei rotative
Toate unitățile acceptă cele mai recente interfețe Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet și KEB-HSP5/DIN 66019-II.
Vikonavchy și special Servoacționare
Servoacționarea finală funcționează sub controlul controlerului, permițând selectarea funcțiilor și ajustărilor care sunt simple pentru robot. Prin urmare, servomotorul final este mai economic. Să aruncăm o privire la Vikonau Servo pe fundul sincronului servomotoare Mecapion.
Servomotor Mecapion

Sincron Servo Mecapion (ex. Metronix) este un produs de bază pentru soluții de sistem în automatizarea industrială, care este cunoscut de mult timp muncitorilor ruși.
Caracteristici principale servomotoare Metronix
interval de presiune de la 0,03 la 11 kW
Încorporarea unui kit de recuperare, care vă permite să întoarceți energia și încorporarea unei chei pentru descărcarea energiei în timpul galvanizării dinamice
modul de testare a ajustării frecvenței robotizate
Funcțiile de reducere a vibrațiilor atunci când motorul este pornit și butucul acestuia vă permit să porniți robotul prin schimbarea frecvenței în modul colival atât în timpul punerii în funcțiune, cât și în timpul funcționării
Posibilitatea de a utiliza atât senzori de poziție absoluti, cât și absoluti
selectați modul sistemului de control al robotului - controlul vitezei sau al cuplului
Încăpăţânarea pachetului cu părul roz al uitării programatice este permisă cu ușurință de același șarpe în frecvența de scotocire a lui Virishuvati pe baza yogo a techychniilului (inclusiv unitățile puppaysovynnya)
Prezența motoarelor cu arborele gol în linia de produse Metronix vă permite să porniți dispozitivul intermediar - un cuplaj adecvat - folosind diagrame cinematice
Ieșirile programate permit sistemelor să funcționeze cu un nivel ridicat de protecție în cazul diverselor situații de urgență și cu conținut maxim de informații pentru operator
Seria VS este un aprinzător standard care implementează controlul vitezei, cuplului (±10 V) și poziției (pas/dir).
Frecvențele de conversie ale seriei VS pot fi utilizate în următoarele moduri:
schimbarea poziției cu ajutorul unui controler extern, care stabilește secvența impulsurilor.
Oferă operare de mare viteză pe intrări analogice sau intrări discrete.
Controlul cuplului intrării analogice în modul de schimb de cuplu maxim.
Keruvannya swidkіst/poziție.
keruvannya cu viteză/moment.
keruvannya poziție/moment.
Seria specială VP este destinată unor sarcini speciale:
Poziționare în coordonate liniare cu o alegere de până la 64 de poziții, șase intrări discrete (VP1), domeniul de aplicare tipic - asigurarea mișcării liniare în sistemele cu transmisie pe șurub cu bile
poziționare curentă cu capacitatea de a selecta până la 32 de poziții, cinci intrări discrete (VP2), zone tipice de depozitare - mese rotative, linii transportoare rotative, dispozitive automate de schimbare a sculei etc.
poziționare cu avans variabil (VP3), domeniu de aplicare tipic - mașini de ambalat, toate tipurile de dispozitive care sunt furnizate cu poziționare atât prin semnalul de la codificatorul de pe arborele motorului, cât și prin semnul unui senzor extern discret
Poziționare programabilă cu posibilitatea de a selecta până la 8 programe cu trei intrări discrete (VP5), fiecare program poate avea până la 100 de poziții (poziții), care sunt stocate în memoria de inversare a frecvenței
Pentru a lega conversia frecvențelor VS și un computer personal (industrial), se folosește un port COM; dacă este necesar, printr-un convertor RS232/RS485, frecvențele de conversie pot fi combinate
Integrari Servoacționare
align="RIGHT" width="30%" border="0">Principalul orez de legume, precum și cel mai important produs, integrat servomotorє motor, controler, senzor de poartă și comutare de frecvență într-o singură carcasă. Reducerea operațiunilor de instalare la minimum, va simplifica conectarea și configurarea, va accelera timpul petrecut la muncă, va economisi spațiu semnificativ și va avea, de asemenea, un efect pozitiv asupra productivității. servomotor.
Pe piața rusă au reușit deja să se arate amabil și să recomande integrarea internă a Federației Ruse. Servo SPS.
control atemporal (vector) bazat pe un algoritm adaptat pentru motoarele de timp
performante dinamice ridicate pentru debitul circuitelor inchise pentru reglarea debitelor in infasurarile motorului
Vikoristana de bucle închise de fluiditate
vibrație scăzută pentru cadrul zusilla, care este reglat dinamic
design gândit și instalare ușoară
compact ca dimensiune și mic ca greutate
Moduri robot servomotor SPS
Dinamic - semnalul de la controlerul de nivel superior este transmis printr-o interfață digitală în timp real. Modul dinamic este utilizat în sistemele care necesită alinierea conturului (de exemplu, manipulatoare cu cinematică de pliere și tabele de coordonate pentru o poziționare precisă).
Analogic - control cu un semnal de mare viteză de ±10 V. Acest mod vă permite să utilizați unitatea pentru a actualiza controlul cu sisteme de control analogice sau să îl controlați manual (de exemplu, în spatele unui volan suplimentar).
Ciclic - afișează operațiunile ciclice programate de controlerul nivelului superior și economiile în memoria unității. Adesea, acest lucru vă permite să opriți controlerul extern al nivelului superior al sistemului de control. Modul ciclic este folosit, de exemplu, pe benzi transportoare și în operațiuni incomode de depozit.
Marzed - acest mod permite ca sistemul să fie împărțit în diferite diviziuni ale sistemului servo bazat pe interfața digitală CAN, pentru a implementa mișcări sincrone sau secvențiale ale mai multor axe. În acest caz, este posibil să utilizați și modul „master-slave”, în care unitatea funcționează în poziția de repetare a arborelui de antrenare.
În proiectarea echipamentelor zilnice, care sunt create pe baza tehnologiilor înalte, diferite procese automate se dezvoltă și se perfecționează treptat. Printre acestea se numără un servomotor cu lățime largă, care este instalat folosind metoda de interacțiune cu elementele adiacente și părți ale unităților dinamice constante. Aceste dispozitive asigură controlul constant asupra unghiurilor de rotație ale arborelui și stabilesc fluiditatea necesară dispozitivelor de tip electromecanic.
Partea de stocare a acestor sisteme sunt servomotoare, care permit mișcarea fluidelor în intervalul necesar la anumite momente. Astfel, toate procesele și procesele pot fi repetate periodic, iar frecvența acestor repetări este stabilită în sistemul de control.
Atașare la servomotor
Principalele părți care alcătuiesc un servomotor tipic sunt rotorul și statorul. Pentru comutare, componentele speciale sunt instalate sub formă de mufe și cutii de borne. Managementul, controlul și corectarea proceselor au loc cu ajutorul unui nod central din apropiere. Pentru a întări și a amortiza servomotor, sistemul este vicorizat. Toate piesele sunt amplasate în carcasă.
Aproape toate servomotoarele au un senzor care procesează și monitorizează parametri importanți, cum ar fi poziția, puterea sau viteza de înfășurare. Unitatea de încălzire suplimentară acceptă modul automat al parametrilor necesari la operarea dispozitivului. Alegerea unuia sau a altui parametru este selectată în funcție de semnalele care vin de la senzor la interval de o oră.
Diferența dintre servomotor și motorul electric primar depinde de capacitatea de a instala arborele într-o poziție specificată cu precizie, care este măsurată în grade. Poziția setată, precum și alți parametri, sunt suportate de unitatea de control.
Principiul lor de funcționare se bazează pe conversia energiei electrice în energie mecanică, folosind un motor electric suplimentar. Ca transmisie, se folosește o cutie de viteze, care permite reducerea fluidității înfășurării la valoarea necesară. Arborii cu roți dințate intră în depozit și transmit cuplul.
Cum funcționează un servomotor?
Învelișul arborelui de ieșire al cutiei de viteze, conectat prin roți dințate la servomotor, este responsabil pentru pornirea motorului electric. Cutia de viteze în sine necesită reglarea numărului de înfășurări. Arborele de ieșire poate fi conectat la mecanisme și dispozitive care necesită reparații. Poziția arborelui este controlată de un senzor suplimentar de oprire, care este conceput pentru a converti semnalele electrice în jurul virajului și pe baza căruia este determinat principiul de funcționare al oricărui dispozitiv.

Acest senzor de tensiune este numit și encoder sau potențiometru. Când rotiți cursorul, suporturile acestuia se vor schimba. Schimbați suportul pentru a fi într-o poziție direct proporțională cu rotirea codificatorului. Acest principiu de funcționare vă permite să instalați și să fixați mecanisme în poziția dorită.
În plus, servomotorul conține o placă electronică care generează semnale externe sub forma unui potențiometru. În continuare, parametrii sunt ajustați, ale căror rezultate sunt urmate de pornirea motorului electric. De asemenea, există o penalizare negativă asociată cu utilizarea plății electronice.

Puteți conecta servomotorul folosind trei conductori suplimentari. Două dintre ele asigură durata de viață a motorului electric, iar al treilea este folosit pentru a transmite semnale de control pentru a conduce arborele în poziția dorită.
Este posibil să se evite presiunea dinamică supranaturală asupra motorului electric cu ajutorul unei accelerații line sau a unei galvanizări la fel de lină. Acesta este motivul pentru care microcontrolerele pliabile sunt folosite pentru a asigura un control mai precis și un control al poziției elementului de lucru. De exemplu, puteți îndrepta unitatea de disc a computerului, unde capetele sunt instalate în poziția necesară, folosind o unitate suplimentară de precizie.
Control servomotor
Motivul principal pentru care servomotorul funcționează în mod normal constă în funcționarea sa în întregime cu așa-numitul sistem G-code. Aceste coduri sunt un set de comenzi de control și setări pentru un program special.
Ca exemplu de control numeric CNC, în acest caz servo-urile interacționează cu. Este necesar să modificați valorile tensiunii de pe înfășurarea alarmei sau armătura motorului electric la nivelul tensiunii de intrare.

Controlul direct al servomotorului și sistemul funcționează dintr-un singur loc - unitatea de control. Când este emisă o comandă pentru deplasarea pistei de-a lungul axei de coordonate X, o tensiune a valorii pistei apare în comutatorul analogic digital, care este necesară pentru a alimenta unitatea cu acea coordonată. Servomotorul începe cu un rotor exterior al șurubului de rulare, conectat la encoder și la butonul mecanismului principal.
Impulsurile sunt vibrate în encoder, care este susținut de blocul care controlează servomotor. Programul conține o varietate de semnale de la codificatorul instalat în stație, care pot trece prin mecanismul final. La ora necesară, convertorul analogic, după ce a respins puterea pulsului setată, acceptă tensiunea de ieșire, în urma căreia servomotorul este comprimat. Deci, chiar sub afluxul de impulsuri, tensiunea este reînnoită și funcționarea întregului sistem este reînnoită.
Vezi caracteristicile
Servomotoarele sunt disponibile într-o varietate de opțiuni, permițându-le să fie utilizate într-o varietate de domenii. Structurile principale sunt împărțite într-un colector și sunt proiectate pentru a funcționa ca un flux permanent și schimbător.
În plus, servomotorul poate fi sincron sau asincron. Dispozitivele sincrone pot seta viteza de înfășurare de înaltă precizie, precum și viteza de viraj și accelerație. Aceste unități măresc rapid viteza nominală a ambalajului. Servomotorizările dintr-un circuit asincron sunt controlate prin modificarea parametrilor circuitului atunci când frecvența acestuia este modificată de un invertor suplimentar. Ele vitrifică cu mare precizie fluiditatea specificată a vântului pentru cele mai joase învelișuri.

În funcție de schema de principiu și de proiectare, servomotorizările pot fi fie electromecanice, fie electrohidromecanice. Prima opțiune, care include o cutie de viteze și un motor, are o viteză mică. Într-un alt caz, acțiunea este chiar mai puternică decât pistonul din cilindru.
Servoacționarea este caracterizată de următorii parametri:
- Momentul de răsucire sau zusilla care apare pe arbore. Respectat ca cel mai important indicator al servomotoarelor robotizate. Pentru valoarea tensiunii pielii, se folosește momentul de putere pentru răsucire, care este afișat în pașaportul virusului.
- Flexibilitate la întoarcere. Acest parametru reprezintă perioada de timp în care este necesară schimbarea poziției arborelui de ieșire la 600. Această caracteristică depinde și de valoarea specifică a tensiunii.
- Unghiul maxim de rotație pe care îl poate roti arborele de ieșire. Cel mai adesea, această valoare este 180 sau 3600.
- Toate servomotoarele sunt împărțite în digitale și analogice. Controlul servomotor este strâns legat de acest lucru.
- Durata de viață a servomotoarelor. Majoritatea modelelor au tensiuni cuprinse între 4,8 și 7,2V. Viața și managementul se desfășoară cu ajutorul a trei ghiduri.
- Posibilitatea de a face upgrade la servo-acționare permanentă.
- Materialele pentru cutia de viteze pot varia. Angrenajele sunt fabricate din metal, carbon, plastic sau materiale compozite. Fiecare dintre ele are propriile sale succese și neajunsuri. De exemplu, piesele din plastic sunt puțin expuse la șocuri, dar sunt rezistente la uzură în timpul utilizării regulate. Cu toate acestea, angrenajele metalice se uzează rapid, apoi mirosul dezvoltă o rezistență ridicată la intensitatea dinamică.
Avantaje și dezavantaje ale servomotoarelor
Datorita dimensiunilor lor unificate, aceste dispozitive pot fi instalate usor si simplu in orice structura. Mirosul este tăcut și de încredere, pielea de la ele funcționează practic în tăcere, ceea ce este de mare importanță atunci când sunt folosite pe terenuri pliabile și similare. Cu viteze mici, puteți obține mișcări precise și fluide. Servoacționarea poate fi reglată de personal, în funcție de specificații.
După cum sunt indicate deficiențele, complexitatea cântecului atunci când este ajustată și o varietate la fel de mare.