Робот-пилосос своїми руками: опис і характеристики схеми збірки. Робот-пилосос своїми руками: опис і характеристики схеми збірки.
здатний сам переміщатися по кімнаті, об'їжджати перешкоди, а також збирати сміття. Для полегшення конструкції і простоти збірки в якості матеріалу для основи використовується картон.

Матеріали і інструменти для виготовлення:
- щільний картон (потрібно багато шматків);
- arduino (автор використовував аналог за 210 р.);
- невелика макетке вартістю 80 р .;
- два ультразвукових далекомір (вартість 300 р.);
- контролер моторчиков (80 р.);
- два мотор-редуктора з колесами (300 р.);
- блок акумуляторів з контролером заряду на 18 В;
- кілька метрів кручений пари;
- турбіна від старого пилососа;
- кулер від комп'ютера.
Процес виготовлення:
Крок перший. Створюємо поворотну платформу для робота
Для своєї першої саморобки автор використовував танк з гри "Танковий бій", з іграшки були викинуті всі зайві деталі, залишився тільки корпус, а також двигуни і колеса. Після цього був встановлений Arduino UNO, драйвер двигунів і ультразвукової далекомір. Як джерело живлення використовувалися три літієві батареї по 3.7 В.
Така конструкція мала ряд мінусів. Наприклад, через те, що колеса знаходилися позаду платформи, у робота виникали проблеми при повороті, робот часто буксував.
Також через дуже великій швидкості пересування робот часом не встигав реагувати на сигнали далекоміра і врізався.


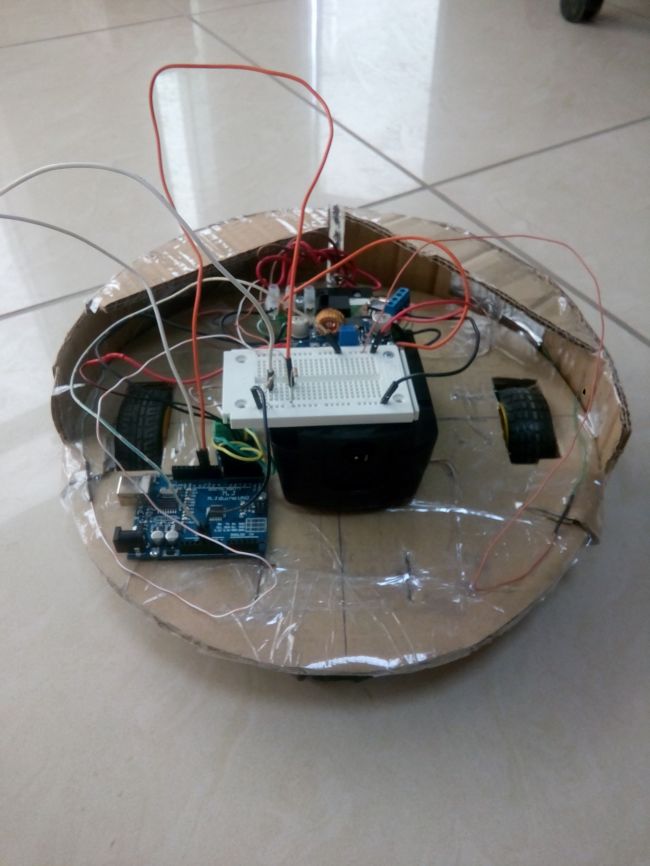
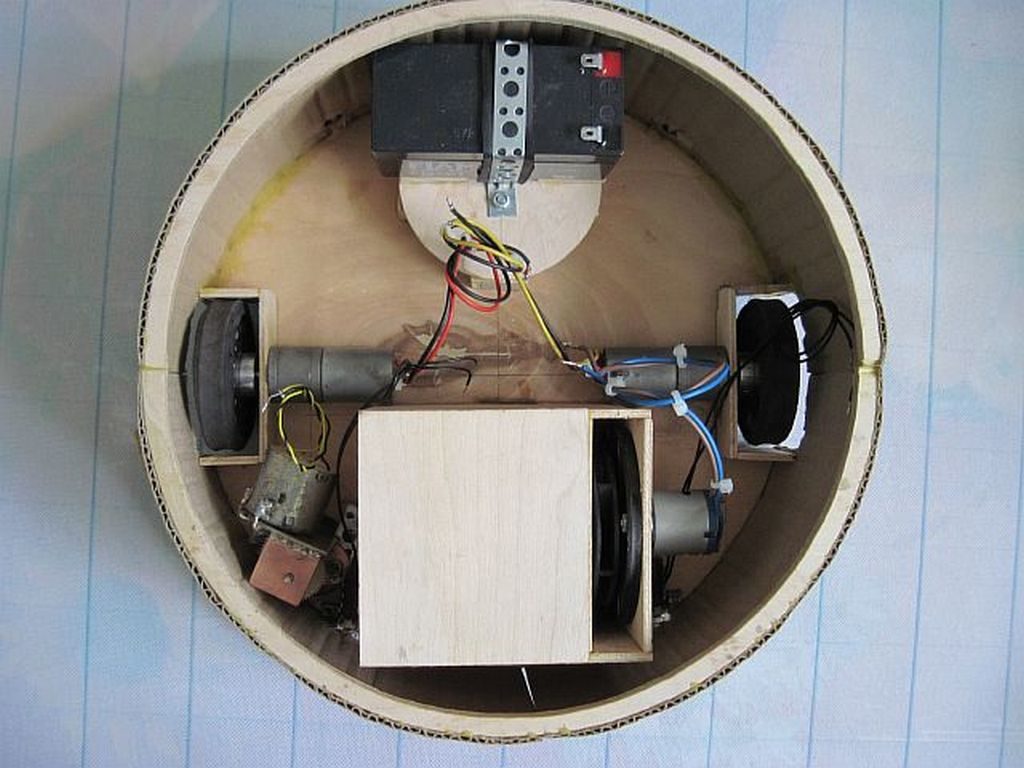
Всі проблеми були вирішені шляхом складання нової платформи з картону. Для цього потрібно вирізати 2 кола діаметром 30 см, а потім склеїти їх поперек волокон. У підсумку виходить досить міцна конструкція на вигин. Що стосується моторчиков і редукторів, то вони були взяті з попередньої саморобки.
Крок другий. створюємо сенсори
Спочатку робот орієнтувався за рахунок далекомірів, але автору їхня робота не сподобалася і в підсумку було вирішено від їх позбутися. На їх зміну прийшли контактні бампера, при цьому робот став вести себе адекватніше, та й вкладень при цьому потрібно менше.

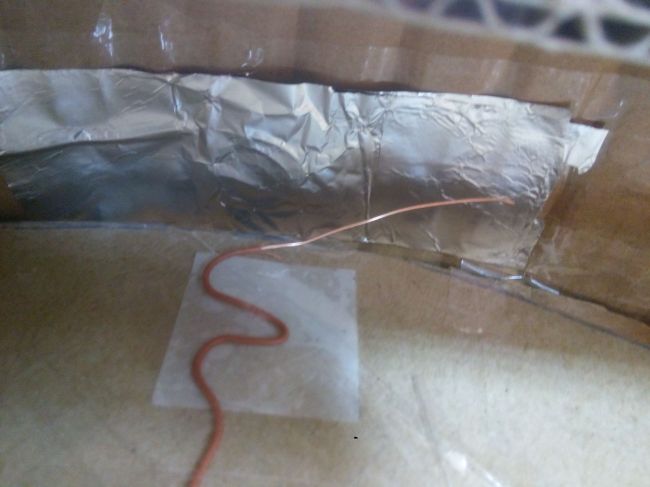

Контактні бампера виготовляються дуже просто. Потрібно взяти картон і на одну його сторону приклеїти фольгу, це буде першим контактом. До цієї фользі потрібно подати напругу +5 В. Навпаки платформи потрібно встановити вигнутий проводок від кручений пари, він підключається через резистор, завдяки цьому помилкових спрацьовувань буде менше. Коли робот буде в щось врізатися, то будуть замикатися контакти, і потім електроніка буде розгортати робота в іншому випадковому напрямку.
Крок третій. Робимо пилосос і мішок
Завдяки таким матеріалам як картон і скотч можна швидко зібрати практично будь-який макет. Для роботи турбіни використовується джерело живлення в 18 Вольт, безпосередньо від батареї. При такому навантаженні кулери гріються, але працюють.


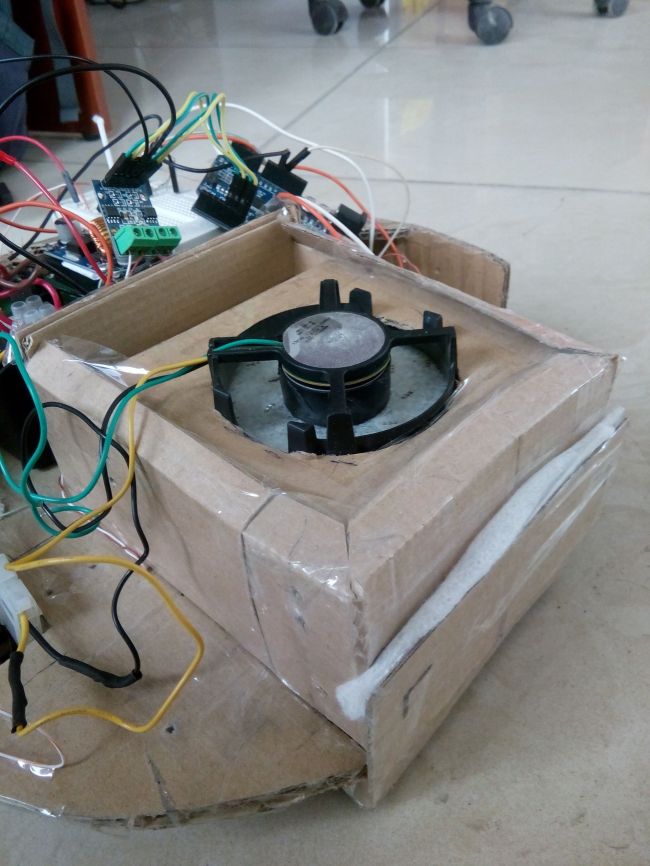



Для виготовлення турбіни береться кулер від комп'ютера і потім від нього відламуються все лопаті. Далі на кулер кріпиться турбіна від пилососа, її потрібно приклеїти суперклеєм. Найголовніше тут - приклеїти точно, не повинно бути дисбалансу. Без навантаження і харчуванні 18 Вольт кулер видає близько 2600 RPM, що створює відмінну тягу. У висновку вся конструкція збирається так, як можна побачити на фото і після цього робота можна відчувати.
Що стосується алгоритму роботи, то він дуже простий. Якщо робот в щось врізається, він потім розгортається на випадковий кут.
У майбутньому автор планує зробити платформу з фанери, щоб вона була міцнішою. Ще в планах установка двох щіток спереду для більш ефективної збірки сміття. Видувається повітря можна направити під платформу, щоб пил збиралася ефективніше.
Зараз популярність роботизованих домашніх прибиральників все зростає з кожним днем. Це обумовлено тим, що дані пристрої здатні підтримувати покриття вашого статі в чистоті і при цьому не забирати у вас часу.
Їх головною відмінністю від керованих людиною побратимів є те, що очищення поверхні, переміщення і орієнтування в просторі здійснюються пристроєм самостійно. Цього вдалося досягти завдяки наявності спеціальних датчиків, які контролюють зміну режиму роботи, переміщення і підзарядку пилососа.
Основна проблема полягає в тому, що придбати робот-пилосос на ринку зараз досить проблематично. Далеко не скрізь вдається підібрати підходящу модель, та й цінова політика деяких реалізаторів влаштовує далеко не всіх. Однак не варто впадати у відчай. У вас завжди є можливість створити саморобний робот-пилосос. Само собою, зробити такий пристрій своїми руками і в домашніх умовах - це дуже тривалий процес, який потребує терпіння, визначеного набору матеріалів та інструментів, а також навичок роботи з подібного роду технікою. Схема створення робота-пилососа в домашніх умовах цілком збагненна навіть для любителя. Однак в процес створення подібного роду механізмів необхідно вникнути і з'ясувати всі нюанси майбутньої операції. В іншому випадку ви лише даремно витратите час і кошти.
 Робот-пилосос своїми руками
Робот-пилосос своїми руками Опис саморобного робота пилососа
Якщо ви хочете створити механізм, який буде ідеально підходити для очищення поверхонь підлоги у вашому будинку, вам слід уважно дотримуватися всіх правил, які наказує схема зборки, представлена в наступному пункті.
Якщо ви все зробите правильно, у вас вийде модель, що відповідає цьому опису:
- діаметр пристрою становить 30 сантиметрів, висота - 9 сантиметрів. Корпус зроблений зі спіненого полівінілхлориду. При цьому товщина самого корпусу досягає 6 міліметрів;
- в бампері встановлені 4 датчика, за допомогою яких буде фіксуватися положення робота-пилососа в просторі. При цьому мається пара перемикачів, приєднаних на випадок непередбачених зіткнень. Краї оббиті гумовою прокладкою, щоб при випадковому зіткненні з меблями не пошкодити її;
- ємність для пилу і сміття виготовлена з полівінілхлориду товщиною в 4 міліметри. Фільтр для пилу виготовлений з 2 звичайних тропічних серветок, які можна купити в якому завгодно побутовому магазині. Кришка, що захищає вміст сміттєвого контейнера, прикріплена до основи за допомогою магнітів;
- турбіна виготовлена з тонких пластикових листів, фрагментів комп'ютерних дисків і полівінілхлориду;
- верхня кришка пристрою тримається на суперклей;

- інфрачервоні датчики мають 4 виходи підключення до системи «Ардуіно». При цьому звичайний режим роботи має на увазі видачу логічної одиниці, а ситуація, в якій хоча б один з датчиків системи спрацьовує - логічний нуль;
- якщо ІК-датчик не спрацював, а пилосос проте наткнувся на яку-небудь перешкоду, його бампер натисне на перемикач, що спровокує відкат пристрою на кілька сантиметрів назад. Після цього буде проведений розворот, а робота продовжиться. Перемикачі при цьому потрібні досить потужні, щоб своєчасно встановлювати бампер в початкове положення;
- мотор, який відповідає за рух передньої щітки, підключається в Arduino через MOSFET. При цьому в тому випадку, коли робот-пилосос знаходиться в русі, щітка обертається досить повільно для того, щоб пил, бруд і сміття не розкидалися по кімнаті, а, навпаки, збиралися разом і втягувалися в жерло. А якщо робот знаходиться біля стіни або кута, щітка прискорює темп своєї роботи, так як більшість пилу і бруду якраз і накопичується уздовж плінтусів;
- живлення робота пилососа здійснюють 4 літійіонних акумулятора, а також понижуючий перетворювач змінного струму. Кожна пара вищезгаданих літійіонних акумуляторів підключена послідовно;
- спиратись на цоколь виготовлено з високоміцної фанери;
- пристрій розроблений таким чином має на увазі наявність 3 кулькових коліс;
- всі щітки робота-пилососа виготовлені з досить жорсткою волосіні.
Схема збірки робота-пилососа в домашніх умовах
Щоб правильно зробити робот-пилосос своїми руками, необхідно дотримуватися наступного алгоритму (схема повинна виконуватися в чітко зазначеній послідовності):
- Завантажити необхідне програмне забезпечення. Якщо ви хочете зробити свій робот-пилосос максимально схожим на заводські аналоги (виходячи з виконуваних функцій), вам потрібно буде завантажити на мікроконтролер «Ардуіно» необхідне програмне забезпечення. Це можна зробити за допомогою звичайного персонального комп'ютера - досить лише завантажити код на плату «Ардуіно».
- Закріпити основні компоненти. Щоб засобу пересування робота-пилососа, кулер, мікросхеми, акумулятори та вся інша начинка пристрою були надійно закріплені, вам буде потрібно фанерна основа. Вона ж за сумісництвом буде днищем вашого пилососа. Туди ж кріпляться попередньо склеєні між собою за допомогою суперклею турбіна і ємність для збору відходів. Також контейнер повинен бути обладнаний спеціальною трубкою, через яку буде виводитися видувається повітря. Вона повинна бути захищена щільною тканиною, яка послужить засобом фільтрації. Кулер повинен бути послідовно склеєний з усіма сервоприводами, після чого посаджений на все ту ж фанерну майданчик, на якій на той час вже повинні бути монтовані мікросхеми та акумулятори для підживлення пристрою. Колеса для робота пилососа можуть бути куплені на ринку (проте ви можете спробувати зробити їх своїми руками з консервної банки).
 Механічна частина робота-пилососа
Механічна частина робота-пилососа - Встановити бампер. У цій моделі він виготовляється з полівінілхлориду. Однак можливі і металеві аналоги. У будь-якому випадку при зіткненні він повинен фізично впливати на перемикач, який змусить апарат рухатися в інший бік. Також варто відзначити, що після зіткнення бампер повинен повертатися на початкове місце.
- Встановити корпус. Щоб весь вміст конструкції було надійно захищене, найкраще використовувати корпус з полівінілхлориду. При цьому на ньому можна зробити надрізи, щоб він краще знімався. Кришка корпусу кріпиться за допомогою магнітів. В ідеалі їх повинно бути не менше 8 (вітаються варіації, в яких використано більше їх кількість).
необхідні матеріали
Щоб зробити робот-пилосос своїми руками, вам будуть потрібні наступні матеріали:
- «Ардуіно Про Міні» - головний мозок і інформаційний центр всієї конструкції.
- Драйвер моторів робота-пилососа серії Л298Н.
- Понижуючий перетворювач змінного струму.
- Модуль з мосфети, за допомогою якого буде здійснюватися контроль над темпом роботи передній щітки пристрою.
- 4 інфрачервоних датчика, які будуть фіксувати наявність перешкод на шляху робота пилососа.
- Пара перемикачів, які будуть змінювати напрямок руху пристрою при зіткненні.
- 3 кулястих колеса.
 Колеса для саморобного робота-пилососа
Колеса для саморобного робота-пилососа - Мотор, що забезпечує обертання щітки в різних режимах.
- Мотор високої потужності, що забезпечує нормальне функціонування турбіни.
- 4 літійіонних акумулятора, а також засіб контролю над ними.
- Фанерне підставу потрібного розміру.
- Корпус з полівінілхлориду потрібного розміру.
- 8 пар магнітів для кріплення.
- Проводи, кабелі, перемикачі та інші елементи електричної мережі.
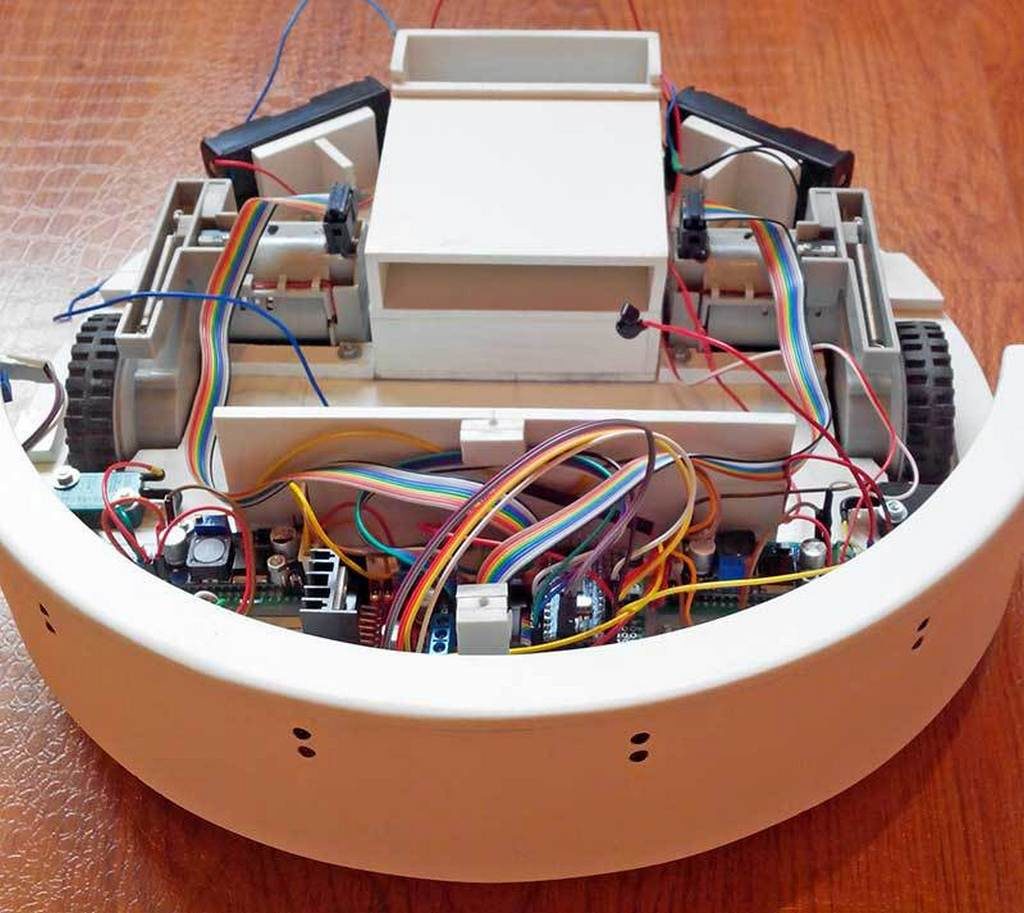
За минулий час робот серйозно змінився. Як і обіцяв, хочу поділитися доработакмі.
Отже, що було зроблено:
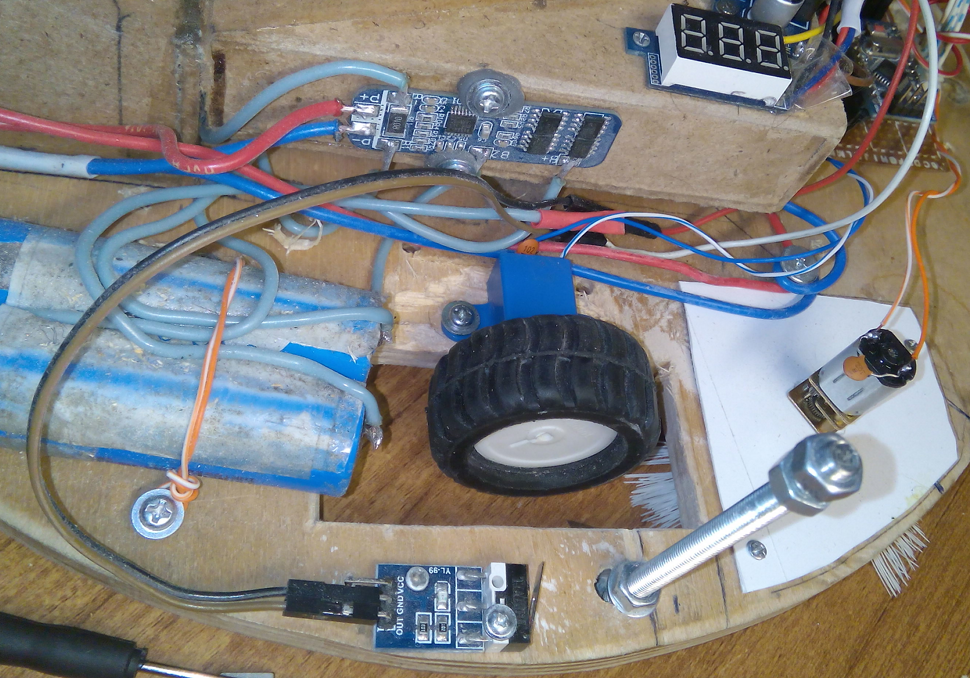
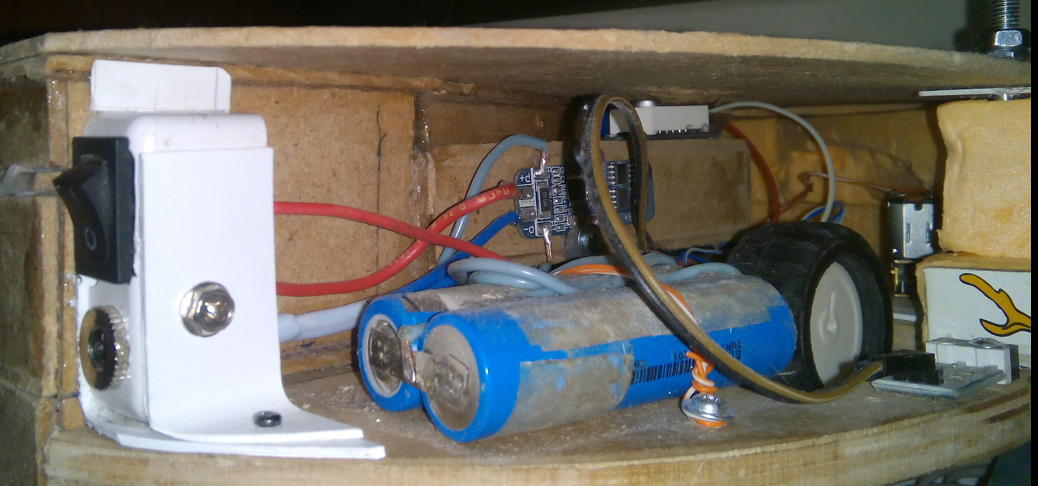
1. Замість картонного підстави тепер коло з фанери 9мм - це дозволило добре закріплювати всі деталі робота, використовуючи нормальні шурупи, а не стяжки.
2. Наступним потрапив під переробку блок пилососа. Мотор і турбіну залишив ту ж, але розмістив їх не «млинцем», а виніс турбіну в передню частину корпусу. Такого я у саморобок ще не зустрічав. Ця хитрість дозволила зменшити висоту пилососа до 8,5 см і він тепер пролазить навіть під деякі шафи. Сам же корпус пилососа зібраний заново з тонкого ДВП.
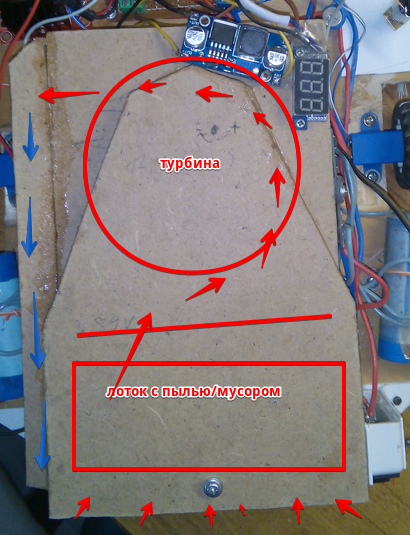
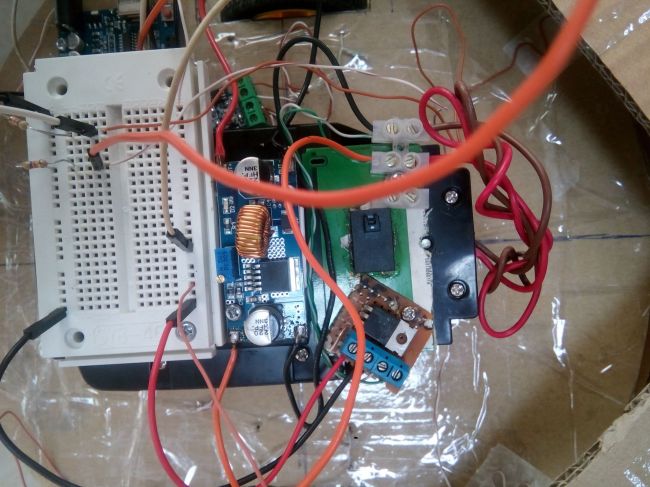
«Відпрацьований» повітря довелося виводити за межі корпусу через те, що він навіть після фільтра досить курний, і вся ця пил видувають прямісінько на лівий мотор. Також на корпус «тимчасово» повісив плату DC / DC step UP для підвищення напруги живлення турбіни. Вхідна напруга + 12V, але цього замало для впевненого всмоктування середньої / великої бруду. При напрузі близько + 16V тяга вже достатня. Можна підняти і вище, але тоді і збільшиться гучність. Також на корпус пилососа (знову ж «тимчасово») закріпив вольтметр, щоб приблизно визначити поточний заряд батарей.
3. Наступними під роздачу потрапили «жовті» мотор-редуктори. Чи не підходять вони через велику шумності. Та й зменшити швидкість ходу на цих моторах без втрати в моменті, що крутить у мене нормально не вийшло - робот носився по кімнаті, лякаючи кішку)
На просторах інтернету наткнувся на маленькі мотори N20, вирішив використовувати їх.
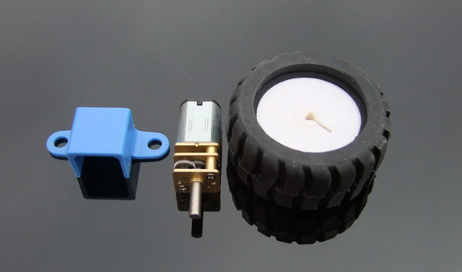
Але з ними трапилися 2 неприємності: продавець чомусь надіслав мені обидва мотори з різним передавальним числом, а при установці їх на платформу, вони виявилися дуже гучними, навіть гірше, ніж ті китайські жовті мотор-редуктори. Ймовірно шум можна зменшити, якщо зробити такий собі «демпфер» між мотором до корпусом, але я поки зупинився на пошуку інших моторів, хоч з цими робот і перестав бігати по кімнатах як очманілий) Ну і поки проводив експерименти, спалив маленький контролер мотор-редукторів, в результаті поставив-таки L298N.


5. Передній бампер. З ним довелося повозитися, випробувавши багато різних варіантів. У підсумку зупинився на ПЄНОПЛЕКС

Також в якості датчиків стінки поставив найпростіші концевики. Ніяких додаткових пружинок не знадобилося - кнопочки досить пружні, щоб повертати бампер назад після зіткнення з перешкодою.
6. Встановлено BMS-контролер на 3 літієвих банки. Спочатку хотів поставити 4, але BMS на 4 банки прийшов бракованим, поки, знову ж таки «тимчасово», залишив так

В результаті вийшов непоганий бюджетний, простий, але дуже гучний робот-пилосос.
Якщо читачі підкажуть, які мотор / редуктори краще використовувати, буду вдячний. Потрібні негаласливим, з харчуванням 3-12v, приблизно 60 обертів вала в хвилину. Дякуємо.
Автоматизований пилосос з автономним джерелом живлення, звичайно ж, не розвиває таку, як ручний варіант. Практичні випробування показали велику ефективність використання маленької щітки спільно з всмоктуючої турбіною. для прибирання по кутах передня частина пилососа оснащується 2 щітками, які при роботі підгортають сміття до головної.
Харчування роботизованої системи можна здійснювати від кількох акумуляторів, напруга на клемах яких - 12 V (18 V), а його ємність дорівнює 7 А * год. Зарядка здійснюється при прямому контакті або бездротовим способом. Застосування останнього збільшує витрати на комплектуючі деталі.
Самостійний повернення робота до місця зарядки - складне завдання, яке можна вирішити установкою передавального маяка.
Будь-яка автоматизована модель збирається на базі контролера (Мозку системи). Тому слід вивчити мову його програмування для занесення алгоритму команд. Слід також враховувати інтуїтивну спрямованість командного інтерфейсу, що значно полегшує процес. Як мікроконтролер, так і використовувані датчики часто мають стандартизовані роз'єми для підключення згідно тому пайка потрібно рідко.

Підготовка до практичної реалізації проекту
Розглянемо застосування вищевикладених принципів на базі платформи Arduino Mega 2560. Процес створення складатиметься з кількох етапів:
- підготовка інструментів і матеріалів;
- виготовлення корпусу з колесами і відділом під сміття, пилозбірника і турбіни;
- монтаж датчиків і мікроконтролера, моторів з редукторами, акумулятора, щіток;
- виконання електричних підключень;
- введення програми в Arduino, визначення узгодженості датчиків;
- перевірка працездатності робота-пилососа і його здатності заряджатися самостійно.
Ідея реалізується за допомогою наступних матеріалів та інструментів:
- контролер Arduino - 1 шт, з драйверами;
- лист фанери (або щільний картон) - 1 м.кв;
- колеса - 3 шт;
- провід перерізом не більше 0,75 мм.кв (підійде кручена пара) - близько 2 м;
- блок живлення - 4 акумулятора по 18 V, індикатор заряду до них, зарядний пристрій;
- інфрачервоні датчики - 4 шт, контактні - 2 шт;
- електродвигуни: для турбіни - 1 шт, що обертає щітку - 1 шт, 2 мотора з редуктором забезпечують пересування;
- полівінілхлоридний корпус - 1 шт;
- клей - 1 упаковка, саморізи - 10 шт, скотч - 1 шт, набір магнітів;
- набір викруток та свердел, плоскогубці, ніж канцелярський, олівець, лінійка, шуруповерт, електролобзик.
Збірка робота-пилососа
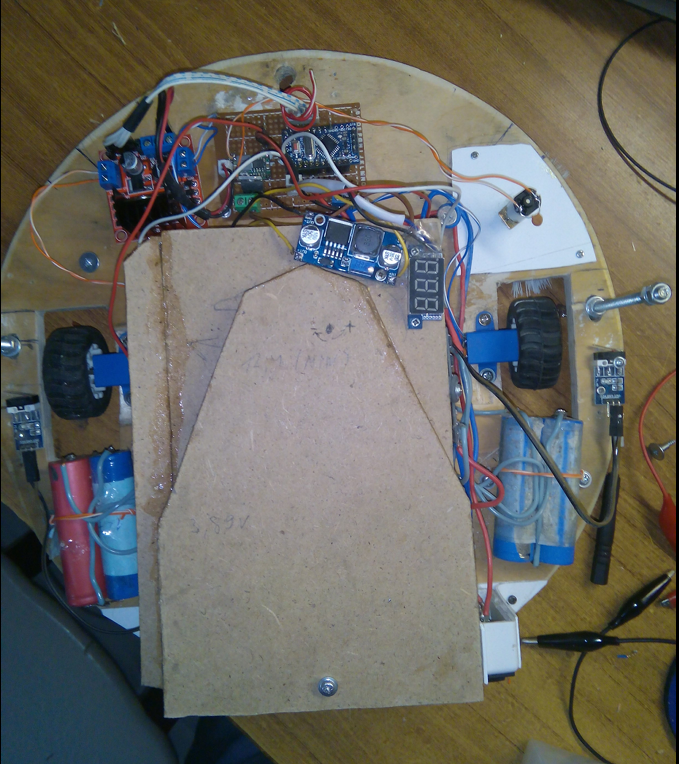
Підготувавши все необхідне можна приступати до складання. Вона полягає в проходженні вищеописаних етапів.
Важливим моментом роботи є повернення бампера в початкове положення після удару об перешкоду, тобто достатня його пружність.
Всі деталі закріплюються на наявні для цих цілей у них роз'єми саморізами або клеєм, скотчем. Отриманий результат представлений на фотографії:
Ця стаття про те, як я збираю свій робот-пилосос. Тут багато фото і відео для тих, хто теж горить такою ідеєю.
19 грудня 2014. Цікавитися роботами-пилососами я почав п'ять років тому в 2009 році, напевно після знайомства з Робофорумом. Всі ці роки були спроби щось почати, але так нічого і не було зроблено. Пару місяців назад я активно читав статті про робот-пилосос і вирішив остаточно що куплю Керхер RC 4.000. Минув час, дружина часто стала забиратися в кухні і в коридорі, мене це почало дратувати, думка про робота все міцнішала. Пару вечорів я знову провів в картинках і форумах про роботів-пилососах. Нарешті вирішив, що зроблю робота сам!
Мета створити робот-пилосос не гірше промислово-виготовленого і позбутися від шару пилу і дрібного сміття в будинку. У процесі вивчення пристрою роботів з'ясувалося, що вони дуже галасливі, близько 60 дБ, в той час як стаціонарний домашній миючий пилосос шумить близько 80 дБ. Мій саморобний робот повинен працювати максимально тихо, його габарити не повинні перевищувати габаритів заводських роботів і він повинен прибирати швидко і якісно.
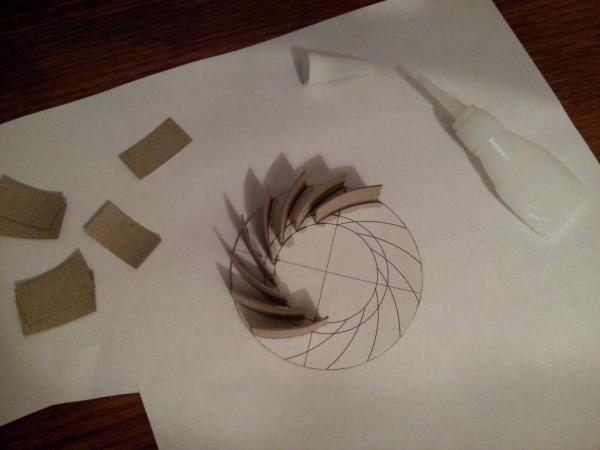
Перим справою треба було вирішити питання з всмоктуючої турбіною. У мене вже був досвід побудови турбін, але всі вони працювали погано. Для гаража я зробив саморобний пилосос з турбіни від старого пилососа "Ракета". Для робота потрібна маленька турбіна, тому я почав шукати спочатку. Зовсім випадково знайшов на Робофоруме повідомлення користувача Vovan, він поділився кресленням своєї турбіни . Не довго думаючи я перекреслити креслення і склеїв свою турбіну.
Турбіну я вирізав і склеїв з щільного картону за допомогою супер-клею за 20 хвилин. Перші випробування пройшли успішно!


20 грудня 2014. Купив сьогодні пілінг для тіла :) вобщем-то мені потрібна тільки прозора банку з кришкою, що закручується, вміст віддав дружині. Також купив щітку для одягу з жорстким ворсом, розібрав її, завтра зроблю з неї щітку для свого робота.

У Автокаде зробив начерки розташування елементів в корпусі. Зупинився на розмірах тазика діаметром 25 см і висотою близько 9 см. Поки не зрозуміло влізуть чи всі елементи, місця реально мало, але робити корпус більше не хочеться. Поставив сам для себе рамки :)
Вчора в Інтернеті виписав розміри заводських роботів-пилососів:
діаметр * висота (см)
36 * 9
32 * 8
32 * 10
30 * 5
22 * 8
Я задумав зробити свій пилосос з циклоном фільтром, тому висоту маленької не зробиш, її визначає банку для збору сміття, а ось в діаметрі можна виграти. За циклон звичайно спасибі Дайсон, давно переглядаю його винаходу і навіть гаражний пилосос зробив за принципом циклону. Мій фільтр буде простим, без всяких конусів і шаленою потужності всмоктування, для першого разу зійде.
21 грудня 2014. Від статевої щітки в гаражі відпиляв 15 см круглого держака і зробив з нього круглу щітку. Діаметр вийшов близько 70 мм. Розмір нереально великий і дуже жорстка щетина, не знаю як вона себе поведе, але напевно доведеться або переробляти або обтяжувати пилосос, бо щетина буде його підкидати. Щетину просто вставляв в отвори без клею, вийшло надійно. Всю конструкцію закріпив на шпильці діаметром 6 мм і по краях два підшипника.
Знайшов в гаражі два колеса, не повірите, від пилососа! Той самий ручний пилосос в якому не було нічого електричного, тільки 4 колеса і дві щітки приводяться в ресувні цими колесами. Колеса чекали свого часу близько 15 років :)

Зараз в Автокаде зроблю черговий креслення для кількох деталей, завтра все виріжу з фанери і спробую що-небудь зібрати вже на основі.
22 грудня 2014. Дуже хочеться зробити робот-пилосос своїми руками і закінчити його до нового року 2015. Вчора вночі на Ютубі подивився знову кілька роликів про роботів-пилососів і зокрема два ролика про Дайсон 360 Eye і Fluffy:
Після першого відео з роботом Дайсона я зрозумів, що роблячи свого робота діаметром 25 см і щітку довжиною 15 см я буду залишати брудні місця уздовж плінтуса на ширину 5 см. Після другого відео мозок взагалі перезавантажився і подумав чи не зробити счётку попереду робота ?! Що буду робити далі поки не знаю, тести покажуть.
Отже, сьогодні купив новий совок і дві щітки з більш м'якою щетиною. Совок купив через гумки, яка приклеєна по краю, вона прекрасно підійде для моєї конструкції.

Геометрію корпусу трохи змінив виходячи з нових думок і нової щітки. Розмір робота по колишньому 25 см, але тепер це половина кола і половина квадрата. Ширина щітки 21 см, діаметр близько 6 см. Випив основу з фанери 8 мм, прикріпив колеса і щітку, завтра зроблю редуктор і спробую що-небудь підмести :)

23 грудня 2014. Прикрутив до щітці шестерню і поруч прикріпив редуктор, як пассіка використовував гумку для грошей, для тесту прикрутив шурупом мотор. Нижче на відео тест на 6-ти і 9-ти вольтах.
Швидше за все щітку знову перероблю, занадто короткий ворс і занадто жорстко. Ворс повинен бути без пропусків, тому що залишаються смуги бруду. В цілому видовищно вийшло :)
Прикинув чи вистачить мені місця на три мотора в корпусі. Два мотора будуть крутити два колеса і один щітку. Плюс до всього багато місця займуть редуктори. Прийшла ідея замінити шестерёночние редуктори на черв'ячний, може бути зроблю пару тестів.
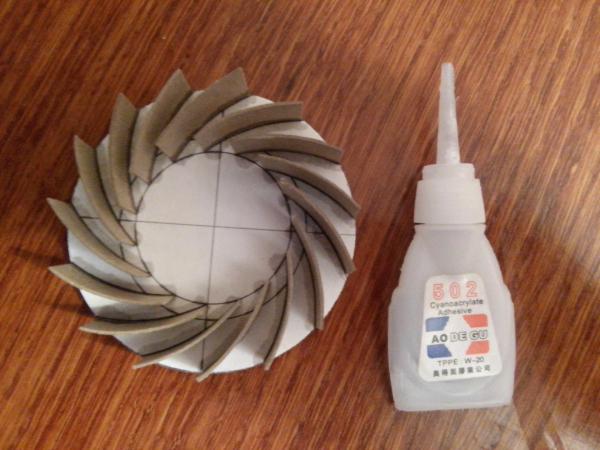
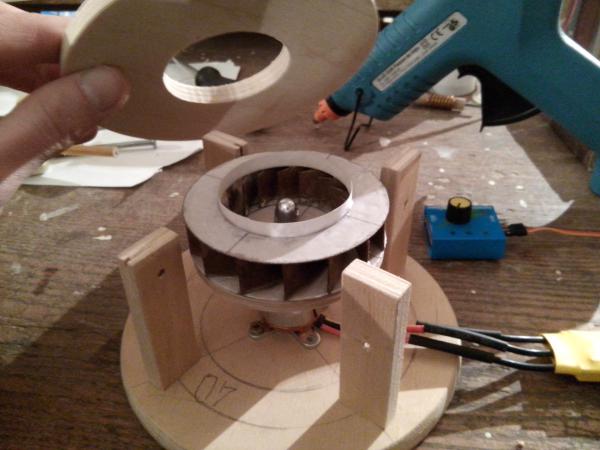
Усмоктувальну турбіну покрив два рази шаром епоксидної смоли, стала як пластикова. Картон більше не гнеться і якщо потрапить вода все буде добре. Центрировать не довелося, крутиться ідеально. Тим часом готую основу для сміттєзбірної банки. Зробив фільтр тонкого очищення з горлечка і кришки від пляшки з під кефіру. В якості фільтруючого тканини взяв одноразовий мішок від пилососа. Поки все клеїться, через пару днів прикручу на основу і знову все протестує.

Протягом роботи над роботом постійно приходить в голову думка обзавестися 3D-принтером. З тривимірним принтером було б куди простіше створювати такі деталі як мені потрібно і з високою точністю. Коли дрилем свердлиш фанеру свердло може відвести або нахил неточно 90 градусів, тут про високу точність можна тільки мріяти. До того ж деталі з фанери дуже громіздкі, на 3D-принтері все було б акуратно.
24 грудня 2014. З ранку протестував турбіну і банку для збору сміття, днем повторив експеримент з більш високим напругою. Результати не вражають. Фільтр тонкого очищення довелося поки відкрутити, тому як через нього потужність сильно падає. У банку сміття крутиться дуже ефектно, але реально потужності всмоктування не вистачає.
Тест турбіни з високою напругою.
У ці моменти з'явилося бажання на все забити, навіщо я взагалі за це взявся. Зараз дуже легко все кинути і забути - так найпростіше.
Увечері взяв безколекторний мотор і почав клеїти для нього нову турбіну по тим же кресленнями.
25 грудня 2014. доклеїла другу турбіну для бесколлекторного мотора, хотів протестувати, виявилося мотор обертається не в ту сторону. Завтра піду в гараж перепоювати дроти, а поки все відклав убік.
26 грудня 2014. перепаять дроти між контролером і двигуном, отримав обертання в потрібному напрямку. Турбіна почала працювати, але пару тестів на коліні вийшли знову сумними. Може бути навіть перероблю конструкцію турбіни, додавши трохи конусности, але про це пізніше.
Останні два дні дуже мало приділив часу розробкам, постараюся завтра виділити 4-5 годин.
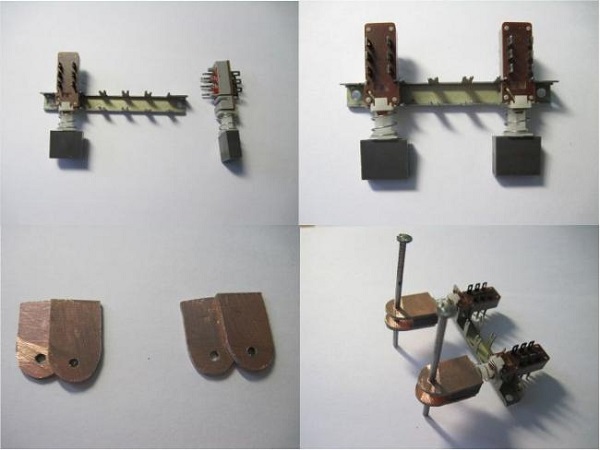
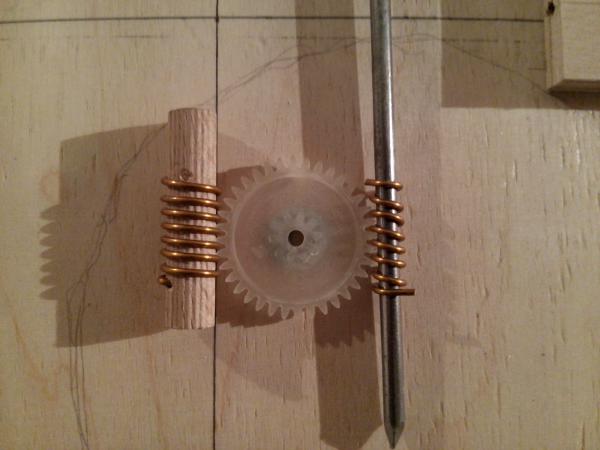
27 грудня 2014. Вирішив спробувати зібрати червячную передачу для ходової частини робота-пилососа. На фотках раніше я показував, що зробити черв'яка можна з цвяха і відрізка мідного дроту. Проблема виявилася в процесі припаювання дроту до цвяха. Паяльник у мене не дуже потужний, тому додатково цвях прогрівав на газовому пальнику. Однак якісно припаяти дріт так і не вийшло, тому взяв круглий шматок деревинки і намотав на нього дріт, витки пролив супер-клеєм. Черв'як вийшов цілком стерпний. Не звертаючи уваги на овальність дерев'яної основи і взагалі всього блоку з фанери механізм працював нормально, але млинець дуже повільно.
Було б непогано роздобути готові пластикові черв'ячні передачі, а поки відкладемо це всторонку.
Що стосується майбутнього споживання енергії моїм роботом. Зараз заковика з турбіною, що не хоче вона смоктати як годиться навіть при знятому фільтрі тонкого очищення. Якщо для турбіни використовувати звичайний колекторний мотор і живити його напругою в 12 вольт, то споживати він буде близько 0.6 ампера. Якщо використовувати бесколекторний мотор, то він буде споживати близько одного ампера. Плюс для руху робота буде використано два колектори мотора і для щітки ще один, кожен буде споживати близько 0.3 ампера. Електроніка буде теж щось споживати. Разом робот буде "їсти" приблизно від 1.6 до 2 ампер, в піках напевно до 2.5 ампер. Не знаю багато це чи ні, ніби як промислові роботи споживають три і більше ампер.
Знову переглянув купу відео і фото по запросу "принцип роботи робота-пилососа". Знайшов класну фотку турбіни від звичайного побутового пилососа. Прочитав на якомусь форумі, що чим довше лопаті турбіни, тим більший вакуум вона може створити за рахунок відцентрової сили.

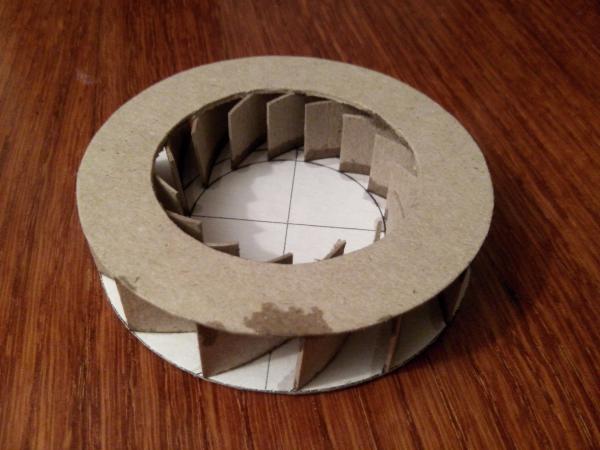
28 грудня 2014. склеїти сьогодні ще дві турбіни, відрізняються тільки товщиною. Лопаті зробив якомога довше. На фото нижче перша тонка (5мм висота лопаті) турбіна, в роботі вона дуже тиха, але ніфіга не смокче :)
Друга турбіна товщі (15мм висота лопаті).
Ще раз в гаражі спробував потягати щітку по підлозі, мотор часто затикається від навантаження, щетина все одно вийшла дуже жорсткою, та й діаметр щітки не завадило б зменшити. Завтра за любої погоди йду купувати щітку з самої м'якою щетиною, також зайду в магазин з іграшками пошукаю машинки з черв'ячним редуктором для ходової частини робота.
У гаражі протестував нову турбіну з напругою 12 вольт, подумав що 9 лопатей можливо мало. Будинки склеїв третю за день турбіну з довгими лопатями і кількістю 15 штук, фото додаю:

Закінчився ще один день. До нового року зробити пилосос вже не встигну як планував, проте хочеться вірити що все буде добре :)
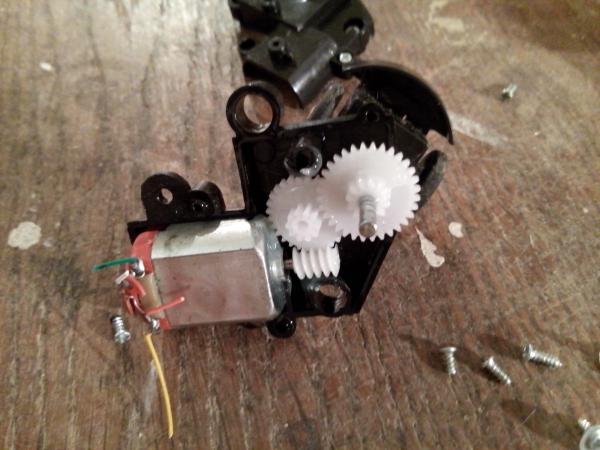
29 грудня 2014. Пішов сьогодні в магазин з іграшками в пошуках черв'ячної передачі. По дорозі згадав про іграшку дочки - кінь. Цей кінь дочці не дуже подобався та й вобщем-то і мені він не дуже :) Але зате у нього всередині цілих два черв'яка і 4 + 4 шестерні.


У магазин іграшок я все таки заглянув, потім в другій і купив там машинку-перевертень. Машинку купив не стільки за механізм, скільки за її колеса, вони підіймаються на будь-які поверхні. Всередині у машинки черв'ячної передачі не виявилося. Колеса цілком можливо я використовую для саморобного робота, а поки машинку віддав дочки - вона в захваті :)

Вдень прийшла в голову думка зробити робот-електровіник, тобто конструкція таже що і зараз, тільки відсутній турбіна, сміття просто збирається в відсік. Коли в магазині шукав нову щітку з більш м'яким ворсом (її так і не купив) випадково побачив це:

Цю кришку я зрозуміло відразу купив. Це вже готовий корпус робота, по сучасному прозорий і навіть немає зайвих елементів. А насправді це "Кришка для мікрохвильової печі" (діаметр 24.5 см), що їй накривати і навіщо не знаю, але робот повинен вийти гарний :) Але про це вже в іншій статті.
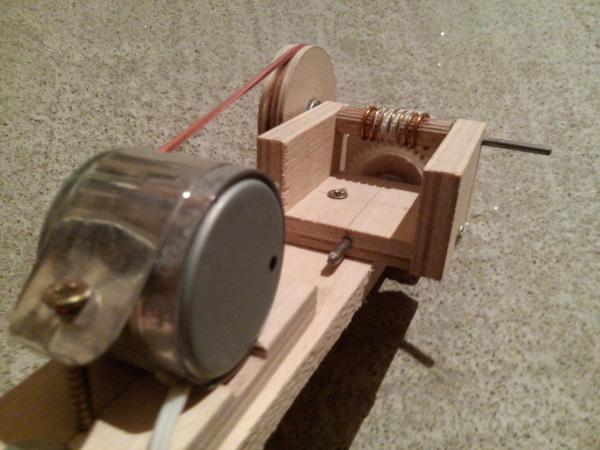
Увечері розламав коника, вийняв шестерні і прикрутив до свого роботу, вийшло класно! Механізм займає мінімум простору і досить сильний для пересування платфоми. Поки зібрав не все, тому фотки будуть пізніше. А поки виношую ідею як зробити нову щітку, зменшити її діаметр до 3-4 см і замінити редуктор з шестернями на черв'ячний.
До речі на замітку, черв'яка можна вийняти і з інших іграшок. Так у нас валявся поламаний слон, але в принципі це не важливо, головне це механізм, який у багатьох іграшках (машинках, танках та інших) такий же, дивіться фотки:


Ах так, забув написати про нову турбіну, вона виявилася помітно продуктивніше всіх інших. Для кращого проходження повітря я ще додав конус в середину турбіни.
05 січня 2015 року Незважаючи на новорічні свята всі попередні дні я намагався якось просунутися в роботі. Дуже багато інформації перечитав про 3D-принтери, якби був такий принтер в моєму арсеналі, то давно вже надрукував велику частину деталей. Поки в голові будую плани на майбутнє як зібрати 3D-принтер своїми руками.
На сьогоднішній день я зробив нову щітку. Взяв дерев'яну паличку діаметром 10 мм і насверліл по спіралі отворів. В отвори вставляв щетинки і запаюють їх зі зворотного боку вижігателем по дереву.

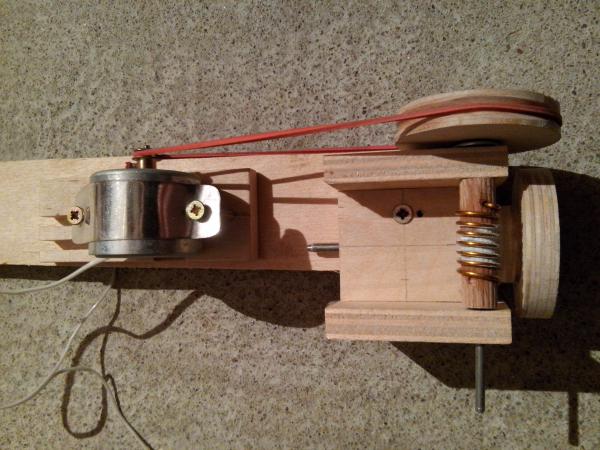
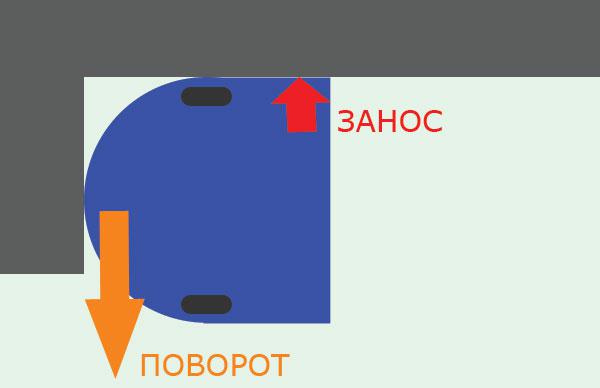
Зібрав ходову частину, поки не тестував, сохне клей. Нову щітку теж поставив на місце, вийшло багато косяків, без них ніяк, всетаки це мій перший робот. До речі, я відмовився від прямокутної задньої частини і зробив основу під круглий корпус. Пов'язано моє рішення з переосмисленням руху робота, якщо уявити що робот рухається уздовж стіни і в щось впирається, то щоб повернути йому доведеться зробити маневр з рухом назад, тому що квадратний зад буде заносити на стіну.
Багато часу я витратив на пошук рішення для "зору" робота. Механічний бампер мене не дуже влаштовує, він псує зовнішній хоч і є найпростішою схемою визначення перешкод. Я зупинився на інфрачервоному датчику. Поки немає можливості зібрати датчик через відсутність інфрачервоних фототранзисторів.
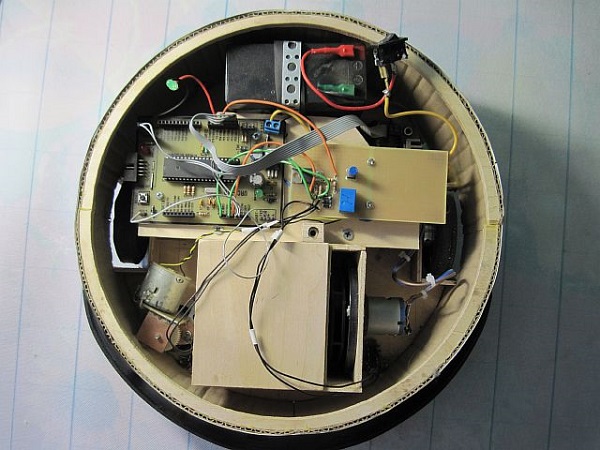
07 січня 2015 року Вчора до першої години ночі збирав робота щоб хоч якось його протестувати, погратися :) Як "мозку" використовується плата Arduino Pro Mini + моторшілд на мікросхемах L293E з обв'язкою (цю плату я використовував в своєму першому проекті з управління моторами онлайн через Інтернет). Управління здійснюється з пульта від телевізора. Коротке відео:
Конструкція виглядає рідко, насправді так і є, майже всі механізми ледве дихають. Сьогодні я зрозумів на скільки здавалося б простий робот так складно зробити. На поточний момент майже у всіх вузлах у мене проблеми, потрібно глобальна переробка майже всього.
Привід коліс на черв'ячної передачі по швидкості вийшов що треба, але його виконання залишає бажати кращого. Частина приводу розміщується у відсіку, де буде рух повітря зі сміттям, це довго працювати не буде. На колесах я хотів просвердлити отвори, які служили б додатковим датчиком руху. З одного боку колеса буде розташовуватися інфрачервоний світлодіод, з іншого ІК-фототранзистор. Ця схема при русі робота буде пульсувати, якщо імпульсів немає, значить робот уперся в щось і не рухається.
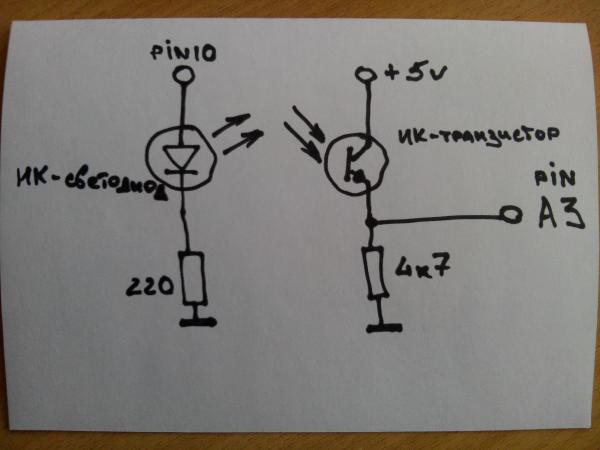
Для датчиків наближення я купив ІК-світлодіоди і ІК-фототранзистори, але після тестування такого ІК-бампера стало ясно, що ідея погана. Датчик реагує на сонячне світло, а чорні предмети зовсім не бачить. Конструкіція має право на життя, але в більш простих саморобки. Кому цікава схема ділюся:
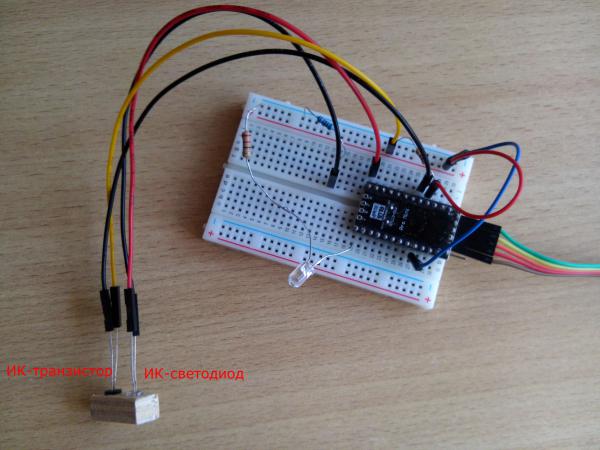
Якщо до датчика близько піднести руку, то на макетної платі загоряється світлодіод.
Також я спробував ультразвуковий датчик. Він прекрасно вимірює відстань, але тільки методом "в лоб", якщо площину об'єкта знаходиться під кутом, то показання спотворюються. Вобщем навіть з таким датчиком бампер у робота нормально працювати не буде.
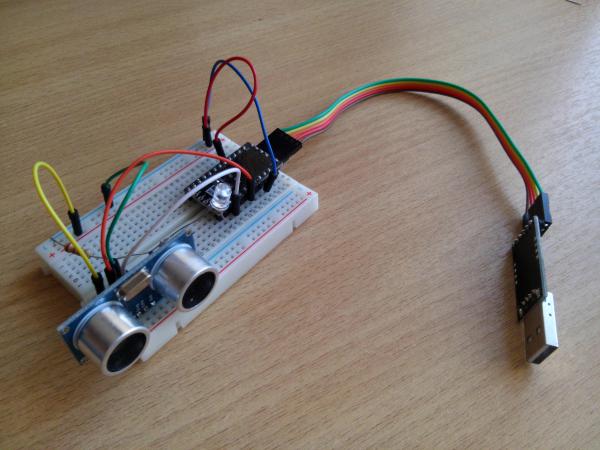
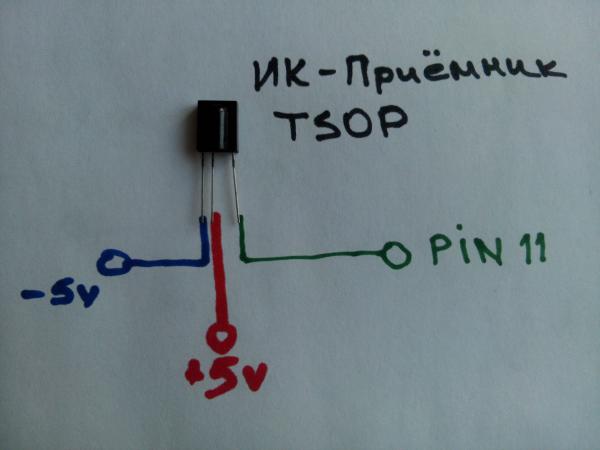
Для управління з пульта використаний ІК-приймач TSOP, який маркування не знаю, в принципі можна використовувати будь-який ліпший. Управляти можна з будь-якого пульта, навіть з мобільного телефону, але перед цим необхідно дізнатися коди клавіш кнопок на пульті. У скетчі проста схема, яка відправляє код кнопки в монітор порту при натисканні на пульті. Приклад підключення і скетч нижче:
Що стосується щітки для підмітання, вийшла вона відмінно, ширина майже 21 см, при корпусі 25 см. Є нюанси: ворсинки не відновлюються, якщо їх прим'яти. Приводний механізм ніщо не блокує, намотає волосся за 3 хвилини роботи і заступоріт. Щітка незнімна. Мотор дуже слабкий, але кількість обертів дуже навіть підходяще, на столі мете дуже ефектно.



Зараз цей робот-пилосос буде розібраний і переосмислений. Швидше за все діаметр корпусу збільшиться на 3 см. Спочатку колеса я думав зробити на незалежній підвісці, щоб ховалися якщо раптом хтось наступить на робота. Привід коліс всетаки зроблю на шестернях, замість черв'яка. Ворс для щітки потрібно пошукати інший, більш еластичний і щоб тримав свою форму. Бампер мабуть доведеться робити механічний. Багато питань по всмоктуючої турбіни.
Незважаючи на всі недоробки робот сподобався дружині, а дочка взагалі в захваті :)
Далі буде. Так часто писати про робота більше не буду, але фото і відео звіти хоча б раз на місяць постараюся публікувати.
Березня 2015. Купив електровіник.
Робот пилосос ще в проекті!




