Szervodrive - mi ez? Hogyan csatlakoztathatja a szervo meghajtót saját kezével? Mi a szervomotor és hogyan működik? Elektromos szervohajtások.
Zvorotniy zvorotniy zv'yazok vіd szervohajtás vagy "dugós virágok"
- Amperka cég blogja
Üdvözlet minden habrakonstruktornak!
Úgy kezdtem gondolkodni, mint egy meggondolatlan gondolat: vegyél fel egy eszközt, mint a virágokat kalapáló kalapács. Csak a robotszervó bemutató kedvéért. Az algoritmus egyszerű: parancsot adunk, hogy emelje fel a kalapácsot, ellenőrizze, amíg a bor felemelkedik, engedje el a kalapácsot; és így amíg a virágok el nem tömődnek. Honnan tudhatja meg, hogy a kalapács működik-e, és milyen színűek a dugulások anélkül, hogy további érzékelőkkel korrozív lenne? Kapcsolja be a "rossz" szervót! A zrobiti céljaként – a tse-ről és a staton lenni.
Mi az a szervo hajtás? Kétségtelenül mindent tud, de mindenféle ingadozásról: nem csak forog, amíg az erő be van kapcsolva, de ebben a helyzetben nem könnyű egy adott kuta és vtrimatisya felé fordulni. A Kut kiegészítő PWM (PWM) jelhez van telepítve. Szervóhajtású a megfelelő énektáborba, saját hatalmának nemességében is bűnös. A csutkacsutka előtt össze vagyok hajtva, így a jelenlegi kut áramellátása egyszerűbb lesz, mint egyszerű, és lehetséges, hogy „dobozból”. Nem volt ott. Ale mindenről rendben.
Otzhe, jósló kellék: egy kis talapzaton kalapáccsal az újhoz erősített szervo-meghajtó féltékenység miatt. A szervo IO Shielden keresztül csatlakozik az Arduinóhoz, a mikrokontroller pedig a következő algoritmust követi:
- Szerelje be a szervohajtást a kalapács emeléséhez
- Ne cselekedjen, amíg a szervodriver nem tudja, mit ért el
- Kapcsolja ki a szervó élettartamát, hogy a kalapács a virágokra essen
- Olvassa el a vágást a pozícióban, mi esett
- Yakshko kut az esés után a sarj egyszer úgy aludt, hogy nem változott - ez azt jelenti, hogy a virágok már nem tömődtek el. Imovirno, vіn klumpa - pripinyaєmo vikonannya
- Yakshko kut változás, indulunk vissza

Fűrészelés és csavarás:

Térjünk rá az Arduino firmware-jének megírására. A shvidko befejezése elég világos lett ahhoz, hogy telepítsünk egy dalt a szervihez – ez nem probléma. Zocrema, amely lehetővé teszi a szabványos szervo könyvtár létrehozását, hogy adott hőmérsékletről fokban megfelelő PWM jelet képezzen. A leolvasásokból származó tengely pedig probléma: nincsenek olyan funkciók, amelyekhez.
Gyorsan guglizva a problémát, ismerve a kupu povіdomlen a fórumokon, de on tse zapitanya hitelesen válaszolt: Tse lehetetlen! A szervomeghajtók csak írható mellékletek. Megkönnyebbültem, intuitív módon rájöttem, hogy egyszerűen lehet elég adatot szerezni.
matchastina
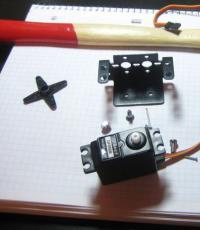
Néhány rövid poshukіv a merezhі után megértheti, hogyan uralkodnak a jobbágyon. Az állandó áramlás fő dvigunja, egyfajta kapcsolat egy spratt fogaskereken keresztül hajtott orsóval, amely alacsony fokozatot képez. Ugyanaz az orsó a belső oldalról fizikailag csatlakozik a potenciométerhez (pidstroyuvalny ellenállás). A motor bekapcsolásakor az orsó forog, a potenciométer csúszkája forog, a potenciométer feszültsége megváltozik, a servi yogo leolvasásra kerül és a feszültség elérte a megadott szintet - a meta elérte, a motor életben bekapcsol.Ezért lehet, hogy van egy potenciométerünk a jel után, amelyből áramlási sebességet rendelhetünk. Nem volt több rozіbrati szervohajtás és podklyuchitsya a szükséges helyen. Mi választunk:

Még egyszer elmondom, hogy a fényképen szereplő szervohajtást visszavonhatatlanul feltörtem a kiválasztási folyamat során. Az elektronikáért nem kellett díjat felszámolni, elég a hátlapot levenni, mivel 4 csavarra van kivágva. De ez nem volt azonnal nyilvánvaló, és ahhoz, hogy megértsem, hol van forrasztva a potenciométer a táblán, fel kellett áldoznom egy hajtást.
Tengely jak forrasztási potenciométer DFRobot típusú szervohajtásokon:

Szükségünk van egy jelre a futótól, ami a kanyarulatban az ugarban a minimálisról a maximális feszültségre változik. Fogunk egy multimétert, körbetekerjük az orsót és csodálkozunk: milyen kutam milyen jelet látsz. A 0°-os szervizemnél a feszültség 0,43, a 180°-os maximális fordulatnál pedig 2,56 V.
Óvatosan forrassza be az új jelvezetéket.

Csatlakoztassa a jógát az Arduino A5 analóg bemenetéhez. Lezárjuk a fedelet. Megírjuk a programot:
#beleértve
Kapcsold be, próbáld ki, gyakorolj!
Hogyan kell dolgozni az otrimanim dosvidom-mal - sok lehetőség van: hozzáadhat egy vezérlőt a hajókon győztes kshtalthoz a tolóerő telepítéséhez (hátra előre / hátra); a szervót egy gép autonóm kermvezérlésének elemeként viszonhívással verheti le; sok mindened lehet. Szia gyere velünk fantasy!
Szervodrive(latin servus - szolga, segítő; hoz, mit varrni)- Hozd át s keruvannyam negatív hívás , amely lehetővé teszi a mozgás precíz keruválását a paraméterekkel.
A szervodrive-ot leggyakrabban a robotikában használják. Enélkül lehetetlen megtenni, különösen, ha fontos tárgyak pontos mozgatásának feladatáról beszélünk. Egy ilyen feladat hibáztatható a vikonnanny órájában, legyen az egy mechanikus robot (farbuvannya, zavaryuvannya, köszörülés, a virobiov vékony mozgatása a szállítószalagon). A manipulátorok nyernek egy ilyen robotot, mintha mechanikus kezeknek tűnnének. A manipulátorok előtt bemutatják a Vlasne-t, a robotika ismert szakmáit, amelyek az egész világon győzedelmeskednek a rezgések automatizálásában. És egyetlen ilyen manipulátor sem nélkülözheti a jógában használt szervo meghajtókat. Miért?
Minden a jobb oldalon a szervó erejénél. A szervohajtás egy hajtás, amelyben van egy negatív irányjelző, amely lehetővé teszi a ruhu vykonavchoy (kimeneti) lanka paramétereinek pontos vezérlését a hajtáshoz (leginkább a forgótengelyhez). Ilyen irányjel létrehozásához hangolja meg a szervo hajtás helyzetérzékelőjét, vagy blokkolhatja a sebesség, zaj, stb érzékelőket.isya vagy forduljon meg ugyanabban a helyzetben. A pozíció visszaállítása és „ellenőrzése” esetén a dokkok nem igényelnek parancsot a pozíció megváltoztatásához. Például a tengely 90 fokos helyzetének csúcsán történő felszereléséről jelzést adnak. Az akna megfelelő helyzetbe fordul és megáll, a dokkok nem kapnak jelet új táborról. Egy ilyen fordulási lehetőség komolyan felélénkíti a szervohajtású motor-reduktort, amely már nem zavartalan az épületben, mindaddig, amíg a feszültséget az újra kapcsolják. Ennek eredményeként, ha egy robot ilyen meghajtókkal van felszerelve, akkor összeeshet, mint egy emberi kéz, és megverheti azt a robotot, ahogy mi is.
A szervohajtások választéka gazdag az iparban. Egyszerűbbnek tűnik, az ilyen szervo meghajtóknak van egy viszkózus lámpája, amelynek tengelye körbeteker. Az egyszerűség kedvéért nézzük meg az SG-90 hobbi-szervo hajtást (1. ábra), amelyet aktívan használnak a robotok és más repülõ vagy repülõ mechanizmusok kezdeti modelljeinek létrehozására. Hobi-servodrive, a vіdmіnu vіd ії promislovy, istotno kevesebb, mint rozmіry, kevésbé fejlődik susilla, más módon cheruєtsya, de a dії elve mögött teljesen azonos a promislovy iker.
Malyunok 1
A hobbi-szervo hajtáshoz való csatlakoztatás a 2. ábrán látható. Elektromos motor, hajtómű fogaskerekes készlettel, potenciométer (amely vezérli a forgókar helyzetérzékelőjének funkcióját), egy elektronikus vezérlőkártya az elektromos motorhoz és egy ház, amely az egész helyet lefedi, belép a raktárba. Ezen a kis bizonyítékon tartják őket, valamiféle szervohajtás segítségéért dédelgetik. A bor 3 magból áll: evés „plusz”, evés „mínusz” és vezeték, amely jelet ad az irányításra. A hobi-servo különböző modelljein a dartsok eltérő színűek lehetnek. Ale, praktikus a fekete színekhez „plusz” megélhetést, a feketékhez „mínusz” élénk vezetéket beállítani. A jeljelekre (fontos jelek továbbítására) nincsenek egyértelmű színszabványok. Különböző típusú szervohajtások esetén a jelvezeték lehet fehér, narancssárga vagy sárga.

Malyunok 2
A keruvannya esetében az ilyen motorok a szabványos keruyuchy jelet alkalmazták. Vin állandóan ismétli az impulzusokat, ahogy mondjuk, alacsony impulzusokat (3. ábra). Ezeknek az impulzusoknak a frekvenciája állandóan állandósul, és 50 Hz lesz. Gyere ki, mi az az időtartamimpulzusok (óra a susidnіh impulzusok vezető élei között) 1s/50 = 0,02 másodperc, azaz 20 ezredmásodperc lesz.

Baba 3
Mi ez, a szervo hajtás kimenő tengelyének felső helyzete az adott impulzus trivalitására van beállítva. A pontosítás kedvéért a kis 4-es az impulzusszélesség körülbelüli sebességét mutatja óránkénti koordinátákban és a szervotengely fordulatszámát. A szervotengely forgásszabályozása további trivalitás impulzusoktól függ 1-2 ms (ezredmásodperc) tartományban.

Malyunok 4
Amint az a grafikonon látható, a szervohajtás vezérléséhez semmi mást nem használnak az impulzusszélesség-moduláció - PWM - jeleként. Hogy milyen WIM, az a honlapunk vonatkozó statisztikáiból megtudható.
És hogyan változik az impulzus szélessége a vágott tengelyen a kilépésnél?
A kis 2-höz hozzárendelt módon a szervohajtás háza egy elektronikus motorvezérlő modullal is rendelkezik. A szervóhoz küldött jel a táblára kerül. És azok tengelye, amelyek ezzel a távoli jellel láthatók, a kicsi 5 blokkdiagramján látható, amelyet lépésről lépésre elemezünk. A bőrstádiumot téglalappal vagy körrel ábrázolják, számozzák. Használja ezeknek a téglalapoknak a közepét a kiterjesztés képén, amelyen a jel átalakítása történik.

Malyunok 5
Később a PWM modulációval ellátott Spr bemeneti vezérlőjel egy speciális logikai elemekkel ellátott mikroáramkörbe érkezik, aminek segítségével Upr feszültségre konvertálják (1. fokozat). Az első Ucontrol (teljesítményfeszültség) jel után meg kell találni az azonos feszültségű elemet. Ezt az elemet összeadónak nevezik, de valójában az Ucontrol bemeneti jelből származó hiba az Uobr feszültséget mutatja (a visszatérő kapcsolat feszültsége), amelynek a visszatérő ágon keresztül kell jönnie a váltóellenállásból (2. fokozat).
Kiskereskedelmi Ukorr (korrekciós feszültség), ami kijött, a sofőr próbálja (3. fokozat) és betáplálja a villanymotort. A motort megfordítják (4. fokozat) és a kimenő tengelyt rákapcsolják a szervo hajtásra, és ezzel egyidejűleg a tekercsérzékelőt csatlakoztatják a potenciométerhez. A potenciométer gomb becsavarásakor a feszültség változik és kilép, így a tengely forgása az Uobr feszültségre változik (5. fokozat). A feszültség Uobr kiegyenlítődik (új fokozat No. 2) az Uupr feszültséggel, és a különbség úgy néz ki, Ukor ismét megy a tápegységre (3. fokozat) és így tovább. A lancetával való „séta” jele a forgó harangtól az ébredésig tartó óráig Utr = Uobr. Ekkor az Ucor egyenlő lesz 0-val, és a motor zörög. Szükséges lesz, ha a szervotengely pozícióban van, mit mond a bemeneti jel, mi fogja vezérelni a Supr-t.
Uzagalny bajusz. A szervo hajtótengely mechanikusan kapcsolódik a potenciométer fogantyújából. A szervohajtás ugyanazon fordulatával a potenciométer a tengelyre forog, aminek következtében az opir és a kimeneti feszültség Uobr megváltozik. Nyilvánvaló, hogy az Uobr potenciométer kimeneti feszültsége közvetlenül a szervohajtás elfordulásának irányába esik. Egyórás bemeneti Supr szervohajtás jel, 0,001 és 0,002 másodperc közötti impulzusok trivalitásával, és beállítja a Vupr feszültségszintet, mivel meghatározza, hogy melyik szervo hajtótengely a hibás az elfordulásért. A villanymotor Zupinka pillanatnyilag, ha maga a szervo hajtótengely a kívánt helyzetben van, eléri az Uobr irányjelző Uvezérlő jelét. A 3-as fokozat erősítője pedig azért szükséges, hogy a villanymotorra erős feszültséget vezessenek, és a motor tengelyét a maximális fordulatszám-beállítással a szervohajtásra mozgassa.
Szervomotorral kenje fel a keruvannyát
Mint fentebb említettük, a szervomotor vezérléséhez a PWM a fő paraméterekkel van beállítva. Különböző módokon generálhat ilyen PWM-et. Mutassuk meg tetteiket.
1. Szervomotor vezérlés 555-ös időzítő segítségével . Az 555-ös időzítő chip impulzusgenerátor módban használható (a mikroáramkörről szóló jelentésért olvassa el a kapcsolódó cikket). Lehetőség van a robot mikroáramkör olyan paramétereinek megválasztására is, hogy láthassa a számunkra szükséges impulzusokat. Az impulzusok térközének megváltoztatásának módja, azaz az impulzusok trivalitásának módosítása 0,001-ről 0,002 másodpercre, a szervotengely forgását állítjuk be.
A PWM jel megvalósításához állandó, 50 Hz-es frekvencián szabályozott impulzustávolságú áramkört kell használni. A sémában (6. ábra) szereplő komponensek paraméterei olyan sorrendben vannak megválasztva, hogy biztosítsák a lelki biztonságot. De ha a cheruvannya jele minden elmét megtetszik, meg kell fordítani. A tranzisztor az áramkörben a legszükségesebb. Schob keruvati sparuvatistyu a határok feladataiban, buv bi potenciométer szükséges maximum 20 kOhm opirhoz. Két 10 kΩ-os potenciométert vikorálunk (ugyanolyan potenciométerek skalárjai az Evolvector 1. szintjének Main készletében vannak, ahol állítólag le van írva a séma. A szervomotor üzemi fordulatszáma 180 fok legyen. A szervo hajtás fokokat fog forogni, és további csomagoláshoz - 90 fok a másikon.

Malyunok 6
További információkért tekintse meg a sémát, és válassza ki saját maga, megvásárolhatja az 1. szintű Evolvector Basic készletét.
2. A szervomotor vezérlése a vezérlő segítségével. W lehetőség van a szükséges PWM jel generálására egy további vezérlővel is. Például módosíthatja a vezérlő programozását az Arduino platformon. A szervomotort vezérlő algoritmus (PWM-generálás) programozásának maximális leegyszerűsítése érdekében késleltetésnek kell lennie a könyvtáraknak nevezett programok írásában. A csatolmányok összehajtogatott programkódja a koristuvach-ból, csak a könyvtár fő programunkhoz való kapcsolódása esetén lehetséges rövid parancsok segítségével a függvények gyorsbillentyűit használni. Mindent egy algoritmikus nézet segítségével kell megtenni az ilyen csatolások, például egy szervomotor, a lehető legegyszerűbben és legegyszerűbben.
Csatlakozási séma, valamintAz Arduino szervomotor vezérlő keruvannya vázlata (programja) kevés 7-et mutat.
Malyunok 7
UVAGA: A szervomotor élettartamát nem szükséges közvetítő nélküli fizetéshez kötni, mint egy csikk (7. ábra). Van egy szervomotorunk a „mini” kategóriából egy kis csatlakozásra, aminek már van egy kis patakja, amin keresztül rendszeresen feldolgozzák a borokat, közvetítő fizetés nélkül esznek. A szabványos méretű szervó nagyobb nyomást igényel, ami a vezérlő túlmelegedését okozhatja. Az élő dvigunіv sіd zdіysnyuvati csatlakoztatása ritkán történik az okreme dzherelo-n keresztül, különösen, mivel azt a szervohajtások egyszerre továbbítják.
#beleértve<Szervo .h>- Ez a parancs a könyvtár kapcsolását jelenti a szervo meghajtó általi forgatáshoz. Ez a könyvtár az Evolvector lemezen található, amelyet más szintű készleteinkkel együtt szállítunk. Megtalálható az interneten is, és elhelyezhető az Arduino IDE "könyvtárak" mappájában.
A könyvtár nagyszámú parancshoz kapcsolódik, csak a programban győztesek láthatók.
Szervo meghajtás; - tse goloshennya változás speciális típusú. mozog- tse változás (elég választom a nevet). Szervo- a változás típusa (speciális típus, amelyet a csatolt könyvtár állít be). Legfeljebb 12 szervotípust telepíthet akár 12 szervo vezérléséhez. Vagyis elmondtuk a testületnek, hogy van egy szervohajtásunk, amit fel is hívtunk mozog.
mozgat.csatol(9);- ez a parancs azt jelenti, hogy a szervo-meghajtó ( mozog) 9 tűig érkezik (visnovka).
move.write(90); - tsya parancs zmushuє szervodrive ( mozog) fordítsa meg a középső pozícióban (90 fok).
move.write(0); - Fordítsa a szervót 0 fokra.
dvig.write(180); - Forgassa el a szervót 180 fokkal.
Megtudhatja, mit jelent a programsorok megváltoztatása a weboldalunk oldalán, vagy a főasszisztensek felismerése, a raktárba való belépés módja
Ebben a cikkben a szervo meghajtókkal foglalkozunk: azok csatolásaival, felismerésével, szervovezérlésével, szervohajtáshoz való csatlakoztatásával, különféle szervohajtásokkal és azok csatlakoztatásával. Kezdjük és tanuljuk meg, mi az a szervo.
A szervo megértése
A szervohajtás alatt leggyakrabban a villanymotoros mechanizmust értik, amelyet a feladatokban megfordításra és a helyzet csökkentésére kérhet. A kinevezésről azonban nem tudunk.
Pontosabban fogalmazva, a szervo-meghajtású - tse meghajtók s keruvannya egy negatív forgó linken keresztül, amely lehetővé teszi, hogy pontosan keruvati paramétereket ruhu. A szervohajtás bármilyen típusú mechanikus hajtás, amelynek a raktárban lehet egy érzékelője (pozíció, fordulatszám, fordulatszám, stb.) és egy hajtásvezérlő egység, amely automatikusan beállítja az érzékelőn a szükséges paramétereket, és beállítja a kívánt értékeket.
Más szavakkal:
A szervo a bemeneten átveszi a vezérelt paraméter értékét. Például kut turn
A keruvannya blokk ugyanazt az értéket egyezik meg a saját érzékelőjének értékeivel
Az igazítás eredménye alapján ki kell rabolni a napot, pl.: fordítani, gyorsítani vagy növelni, hogy a belső érzékelő értéke közelebb kerüljön a szabályozott külső paraméter értékéhez
A legszélesebb körű szervohajtások a vágási és szervo hozzárendelések levágására az adott tekercselési sebesség javítása érdekében.
Az alábbiakban egy tipikus hobbi-szervovezérelt kép látható.
Milyen fokozaton hajtják a szervót?
Rögzítés a szervóhoz
A szervomotorok képesek a raktári alkatrészek permetezését elvégezni.

Privid - villanymotor sebességváltóval. A villanyszerelő mechanikus fordulattá alakításához szükséges elektromos motor. A dvigun csomagolásának svédsége azonban túl nagy a gyakorlati csavaráshoz. A szélesség csökkentésére csökkentő: forgatónyomatékot továbbító és átalakító hajtómű.
Bekapcsolva azt a villanymotort, be lehet tekerni a kimenő tengelyt - a szervohajtás végfogaskerekét, amelyre ráerősítheti, melyiket akarja forgatni. Prote, hogy a helyzetet a melléklet szabályozza, szükséges bejelentő érzékelő - kódoló, amely visszaváltja a kanyart elektromos jelzésre. Amihez gyakran használnak potenciométert. A potenciométer gombjának elforgatásakor a támaszték a fordulattal arányosan változik. Ebben a rangban a jóga után egy egyszerűsített mechanizmust telepíthet segítségül.
A szervohajtásban a villanymotor, a reduktor és a potenciométer krimje egy elektronikai töltelék, mivel ez egy megfelelő paraméter vételétől, a potenciométer értékének leolvasásától, a motor be-/kikapcsolásától függ. Vaughn és vіdpovіdaє a pіdtrimku negatív zvorotnogo zv'yazku számára.
Három dartot húznak a szervóhoz. Közülük kettő a motor élettartamát szolgálja, a harmadik pedig vezérlő jelet ad, ami győztesen állítja be az épület helyzetét.
Most nézzük meg, hogyan kell vezérelni a hívás szervót.
Szervo vezérlés. A kulcsjelek interfésze
Annak érdekében, hogy a szervo a szervó helyzetét mutassa, egy bizonyos jelet kell küldeni a szervónak. Keruichiy jel - állandó frekvenciájú és változó szélességű impulzusok.

Aki pozícióban van, az megfoghatja a szervohajtást, lefekhet az impulzusok levegőjére. Ha a jel a vezérelt áramkörből érkezik, akkor az impulzusgenerátor benne vibrálja az impulzusát, melynek érvényességét a potenciométeren keresztül mérjük. A séma második része két impulzus trivalitásának kiegyenlítése. Mint egy trivalitás, az elektromos motor is játékba lép. Ez közvetlenül jelzi a burkolóanyagot, amely a legrövidebb impulzus. Amint az impulzusok megerősödnek, az elektromos motor megszólal.
Leggyakrabban a hobbi szervókban az impulzusok 50 Hz-es frekvencián rezegnek. A Tse azt jelenti, hogy az impulzus 20 ms-onként vibrál és érkezik. Hangolja meg az impulzus trivalitását 1520 µs-nál, ami azt jelenti, hogy a szervohajtás hibás a középső pozícióban. Növelje vagy módosítsa az impulzust, hogy a szervohajtást az év nyíl utáni fordulatba küldje, vagy a nyíl ellenkező iránya nyilvánvaló. Melyikkel az impulzus felső és alsó inter-trivalitását használjuk. A zár mögött található Arduino szervokönyvtárának impulzusértéke a következő: 544 µs 0°-hoz és 2400 µs 180°-hoz.
Kérjük, vegye figyelembe, hogy az Ön mellékén a gyári beállítások eltérhetnek a szabványos beállításoktól. Deyakі szervo meghajtó vikoristovuyut impulzusszélesség 760 μs. A középső pozíció 760 µs, hasonlóan a nagyobb szervók átlagos 1520 µs pozíciójához.
Tehát a varto azt jelenti, hogy többé-kevésbé zagalnopriynyati dozhini. A Navit a szervohajtás egy és ugyanazon modelljének keretein belül befolyásolható, ami változékonyság esetén megengedett, hogy a dozhin működési tartománya és az impulzusok megszakadjanak. A precíz robotikához egy adott szervohajtás kalibrálható: kísérletezéssel kell kiválasztani a megfelelő tartományt, ami az újra jellemző.
Több háborúért, hogy tiszteletet adjon, akkor szóhasználatban egy szélhámosnak. A szervók kezelésének módját gyakran PWM / PWM-nek (impulzusszélesség-moduláció) vagy PPM-nek (impulzushelyzet-modulációnak) nevezik. Nem így van, és ezeknek a módszereknek a megválasztása balszerencsét hozhat. A helyes kifejezés a PDM (Pulse Duration Modulation). Egy újnál nagyon fontos az impulzusok hossza, megjelenésük gyakorisága nem annyira. Az 50 Hz a norma, de a szervo-hajtású gyakorlati idő 40, і 60 Hz esetén megfelelő. Anyai influenza esetén csak olyanokra van szükség, amelyek a vénák gyakoriságának erős változásával feszültségcsökkenéssel, erős frekvenciafüggőséggel (például 100 Hz) tudnak működni. , túlmelegedhetnek és kibillenthetik a hangot.
A szervó jellemzői
Most nézzük meg, milyenek a szervók, és hogyan bűzhetnek a jellemzők.
Nyomaték és fordulási sebesség
Beszéljünk a szervohajtás két másik fontos jellemzőjéről: fordulópontén pro fordulási sebesség.
Az erőnyomaték vagy az elfordulási nyomaték egy vektorfizikai mennyiség, amely hozzájárul a tekercselés tengelyén keresztül az erő jelentési pontjáig húzott sugárvektor hozzáadásához az erővektorhoz. Jellemezze az erőnek a szilárd testre gyakorolt nyílt hatását!

Egyszerűbbnek tűnik, de a karakterisztikája azt mutatja, hogy az épület szervohajtásának milyen fontos előnye van a megnyugvásban egy fontos napon. Ha a szervohajtás elfordulási pillanata 5 kg × cm, akkor ez azt jelenti, hogy a szervohajtás vízszintes helyzetben 1 cm-rel csökken a vázán, és 5 kg-ot emeltek a vilny végén. De ami egyenértékű, fontos, hogy 5 cm-rel növeljük, akár 1 kg-ig.
A szervohajtás sebességét egy órás intervallum szabályozza, ez kell ahhoz, hogy a szervohajtás 60°-kal elforduljon. A 0,1 s/60°-os karakterisztika azt jelenti, hogy a szervo 0,1 s alatt 60°-ot elfordul. A fordulatszámot a nagyobb változóban, fuvolánkénti fordulatszámban nem könnyű kiszámítani, de előfordult, hogy a szervohajtások leírásánál a leggyakrabban ilyen egyet számolnak.
A Varto azt jelenti, hogy néha kompromisszumot kell kötni két jellemző között, ha egy kiváló szervo hajtást akarunk, ami nagy jelentőséget mutat, akkor mi vagyunk a hibásak, de készen állunk, hogy ez a telepítés rendesen forogni tudjon. És ha egy svéd szellemet akarunk, akkor könnyű lesz kivezetni a féltékenység helyzetéből. Ha egy és ugyanazt a motort cserélik, az egyensúlyt a sebességváltóban lévő fogaskerekek konfigurációja határozza meg.
Nyilvánvaló, hogy mindig megtehetjük a telepítést, amely nagy igénybevétellel spozhivaє, smuk, zokogás її jellemzői elégedett fogyasztók.
Formafaktor
A szervo meghajtók mérete eltérő. Annak ellenére, hogy nincs hivatalos besorolás, a gyomnövényeket régóta nyírják nagyszámú rozmіrіv іz galnopriynym rozashuvannyam krіpilnyh elementіv. A Їх a következőkre osztható:
kicsi
alapértelmezett
Egyszerre bűz van, annyira jellegzetesek a méretek:
Léteznek úgynevezett „speciális típusú” szervohajtások is, amelyek méretei nem mennek fel a besorolási kategóriába, de több száz ilyen szervohajtás még kisebb.
Belső interfész
A szervo meghajtók analógok és digitálisak. Akkor miért vannak erők, előnyök és hiányosságok?
A bűzhangokat semmi sem zavarja: villanymotorok, váltók, potenciométerek ugyanazok, a bűzt csak a belső kerámia elektronika zavarja. A digitális iker analóg szervohajtás speciális mikroáramkörének cseréje mikroprocesszoros kártyán támogatható, amely impulzusokat vesz, elemzi és motorral vezérli. Ily módon a fizikai vikonannіnі vіdminnіst kevésbé az impulzusok és a görbületek motor általi feldolgozásának módjában.

Az ofszet típusú szervohajtások ugyanazokat az impulzusokat kapják a vezérléshez. Ezt követően az analóg szervohajtás döntést hoz a helyzet megváltoztatásáról, és különböző időpontokban jelet küld a motornak. Vіdbuvaetsya tse zazvichay іz frekvencia 50 Hz. Ebben a sorrendben 20 ms szükséges - ez a minimális reakcióóra. Ebben az órában a be-yak ovnishnya diya zdatna megváltoztatja a szervo helyzetét. De csak egy probléma van. Nyugodt állapotban nem kap feszültséget a villanymotor, kis lélegzetvétel esetén az alacsony feszültség rövid jelét adják a villanymotorra. Minél több a levegő, annál erősebb a jel. Ily módon kis szervohajtásokkal nem lehet gyorsan beburkolni a motort, vagy nem lehet nagyszerű pillanatot kifejleszteni. A „holt zónák” óráról órára rendeződnek.
Ezeket a problémákat a vétel frekvenciájának növelésével, a jel feldolgozásával és elektromotoros megoldásával lehet kiküszöbölni. A digitális kiszolgálómeghajtók egy speciális processzort használnak, amely vezérlőimpulzusokat vesz, feldolgozza és jeleket küld a motornak 200 Hz vagy annál nagyobb frekvenciával. Ki kell derülnie, hogy az épület digitális szervohajtása jobban reagál a hívásokra, jobb a szükséges sebességet és a fordulási pillanatot kialakítani, és ezért érdemes az adott pozíciót trimmelni, ami jó. Zvichayno, mely borokkal több áramot takarít meg. Ezenkívül a digitális szervo meghajtók gyárilag összecsukhatók, és a költségek sokkal drágábbak. Vlasne, tsі két nedolіki - minden mínusz, yakі є digitális szervo meghajtókban. Egy műszaki tervben a bűzt folyamatosan felülírják az analóg szervók.
A felszerelés anyagai
A szervohajtások fogaskerekei különböző anyagokból készülnek: műanyag, szén, fém. Minden bűz széles körben vikoristovuyutsya, úgy dönt, hogy hazudnak a konkrét feladatokat, és az a tény, hogy a jellemzők szükségesek a telepítés.

A műanyag, többnyire nylon fogaskerekek könnyűek, nem gyengék a kopás, szervókban a legszélesebbek. A bűzök nem mutatnak nagy hiúságot, de a hiúság még kicsi, akkor a nylon fogaskerekek a legjobb választás.
A karbon fogaskerekek nagyobbak, mint a régiek, gyakorlatilag nem kopnak, egyidőben a nylon fogaskerekekkel. A fő hiányosság az út.
Fém fogaskerekek a legfontosabb, anti-bűz vitriumuet maximális navantazhennia. Befejezni a shvidko znoshuyus, hogy történik minyati shirnі praktikus bőr szezonban. A titán fogaskerekek a kedvencek a fém fogaskerekek között, mind műszaki jellemzőik, mind ár szempontjából. Sajnos a bűz sokba fog kerülni.
Kollektor és kefe nélküli motorok
Háromféle szervomotor létezik: normál magmotor, mag nélküli motor és kefe nélküli motor.

A magos primer motor (jobbos) tömör magos rotorral van felszerelve fa tekercseléssel és mágnesekkel az oldalán. A forgórésznek lehet néhány szekciója, így ha a motor becsavarodik, a forgórész a mágnesen áthaladva kismértékben vibrál a motor lengésétől, és ennek eredményeként egy szervo hajtás jön ki, ami vibrál és kevésbé pontos, alacsonyabb szervohajtás mag nélküli motorral. Az üres rotorral (levoruch) rendelkező motornak egyetlen mágneses magja lehet, a mágnes körül henger vagy gyűrű formájában tekercselve. A mag nélküli szerkezet a vag mögött könnyebb és nem tartalmaz szakaszokat, ami folyékonyabb és egyenletesebb rezgésmentes munkát eredményezhet. Az ilyen motorok drágák, de a bűz nagyobb fokú irányítást, nyomatékot, amely beburkol, és sebességet egyenlő arányban biztosít a szabványosokkal.

Nemrég jelentek meg a kefe nélküli motorral szerelt szervóhajtások. Az előnyök ugyanazok, de a többi nem kollektoros motornál: nincs pajzs, ezért a bűz nem hoz létre ópiborítást és nem kopik el, a sebesség és a nyomaték nagyobb, ha egyenlő kollektoros motorokhoz áramlik. A kefe nélküli motorral szerelt szervohajtások a legdrágább szervohajtások, de ezzel a büdösséggel jobb tulajdonságokkal lehet összehasonlítani a más típusú motorokkal rendelkező szervohajtásokat.
Csatlakozás Arduinohoz
Sok szervó közvetlenül csatlakoztatható az Arduino-hoz. Melyik típushoz tartozik egy három dartból álló vonat:
chervoniy - evés; csatlakozik az 5V-os érintkezőhöz vagy közvetlenül a tápegységhez
barna vagy fekete - föld
sárga vagy fehér - jel; csatlakozik az Arduino digitális kimenetéhez.
Az Arduino csatlakoztatásához manuálisan csatlakozzon egy portbővítő kártyához, például a Troyka Shieldhez. Ha további vezetékeket szeretne, csatlakoztathatja a szervót a kenyérpanelen keresztül vagy közvetlenül az Arduino érintkezőkhöz.
Erőteljes impulzusokat generálhat önállóan is, de a padló szélesebb, mint a gyári, az egyszerűség kedvéért van egy szabványos Servo könyvtár.
Ételkínálat
A tökéletes hobbiszervo-vezérelt robotóra 100 mA felett fut. Amivel az Arduino, akár 500 mA-t is láthat. Ezért, ha szűk szervohajtást kell használnia a projektben, akkor érdemes elgondolkodni azon, hogy a kiegészítő evés során ezt az áramkörben látjuk.
Nézzük meg a 12V-os szervocsatlakozó csonkját: 
Cserélje ki több csatlakoztatott szervo meghajtóra.
A legtöbb Arduino táblán a Servo könyvtár legfeljebb 12 szervót kezel, az Arduino Mega esetében ez a szám 48-ra nő. 9-en nem lehet legyőzni az analogWrite() függvényt, és a 10 érintkező független, ráadásul a szervók csatlakozik ezekhez az érintkezőkhöz. Akár 12 szervót is csatlakoztathatunk az Arduino Megához a PWM / PWM funkció megzavarása nélkül, nagyobb számú szervónál nem tudjuk megnyerni az AnaWrite ()-t a 11-es és 12-es érintkezőkön.
Szervo könyvtár funkció
A Szervo könyvtár lehetővé teszi a szoftverek szervo meghajtókkal történő vezérlését. Akinél a tekercselés Szervo típusúra cserélődik. A következő funkciók kezelik:
attach() - váltson át egy adott pinre. Ennek a függvénynek két szintaxisa lehetséges: servo.attach(pin) és servo.attach(pin, min, max). Ennél a tűnél - annak a tűnek a száma, ameddig a szervohajtást alkalmazni kell, min és max - az impulzusok időtartama mikroszekundumban, 0°-os és 180°-os elfordulást követően. A záraknál 544 mikroszekundum és 2400 mikroszekundum látható.
write() - utasítja a szervót egy vagy több paraméterérték elfogadására. A támadó szintaxis a következő: servo.write(angle) , ahol a szög az, hogy a szervo hogyan tud elfordulni.
writeMicroseconds() - parancs küldése az utolsó parancs szervo-impulzusára, amely az előremutató parancs alacsony analógja. Előzetes szintaxis: servo.writeMicroseconds(uS) , ahol uS az impulzus hossza mikroszekundumban.
read() - Olvassa el pontosabban a kuta értékét, amelyben a szervo ismert. Az offensive szintaxisa a következő: a servo.read() az egész értéket 0-ról 180-ra forgatja.
csatolt() - újraellenőrzés, a chi hozzáadásával egy adott PIN-kódra vált. Támadás szintaxis: servo.attached() , a logikai igazság el van forgatva, mintha a bulát megváltoztatták volna valamire, vagy hülyeség az ellenkező irányba.
detach() - megjavít egy okiratot, egy reversal attach() , így megváltoztathatja a tűt, amelyhez a bula hozzá van rendelve. Speciális szintaxis: servo.detach().
A Servo2 könyvtár összes metódusa a Servo metódusokkal működik.
Alkalmazott szervókönyvtárak
Uz'yaznennya helyettes
A szervóhajtások különbözőek, van, amelyik jobb olcsóbb, van, amelyik jobb pontosabb. Először is, hogyan vegyél egy uvazon szervodrive-ot, varto anyát, ami nem biztos, hogy a jobb tulajdonságok anyja, a projektedhez illő szmuk. Sok sikert a kezdeményezésekhez!
Szervodrive (meghajtó, hogy mit kell varrni)- Negatív irányjelző hajtás, amely lehetővé teszi a kanyar paramétereinek pontos szabályozását.
A szervohajtás bármilyen típusú mechanikus hajtás (tartozék, munkatest), amely tartalmazhat egy érzékelőt a raktárban (helyzet, sebesség, fordulatszám stb.) és egy hajtásvezérlő egységet (elektronikus áramkör vagy mechanikus összekötő rendszer), amely automatikusan beállítja a szükséges paramétereket a szenzoron nyitott, a melléképületen) nyitás a megadott értékre (a vezérlőgomb helyzete vagy más rendszerekben a számérték).
Anyag a Wikipédiából - ingyenes enciklopédia
Servodrive – a teljes hajtásrendszer, akárcsak a fordulatszám szabályozás széles skálájában, dinamikus, nagyáramú folyamatokat és jó ismételhetőséget biztosít. Tse rendszer, elismert vіdpratsyuvannya pillanat, swidkostі és pozitsії іz előre meghatározott pontosság és dinamika. klasszikus szervohajtás egy motorból, egy helyzetérzékelőből és egy vezérlőrendszerből áll, amely három vezérlő áramkörrel rendelkezhet (pozíció, sebesség és áramlás szerint).
A "servo" szó hasonló a latin "servus" szóhoz, amely szolgának, rabszolgának, segítőnek szól. A gépházi galuzáknál a bűz fontosabb volt, mint a kiegészítő hajtások (meghajtás a munkapadoknál, a robotokat vékonyra hajtani). Idén azonban megváltozott a helyzet, most a legjobb szervotechnológiával valósítják meg a főbb vezetékeket.
Az adott órában szervók zastosovuyutsya ott, de a pontosság hiánya a legfontosabb ipari feldolgozási frekvenciák szabályozásában. Magas hozamú stagnálás szervo hajtások A magas termelékenységhez szükséges, a fő kritérium a termelékenység. Szervo hajtások precíziós rendszerekkel kell felszerelni az ipari robotok sebességszabályozására és pozicionálására, valamint a nagy pontosságú sokoldalúságra. szervók felszerelhető koordinátafúró padokra, különféle technológiai szállítórendszerekre, különféle segédszerkezetekre és egyebekre. szervók.
Egyetemes szervohajtás
Egyetemes szervohajtás gazdag funkciókészlettel, a különböző típusú szervomotorok (szinkron és aszinkron) vezérlésének képességével, a forgási hang különböző érzékelőivel való munkavégzéssel, valamint számos lehetőséggel és bővítéssel. Érezhetően univerzális Szervodrive a fenéken KEB F5-Multi (Nimechchina) és Control Techniques Unidrive SP. (Anglia)
Szervodrive a KEB F5-Multi alapján
Szervo KEV" align="RIGHT" width="20%" border="0">Az elektromos hajtás vezérlője a reverzibilis link áramkörével szinkron és aszinkron motorokhoz. Kifejezetten zárt körben történő munkavégzéshez, lehetséges opciók a forgatható csatlakozáshoz:
megoldó
kódoló
Sin-Cos kódoló
abszolút kódoló
EnDat, Hiperface vagy tachogenerátor
Főbb képességek és jellemzők:
feszültségek széles skálája
feszültség 220 vagy 380 V
állandó dörömböléssel lehet élni
érzékelő nélküli keruvannya dvigun
galvanikusan elválasztott analóg és digitális bemenetek/kimenetek
relé és tranzisztor programozási kimenetek
A decentralizált ellátás koncepciója megvalósítható a láthatóság növelésének rendszerével:
fordulatszám-tekercselés és nyomaték szabályozása
pozíciókezelés
kényelmes csomagoló mód
Cam kapcsolók
Elektronikus cam lemez
Egytengelyes pozicionálás
A lemezjátszó helyzete
Minden meghajtó támogatja a következő interfészeket: Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet és KEB-HSP5/DIN 66019-II.
Vikonavchiy és különleges Szervodrive
Vikonavchiy szervopriod pratsyuє pіd kruvannyam ruhu vezérlő, maє obrazheniya nabіr funktіy nalashtuvan, egyszerű a robot számára. Ezért a vikonavchy szervohajtás gazdaságosabb. Nézzük a vikonavchit szervók a szinkron fenekén szervo hajtások mecapion.
Vikonavchi szervohajtás Mecapion

Szinkron szervók A Mecapion (pl. Metronix) az ipari automatizálás területén alkalmazott rendszermegoldások alapterméke, amely régóta ismert az orosz állampolgárok számára.
Főbb jellemzői szervo hajtások Metronix
feszültségtartomány 0,03-11 kW
rekuperátor készlet van felszerelve, amely lehetővé teszi az energia mértéké alakítását, a kulcs pedig az energialedobó kulcs dinamikus horganyzás során
teszt üzemmódban
a vibráció használatának funkciói, amikor a motor be van csomagolva, és a jógafogak lehetővé teszik a robot kikapcsolását, a frekvenciát megváltoztatva a melléküzemmódban, mind terheléskor, mind működés közben
külső és abszolút inkrementális helyzetérzékelők használatának lehetősége
válassza ki a robotvezérlő rendszer módját - sebesség vagy pillanatnyi szabályozás
A kibővített szoftvercsomag jelenléte lehetővé teszi a frekvenciaváltoztatás és -váltás funkcióinak könnyű megváltoztatását különféle műszaki feladatok alapján (beleértve az előtolás hajtások vezérlésének megvalósítását is)
az üres tengelyű motorok Metronix termékcsaládjának jelenléte lehetővé teszi a közbenső rögzítés kikapcsolását a kinematikai sémából - jó tengelykapcsoló
A bármikori programozás lehetővé teszi, hogy a rendszer magas szintű védelemmel működjön különféle vészhelyzetek esetén és maximális információval a kezelő számára
A VS sorozat egy szabványos fűtési rendszer, amely szabályozza a fordulatszámot, a nyomatékot (±10 V) és a pozíciókat (lépés/irány).
A VS sorozat frekvenciáinak változtatása a következő módokban működhet:
pozíció megváltoztatása másik vezérlő kiválasztásakor, amely beállítja az impulzusok sorrendjét.
Az analóg bemenet vagy a diszkrét bemenetek biztonságának ellenőrzése.
az analóg bemenet nyomatékszabályozása maximális nyomatékcsökkentési módban.
ellenőrzése swidkistyu / pozíció.
keruvannya swidkіstyu / pillanat.
pozíció/pillanatváltás.
A VP speciális sorozatot speciális feladatok elvégzéséért ismerik el:
lineáris koordináta pozicionálás akár 64 pozíció kiválasztásának lehetőségével hat diszkrét bemenettel (VP1), tipikus megállási terület – lineáris mozgást biztosít a golyóscsavarokra történő áttétellel rendelkező rendszerekben
magas pozicionálás akár 32 pozíció kiválasztásával, öt különálló bemenet (VP2), tipikus beállítási terület - forgóasztalok, forgó szállítószalagok, automatikus szerszámcserélő felszerelése.
pozicionálás a betáplálás pozicionálása szerint a felhúzó (VP3) tipikus köre zastosuvannya - csomagológépek, mindenféle rögzítés, amely a pozicionáláshoz alkalmazható, mind a jeladó jele után a motor tengelyén , és a külső diszkrét érzékelő előjele után
programozható pozicionálás akár 8 program kiválasztásának lehetőségével három külön bemenettel (VP5), a skin program akár 100 pozíció (pozíció) is lehet, melyek a kapcsolási frekvencia memóriájában tárolódnak
a VS frekvenciaváltó és a személyi (promislov) számítógép kommunikációjához a COM portot szükség esetén az RS232/RS485 átalakítón keresztül csatlakoztatjuk, a frekvenciaváltót egy
Integrációk Szervodrive
align="RIGHT" width="30%" border="0">A fejvíz rizs, valamint a legfontosabb prioritás, integrálva szervo hajtásє visnovok dvigun, vezérlő, érzékelő zvorotny zv'yazku és peretvoryuvach frekvencia egyetlen házban. Amit minimalizálni kell a szerelési műveletekkel, az egyszerű csatlakoztatás és beszerelés, a szerelési munka egy óra lerövidítése jelentős helyet takarít meg, és a vartostán is pozitívan nyilatkozik. szervo hajtás.
Az orosz piacon már azon kapták magukat, hogy jót tesznek maguknak, és a Crocodile hazai integrációját ajánlják szervók SPS.
zárlatos motorokhoz adaptált algoritmuson alapuló zökkenőmentes (vektor) vezérlés
magas dinamikus mutatók a zárt áramkörök ingadozására a fúvókák szabályozására a motor tekercseiben
a zárt kontúrok vikoristannyja swidkostban
alacsony rezgés a susilla fuvolánál, amely dinamikusan szabályozott
Jól átgondolt kialakítás és egyszerű telepítés
kompakt méret és kis tömeg
Robot módok szervo hajtás SPS
Dinamikus - a felső szint vezérlőjének jelét valós időben továbbítják egy digitális interfészen keresztül. A dinamikus mód a kontúresztergálást igénylő rendszerekben győzedelmeskedik (például a precíz pozicionálás érdekében összecsukható kinematikával és koordinátatáblázattal rendelkező manipulátorokban).
Analóg - swidk_styu jel átfordulása ±10 V. A dán mód lehetővé teszi a hajtás megfordítását az analóg rendszerek vezérlésének korszerűsítéséhez, vagy manuális átfordítást (például egy további kormánykerékhez).
Ciklikus - programozás a felső szint vezérlője által és a hajtás memóriájának mentése ciklikus műveletek esetén. Gyakran lehetőség van a vezérlőrendszer felső szintjének külső vezérlőjének kikapcsolására. A ciklikus mód például a szállítószalagokon és a kényelmetlen raktározási műveleteknél győzedelmeskedik.
Merezhevy – ez a mód lehetővé teszi a szervorendszer felosztását digitális CAN interfész alapján, több tengely szinkron vagy szekvenciális mozgásának megvalósítását. Ebben az üzemmódban a "mester-szolga" üzemmód is használható, amelyben a hajtás a hajtótengely helyzetének ismétlődő üzemmódjában működik.
A jelenlegi birtok konstrukcióinál, amelyek csúcstechnológiára épülnek, folyamatosan fejlődnek azok a különböző automatikus folyamatok. Közéjük tartoznak a széles szervohajtású cipők, amelyeket olyan építési módszerrel szerelnek fel, amely sok elemet és állandó dinamikus mozgást részletező részletet tartalmaz. Ezek a tartozékok állandó vezérlést biztosítanak a tengely fordulatai felett, szerelik fel a szükséges elektromechanikus szerelvényeket.
Ezeknek a rendszereknek a tároló részét szervomotorok alkotják, amelyek lehetővé teszik a csavarok óránkénti elforgatását a kívánt tartományban. Ily módon minden folyamat és folyamat periodikusan megismételhető, és ezeknek az ismétlődéseknek a gyakoriságát a vezérlőrendszer rögzíti.
Rögzítés a szervóhoz
A tipikus szervomotor főbb részei a forgórész és az állórész. A kapcsoláshoz speciális alkatrészeket szerelnek fel a csatlakozók és a kapocsdobozok láttára. A folyamatok kezelése, ellenőrzése és korrekciója egy jól karbantartott kritikus csomópont segítségével történik. A vimikannya szervo meghajtó vikoristovuetsya okrema rendszer javítása érdekében. Minden részlet a csarnok épületében található.
Gyakorlatilag minden szervo hajtásban van egy érzékelő, ami működik és ellenőrzi a paramétereket, mint például a helyzet, a susilla vagy a tekercselés sebessége. A gondozási blokk segítségére bevezetik a szükséges paraméterek automatikus üzemmódját a robotcsatolás során. A következő paraméter kiválasztása jelek jelenlétében történik, amely az érzékelőben található óraközönként.
A szervohajtás és a nagy villanymotor közötti különbséget az határozza meg, hogy a tengelyt pontosan a megadott pozícióba lehet beszerelni, mintha fokokban lenne. A pozíciót, valamint egyéb paramétereket a vezérlőegység támogatja.
A munka elve a mechanikusan átalakított elektromos energián alapul, villanymotor segítségével. Hajtásként a sebességváltó csavart, ami lehetővé teszi a tekercselés sebességének a kívánt értékre való csökkentését. A raktárba fogaskerekes tengelyt építek, ami átalakítja és továbbítja a nyomatékot.
Hogyan kell működni a szervo
A hajtómű kimenő tengelyének tekercselése, szervohajtású fogaskerekekkel összekötve, egy út köti össze az adott villanymotor fogainak indulásával. A reduktornak magának kell szabályoznia a tekercsek számát. A külső sánc a kikeményítéshez szükséges mechanizmusokkal, melléképületekkel összeköthető. A tengely helyzetét a lengőkar kiegészítő érzékelője, az elektromos jel fordulatának váltása és a teljes rögzítés működési elve szabályozza.

Ezt az érzékelőt kódolónak vagy potenciométernek is nevezik. Amikor megfordítod a futót, a jógaopír megváltozik. Cserélje ki a támasztékot úgy, hogy a jeladó fordulatának sarkával az egyenes arányos parlagon helyezkedjen el. A dán munkaelv lehetővé teszi a mechanizmusok megfelelő helyzetben történő felszerelését és rögzítését.
A Dodatkovo bőr szervomotornak lehet egy elektronikus kártyája, amely feldolgozza a külső jeleket, ami olyan, mint egy potenciométer. Dalí vykonuєtsya porivnyannya parametrіv, az eredményeket bármely zadіisnyuєtsya indítsa chizupinkka villanymotor. Később az elektronikus fizetés megkönnyítésére negatív visszaküldési linket adunk hozzá.

Három vezető segítségével szervomotort csatlakoztathat. Ezek közül kettő a villanymotorra van táplálva, a harmadik pedig a vezérlőjelek áthaladását szolgálja, ami a tengelyt a megfelelő helyzetbe hozza.
Lehetõség van a világ feletti dinamikus hajtás elõnyben részesíteni egy villanymotoron a sima gyorsulás vagy az ilyen sima horganyzás érdekében. Kinek összecsukható mikrokontrollerek vannak felszerelve, amelyek a munkaelem pontosabb irányítását és helyzetszabályozását biztosítják. A számítógép merevlemezét, mint egy fenéket, irányíthatja, ilyenkor a fejek egy további precíz meghajtóval a kívánt pozícióba kerülnek.
Szervo motor vezérlés
Ennek fő oka az, hogy a szervomotor képes legyen normálisan működni, ugyanúgy működjön az úgynevezett G-kód rendszerrel. Qi kód є tárcsázási parancsok egy speciális program kezeléséhez, könyvjelzővel való rögzítéséhez.
Csakúgy, mint a CNC - numerikus programvezérlés átvétele, akkor így a szervók kölcsönhatásba lépnek egymással. Vidpovidno az épület bűzének bemeneti feszültségének szintjéig változtassa meg a feszültség értékét a tekercselésen vagy az elektromos motor horgonján.

A szervomotor és a rendszer közbenső vezérlése nélkül egy hónap alatt történik - a vezérlőegység. Ha parancsra van szüksége az énekvonal X koordináta tengely mentén történő átadásához, a digitális analógban változtassa meg a sing érték feszültségét, hogyan találja meg a koordináta tengely élő meghajtását. A szervomotornál a forgócsavar körbefutó mozgása van, amely a jeladóhoz és a fő mechanizmus vezérlőszervéhez van kötve.
Impulzusok vibrálnak a kódolóba, amelyeket a szervót vezérlő blokk fokoz. A program bizonyos számú jelet küld az állomásra telepített kódolóból, hogy át tudjon menni a verőmechanizmuson. A kívánt órában egy analóg váltó, miután eltávolította a beállított impulzusszámot, nagy kimeneti feszültséget alkalmazott, ennek eredményeként a szervomotor zúg. Tehát az impulzusok beáramlása alatt a nyomás megváltozik, és az egész rendszer munkája megváltozik.
Lásd a jellemzőket
A szervomotorok különböző változatokban kaphatók, így különböző területeken is használhatók. A fő építmények gyűjtőkre és munkára szolgáló táblákra vannak felosztva, állandó és cserélhető szalag formájában.
Ezenkívül a bőr szervomotor lehet szinkron vagy aszinkron. A szinkron melléképületek beállíthatják a nagy pontosságú tekercselési sebességet, valamint ezt a gyors vágást és esztergálást. Qi hozza a svédet, hogy összegyűjtse a csomagolás névértékét. Az aszinkron viconannban lévő szervohajtásokat a vezérlő vezérli, módosítsa a folyam paramétereit, ha a frekvenciáját a segédinverter megváltoztatja. A legnagyobb pontosságú bűz mutatja az adott sebességet a legkisebb tekercseknél.

Az elvi sémától és a kialakítástól függően a szervohajtások lehetnek elektromechanikusak és elektromechanikusak. Az első opció, amely sebességváltót és motort tartalmaz, az alacsony sebesség kódja alá tartozik. Egy másik esetben a hengerben lévő dugattyút erősen fújja a rahunok.
A bőr szervohajtást a következő paraméterek jellemzik:
- Cool moment vagy zusilla, mi történik a tengelyen. A robotszervó legfontosabb mutatóját tekintjük. A feszültség skin értékénél van egy fontos momentum, hogy mit kell csavarni, mi van az útlevélben.
- Fordulási gyorsaság. Ez a paraméter egyetlen időtartam, amely a kimenő tengely helyzetének 600-kal történő megváltoztatásához szükséges. Ez a karakterisztikája egy adott feszültségértéktől is függ.
- A maximális forgácsolás, amely elfordíthatja a külső tengelyt. A leggyakoribb érték 180 vagy 3600 lesz.
- Minden szervó digitális és analógra van felosztva. A szervo vezérlés ugarnézete.
- A szervomotorok élettartama. A legtöbb vikorista modell feszültsége 4,8-7,2 V. Zhivlennya, hogy a menedzsment zdiisnyuetsya segítségével három útmutatók.
- Korszerűsítési lehetőség állandó burkolatú szervohajtásban.
- A reduktor anyaga változatos lehet. A fogaskerekek fémből, szénből, műanyagból vagy kombinált raktárakból készülnek. A belőlük készült bőrnek megvannak a maga előnyei és hiányosságai. Például a műanyag alkatrészek erősen vibrálnak az ütési igénybevételtől, de a próbaüzem során elhasználódnak. Fém fogaskerekek, navpak, gyorsan elhasználódnak, aztán a bűz lehet a nagy állóképességtől a dinamikus hiúságig.
A szervomotorok előnyei és hátrányai
A Zavdyaki méretek és bővítmények egyesítése könnyen és egyszerűen beépíthető bármilyen kialakításba. A bűz bezvіdmovnі és nadіynі, a belőlük származó bőr gyakorlatilag zajtalan, ami nagy jelentőséggel bír az összecsukható és a vіdpovіdalnyh dallyanka működésében. Alacsony sebességgel navigálva pontosságot és egyenletes mozgást érhet el. A szervóhajtású bőrt a személyzet állíthatja be, csendes chi іnshih feladatok esetén parlagon.
Ahogy nedolіki vydnachayutsya sevnі skladnostі, amikor nalashtuvannyah hogy porіvnyano vysoka vartіst.