Servomoteur – qu'est-ce que c'est ? Comment fabriquer et connecter un servomoteur de vos propres mains ? À quoi sert un servomoteur et comment ça marche ? Les servomoteurs électriques.
La liaison du portail est entraînée par un servomoteur ou « martelée dans les boulons »
- Blog de l'entreprise Amperka
Bonjour à tous les habraconstructeurs !
Une pensée irréfléchie m'est venue à l'esprit : me procurer un appareil qui puisse être utilisé pour enfoncer un boulon. Juste pour démontrer le servomoteur du robot. L'algorithme est simple : on donne l'ordre de lever le marteau, on vérifie jusqu'à ce qu'il monte et on relâche le marteau ; Et ainsi jusqu'à ce que les fleurs soient abattues. Comment savoir si le marteau bouge ou s’il est obstrué sans endommager les capteurs supplémentaires ? Mettez sous tension le « mauvais » servomoteur ! Comment gagner de l’argent vous-même est disponible dans les statistiques.
Qu'est-ce qu'un servomoteur ? Seul, vous savez tout, mais tous les problèmes : c'est la raison pour laquelle, lors du remplacement d'un moteur à l'arrêt, le flux ne tourne pas simplement pendant que la tension est fournie, mais tourne vers un point donné et s'installe dans cette position. Le circuit est installé derrière un signal PWM supplémentaire. Le servomoteur du camp en colère est également coupable de connaître sa puissance. Avant de commencer l’épi, j’ai commencé à croire qu’il serait plus simple et plus efficace de nourrir la culture actuelle directement. Ce n’est pas le cas. Parlons de tout dans l'ordre.
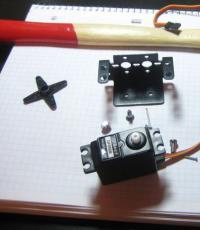
Eh bien, un accessoire de divination : un servomoteur auquel est fixé un marteau sur un petit socle pour l'alignement. Le servomoteur est connecté à Arduino via IO Shield et le microcontrôleur configure l'algorithme :
- Installer le servomoteur pour soulever le marteau
- N'agissez pas jusqu'à ce que le servomoteur vous dise ce qui a été réalisé
- Allumez le servomoteur et laissez tomber le marteau sur les bras
- Lisez le texte dans la bonne position, ce qui est tombé
- Si le fil n'a pas changé après plusieurs chutes, cela signifie qu'il a cessé de se boucher. Apparemment, le vin est bouché - on suppose que
- Une fois que tout a changé, on recommence

Sciage et roulage :

Commençons par écrire un firmware pour Arduino. Il devient clair qu'installer un kut chantant pour servir n'est pas un problème. Zocrema, qui vous permet de créer une bibliothèque Servo standard, qui forme un signal de sortie PWM à partir de la valeur spécifiée en degrés. Et le principal problème pour les lecteurs est le suivant : il n'y a pas de fonctions pour cela.
Shvidko, après avoir recherché le problème sur Google, a trouvé de nombreuses informations sur les forums, où ils ont confirmé avec autorité : c'est impossible ! Les servomoteurs sont des appareils en écriture seule. Cela ne me dérangeait pas, je sentais intuitivement qu’il était tout simplement possible d’obtenir ces données.
Matchasina
Après quelques blagues récentes, vous pouvez comprendre à quel point le serveur est aux commandes. Il s'agit du moteur principal à débit constant, qui est relié à la broche de sortie par l'intermédiaire d'une attelle d'engrenages qui forment l'engrenage inférieur. Ce même axe de l'intérieur est physiquement fixé au potentiomètre (résistance de réglage). Lorsque le moteur est allumé, la broche tourne, le curseur du potentiomètre tourne, la tension de sortie du potentiomètre change, la tension du potentiomètre est lue et la tension a atteint le niveau spécifié - la valeur est atteinte, le moteur est allumé. animéEnsuite, à l’aide d’un potentiomètre, vous pouvez déterminer le courant coupé derrière le signal. Il n'était plus possible d'allumer le servomoteur et de se connecter à l'emplacement souhaité. Regardons:

Je vous dis tout de suite que j'ai irrévocablement cassé le servomoteur de la photo lors du processus d'analyse. Il n'était pas nécessaire de retirer la carte avec l'électronique, il suffit de retirer le capot arrière, qui s'insère sur 4 vis. Ce n'était pas immédiatement évident, et pour déterminer où se trouvait le potentiomètre sur la carte soudée, nous avons dû sacrifier un lecteur.
Axe en potentiomètre soudé sur les servos dans DFRobot :

Nous avons besoin d'un signal du curseur qui change entre la tension minimale et maximale lors du virage. Nous prenons un multimètre, retournons la broche et voyons : quels circuits indiquent quel signal. Pour mon service, une tension de 0,43 correspond à un tour de 0°, et une tension de 2,56 V correspond à une rotation maximale de 180°.
Soudez soigneusement le nouveau fil de signal.

Nous le connectons à l'entrée analogique A5 de l'Arduino. Nous fermons le couvercle. Nous écrivons le programme :
#inclure
Allumez-le, essayez-le, essayez-le !
Avec quoi travailler, sans plus tarder, il existe de nombreuses options : vous pouvez créer un contrôleur basé sur ce qui est utilisé sur les navires pour régler la poussée (vers l'arrière/vers l'arrière) ; il est possible d'utiliser le servo avec la tringlerie du portail comme élément du contrôle autonome du kerma de n'importe quelle machine ; beaucoup de choses sont possibles. Que votre fantaisie nous accompagne !
Servomoteur(lat.servus - serviteur, assistant ; apporter, quoi coudre)- Conduire de Keruvan à travers rappel négatif , qui permet de définir précisément les paramètres du roc.
Le servomoteur est le plus souvent utilisé en robotique. Il est impossible de s'en passer, surtout lorsqu'il s'agit du haut niveau de précision du mouvement des objets et des objets. Ce problème se pose au fil du temps avec la destruction de tout type de travail mécanique (préparation, ébullition, broyage, déplacement de produits sur un convoyeur, etc.). De tels robots devraient avoir des manipulateurs qui ressemblent à des mains mécaniques. Vlasna, la célèbre robotique industrielle utilisée pour automatiser la production partout dans le monde, nous est présentée devant les manipulateurs. Et aucun de ces manipulateurs ne peut se passer de servomoteurs connectés les uns aux autres. Pourquoi?
Tout à droite est contrôlé par le servomoteur. Un servomoteur est un entraînement dans lequel une liaison de rétroaction négative est créée, qui permet un contrôle précis des paramètres de l'arbre d'entraînement (le plus souvent l'arbre de sortie). Pour créer une telle liaison retour, il faut utiliser le capteur de position de la lanterne de sortie du servo variateur, ou bien des capteurs de fluidité, des capteurs de bruit, etc. peuvent également être connectés. є accrocher ou tourner en position. Cette position est installée et « vérifiée » jusqu'à ce qu'une commande de changement de position soit trouvée. Par exemple, un signal est envoyé indiquant que l'arbre est installé dans la position d'angle de 90 degrés. L'arbre tourne dans sa position et s'ajuste jusqu'à ce qu'un signal arrive concernant une nouvelle position. De telles possibilités affectent sérieusement le servomoteur du motoréducteur primaire, qui ne peut pas tourner en continu tant qu'une tension lui est appliquée. En conséquence, si un robot est équipé de tels entraînements, il peut s'effondrer comme une main humaine et détruire le robot qui peut être détruit.
Il existe de nombreux types différents de servomoteurs dans l'industrie. Dans cet article, nous examinons les servomoteurs électriques dans l'industrie en général. Pour faire simple, ces servos ont un arbre qui les entoure. Pour plus de simplicité, nous examinerons le dispositif du servomoteur hobi SG-90 (Fig. 1), qui est activement utilisé pour la création de modèles initiaux de robots et d'autres mécanismes qui volent ou volent. Le servomoteur hobi, contrairement au servomoteur industriel, est plus petit, développe moins de force, est par ailleurs protégé et est en principe absolument identique à son homologue industriel.
Maliounok 1
Le dispositif pour le servomoteur hobi est représenté dans le petit 2. Cet entrepôt comprend un moteur électrique, une boîte de vitesses avec un jeu d'engrenages, un potentiomètre (qui modifie la fonction du capteur de position pour la tringlerie du plateau tournant), une commande électronique du moteur planche et un logement pouvant accueillir l'ensemble de l'ist. Sur quelles petites indications conduisez-vous, avec quel type de servomoteur devez-vous vivre et suivre ? Il se compose de 3 fils : le fil « plus », le fil « moins » et le fil qui envoie le signal qui le contrôle. Sur différents modèles de plaques-servos, les fléchettes peuvent avoir des couleurs différentes. Il est pratique de réaliser d'abord la vie « plus » des couleurs rouges, et de réaliser la vie « moins » pour les noires. Il n'existe pas de normes de couleur claires pour le signal (pour transmettre le signal de couleur). Pour certains servomoteurs, le fil de signal peut être blanc, orange ou marron.

Maliounok 2
Pour keruvannya, ces moteurs ont adopté la norme de signal keruyuchy. Il s'agit d'impulsions régulièrement répétées et, comme on dit, d'impulsions faibles (Fig. 3). La fréquence de ces impulsions devient progressivement constante et atteint 50 Hz. Sortez, quelle heure est-il ?impulsions (heure entre les fronts d'attaque des impulsions du vaisseau) réglées à 1 s/50 = 0,02 seconde, puis 20 millisecondes.

Maliounok 3
Ce qui est important, c’est que la position de l’arbre de sortie du servomoteur soit déterminée par la force de l’impulsion fournie. Pour plus de précision, le petit 4 montre la relation approximative entre la largeur de l'impulsion en coordonnées d'horloge et le sens de rotation de l'arbre d'asservissement. La commande de la rotation de l'arbre du servomoteur est soumise à des impulsions supplémentaires d'une fréquence de 1 à 2 ms (millisecondes).

Maliounok 4
Comme le montre le graphique, pour contrôler le servomoteur, rien de plus qu'un signal de modulation de largeur d'impulsion - PWM est utilisé. Vous pouvez découvrir ce qu'est ce PWM à partir des statistiques suivantes sur notre site Web.
Et comment la largeur de l’impulsion se transforme-t-elle en arbre de sortie ?
Comme attribué au bébé 2, le boîtier du servomoteur possède un autre module électronique de commande du moteur. Le signal envoyé au servo variateur est perdu sur la carte. Et l'axe généré par ce signal est également illustré dans le schéma fonctionnel du bébé 5, que nous analysons étape par étape. Le stade cutané est représenté par un rectum ou un cercle et numéroté. Au milieu de ces images cutanées directes se trouvent les appareils dans lesquels le signal est traité.

Maliounok 5
De plus, le signal de commande d'entrée SP avec modulation PWM arrive sur un microcircuit spécial avec des éléments logiques, qui est ensuite converti en tension Upr (étage n°1). Après ce signal Ucontrol (tension du noyau), l'élément d'égalisation de tension est trouvé. Cet élément est appelé sommateur, mais en fait, à partir du signal d'entrée Ucontrol, il produit une tension Urev (tension de retour), qui passe par la connexion retour de la résistance d'échange (étape n°2).
La tension Ucorr (tension corrigible) qui est sortie est forcée d'agir par le booster (étape n°3) et est fournie au moteur électrique. Le moteur tourne (étape n°4) et entraîne l'arbre de sortie vers le servo variateur, et en même temps le capteur de rotation sous forme de potentiomètre. Lorsque la poignée du potentiomètre est tournée, la tension change et sort, de sorte que la rotation de l'arbre passe à la tension Urev (étape n°5). Cette tension U sera égalisée (étape n°2) avec la tension Ucontrol, et la différence apparaîtra dès qu'on repassera au booster (étape n°3) et ainsi de suite. Le signal est de « marcher » avec la lancette depuis l'articulation du collier jusqu'à l'heure où la relation prend fin Ucontrol = Urev. L’accélération devient alors égale à 0 et le moteur commence à ralentir. Cela se produira si l'arbre du servo est dans une position qui correspond au signal d'entrée qui contrôle le Super.
Mettons tout cela en perspective. L'arbre du servomoteur est relié mécaniquement à la poignée du potentiomètre. Simultanément à la rotation du servomoteur, le potentiomètre tourne, ce qui entraîne un changement de roulement et de tension de sortie Urev. Apparemment, la tension de sortie du potentiomètre est directement située au point où tourne le servomoteur. Dans le même temps, le signal d'entrée du servomoteur Ucontrol avec une trivalité d'impulsions de 0,001 à 0,002 secondes définit le niveau de tension Ucontrol, qui indique de combien l'arbre du servomoteur doit tourner. Le bras du moteur électrique, au moment où l'arbre de servomoteur lui-même est dans la position requise, atteint le bras pour le signal Ucontrôler le signal du clignotant Uobraz. Et le booster de l'étage n°3 est nécessaire pour qu'une forte tension soit fournie au moteur électrique et que le moteur déplace l'arbre vers le servomoteur dans la position spécifiée le plus rapidement possible.
Appliquer le servomoteur
Comme mentionné ci-dessus, pour contrôler le servomoteur, vous devez utiliser les paramètres PWM. Un tel PWM peut être généré de différentes manières. Montrons-leur ce qu'ils font.
1. Contrôle du servomoteur à l'aide d'une minuterie 555 supplémentaire . La puce timer 555 peut fonctionner en mode générateur d'impulsions (pour un rapport sur cette puce, lisez l'article ci-joint). Il est alors possible de sélectionner de tels paramètres pour le fonctionnement de ces microcircuits afin que les impulsions dont nous avons besoin soient générées. En modifiant la vitesse de ces impulsions, c'est-à-dire en modifiant la vitesse des impulsions de 0,001 à 0,002 secondes, nous réglerons la vitesse de rotation de l'arbre de servomoteur.
Afin de mettre en œuvre un signal PWM, il est nécessaire de créer un circuit avec un espacement des impulsions régulé à une fréquence constante de 50 Hz. Les paramètres des composants du schéma (Fig. 6) sont sélectionnés de manière à garantir la sécurité. Si le signal du keruban doit satisfaire tous les esprits, il doit être inversé. Le transistor dans le circuit est absolument nécessaire. Pour déterminer la température dans les plages spécifiées, vous aurez besoin d'un potentiomètre avec une prise en charge maximale de 20 kOhm. Nous utiliserons deux potentiomètres de 10 kOhm (ces mêmes potentiomètres sont utilisés dans l'ensemble principal de l'Evolvecteur de 1er niveau, ce circuit est bien décrit. La course de fonctionnement du servomoteur est réglée à 180 degrés. C'est le cas lorsque la poignée est enroulée un servopotentiomètre tournera de degrés et pour un enroulement supplémentaire de l'autre - à 90 degrés supplémentaires.

Maliounok 6
Il est préférable de lire ce schéma, et vous pouvez le récupérer en achetant l'ensemble de base de l'Evolvector de 1er niveau.
2. Contrôler le servomoteur à l'aide d'un contrôleur. Z Il est également possible de générer le signal PWM requis à l'aide d'un contrôleur supplémentaire. Par exemple, vous pouvez programmer le contrôleur sur la plateforme Arduino. Pour simplifier au maximum la programmation de l'algorithme de contrôle du servomoteur (génération PWM), commencez à écrire des programmes appelés bibliothèques. Notre code de programme pliable, reçu du correspondant, est traduit en fonctions dont nous avons besoin à l'aide de commandes courtes lors de la connexion de la bibliothèque à notre programme principal. D'un point de vue algorithmique, le contrôle d'appareils tels que les servomoteurs est extrêmement simple et manuel.
Schéma de connexion, ainsi queUn croquis (programme) pour le contrôleur de servomoteur Arduino montre le petit 7.
Maliounok 7
ATTENTION : La connexion du servomoteur au plateau se fait au milieu, comme au niveau de la crosse (Figure 7), ce n'est pas nécessaire. Pour notre petit nombre de connexions, nous avons un servomoteur dans la catégorie « moins », qui gère même les petits flux sur lesquels nous travaillons régulièrement, en alimentant directement la carte. Un servomoteur de taille standard nécessite une force plus importante, ce qui peut provoquer une surchauffe et endommager le contrôleur. Les connexions à la durée de vie des moteurs ne doivent être établies que via une série de transmissions, en particulier lorsque la puissance est transférée simultanément aux servos.
#inclure<Servo.h>- Cette commande signifie connecter la bibliothèque pour le contrôle du servo variateur. Cette bibliothèque se trouve sur le disque Evolvector, qui est fourni avec nos ensembles d'autres niveaux. Vous pouvez également les trouver sur Internet et les placer dans le dossier « bibliothèques » de votre IDE Arduino.
La bibliothèque connectée contient un grand nombre de commandes, nous examinerons uniquement celles qui sont utilisées dans le programme.
Moteur de servo; - c'est un changement d'un type particulier. dvig- ceci est modifiable (le nom est suffisamment choisi). Servomoteur- ce type de changement (un type spécial précisé dans la bibliothèque acquise). Vous pouvez installer jusqu'à 12 types modifiables pour contrôler 12 servos. En d'autres termes, avec cette commande, nous avons informé le tableau que nous disposions d'un servomoteur, que nous avons appelé dvig.
dvig.attach(9);- Cette commande signifie que le servo variateur ( dvig) ajoutez jusqu'à 9 pinu (visnovku).
dvig.write (90); - cette commande change le servo variateur ( dvig) tournez-vous en position médiane (90 degrés).
dvig.write(0); - Fait pivoter le servomoteur à une position de 0 degré.
dvig.write (180); - Fait pivoter le servomoteur à une position de 180 degrés.
Vous pouvez découvrir ce que signifient les lignes du programme sur les pages de notre site Web ou vous renseigner auprès des principaux employés sur la manière d'entrer dans l'entrepôt.
Cet article couvre les servo variateurs : leurs dispositifs, fonctions, connexions des servo variateurs, connexions des servo variateurs, types de servo variateurs et leur alignement. Commençons et comprenons ce qu'est un servomoteur.
Comprendre le servo variateur
Un servomoteur est le plus souvent compris comme un mécanisme doté d'un moteur électrique, auquel on peut demander de tourner dans une certaine direction et de s'ajuster à cette position. Mais cela n’est pas complètement hors de propos.
Pour parler franchement, le servomoteur est entraîné via une tringlerie de commande négative, ce qui vous permet de contrôler avec précision les paramètres du volant. Un servo variateur est un type d'entraînement mécanique qui contient un capteur dans l'entrepôt (position, fluidité, force, etc.) et une unité de commande d'entraînement qui ajuste automatiquement les paramètres nécessaires sur le capteur et l'appareil en fonction du réglage externe.
Autrement dit:
Le servo variateur reçoit en entrée la valeur du paramètre qu'il contrôle. Par exemple, au coin de la rue
L'unité de chauffage est égale aux valeurs de sa sonde
En fonction du résultat du réglage, l'action est effectuée, par exemple : tourner, accélérer ou augmenter pour que la valeur du capteur interne se rapproche de la valeur du paramètre externe qui contrôle
Les servos sont extrêmement larges, ce qui réduit le nombre de tâches et de servos qui maintiennent la vitesse d'emballage spécifiée.
Un servomoteur hobi typique est illustré ci-dessous.
Comment sont contrôlés les servos ?
Fixation au servomoteur
Les servomoteurs transportent un tas de pièces de stockage.

Entraînement – moteur électrique avec boîte de vitesses. Pour convertir l'électricité en rotation mécanique, ce qui est nécessaire moteur électrique. Cependant, le plus souvent la fluidité du moteur est trop importante pour un moteur pratique. Pour réduire la liquidité, utilisez vikoryst boîte de vitesses: un mécanisme à engrenages qui transmet et transforme le couple.
En allumant le moteur électrique, vous pouvez envelopper l'arbre de sortie - le pignon d'extrémité du servomoteur, auquel vous pouvez attacher ce que vous voulez. Une protection pour que la position soit contrôlée par l'appareil est nécessaire capteur de clignotant - encodeur, qui fera demi-tour au signal électrique. A cet effet, un potentiomètre est souvent utilisé. En tournant le curseur du potentiomètre, le support change proportionnellement à la rotation. De cette manière, avec cette aide supplémentaire, vous pouvez installer une fraise à fileter pour le mécanisme.
Il y a un remplissage électronique entre le moteur électrique, le réducteur et le potentiomètre dans le servomoteur, qui indique la réception d'un nouveau paramètre, la valeur lue sur le potentiomètre, leur alignement et la mise en marche/arrêt du moteur. Vaughn est chargé de soutenir la conjoncture négative.
Il faut trois fléchettes pour atteindre le servo. Deux d'entre eux indiquent la durée de vie du moteur, le troisième délivre un signal de contrôle qui sert à régler la position de l'appareil.
Voyons maintenant comment contrôler le servomoteur.
Commande de servomoteur. Interface de signaux céramiques
Pour indiquer au servo variateur sa position, vous devez envoyer un signal dans quel but. Signal de durcissement - impulsions de fréquence constante et de largeur variable.

Ceux qui occupent la position qui peut occuper le servomoteur doivent rester en présence d'un maximum de deux impulsions. Lorsqu'un signal atteint le circuit qui le contrôle, le générateur d'impulsions qui s'y trouve fait vibrer son impulsion dont l'intensité est indiquée par un potentiomètre. L'autre partie du circuit est égale à l'intensité des deux impulsions. Dès que le dommage survient, le moteur électrique se met à fonctionner. Directement, l'enveloppe est indiquée par laquelle des impulsions est courte. Dès que les impulsions deviennent plus fortes, le moteur électrique commence à ralentir.
Le plus souvent, sur les serveurs de loisirs, les impulsions vibrent à une fréquence de 50 Hz. Cela signifie que l'impulsion est transmise et reçue toutes les 20 ms. Si l'impulsion d'impulsion est de 1520 µs, cela signifie que le servo variateur est forcé d'occuper la position médiane. Une augmentation ou un changement de l'impulsion fera tourner le servomoteur derrière la flèche ou contre la flèche de la même manière. Dans ce cas, il existe une limite supérieure et inférieure entre l'impulsion. La bibliothèque Servo pour Arduino a les valeurs suivantes pour l'impulsion d'impulsion : 544 µs – pour 0° et 2400 µs – pour 180°.
Veuillez noter que sur votre appareil spécifique, les paramètres d'usine peuvent sembler remplacés par les paramètres standard. Les servomoteurs fournissent une largeur d'impulsion de 760 µs. La position médiane est de 760 µs, comme pour les servos conventionnels, la position médiane est de 1520 µs.
Cela signifie également que c’est plus que simplement pris auparavant. Cependant, au sein d'un même modèle, le servomoteur peut présenter un défaut, ce qui est admis lors des vibrations, ce qui conduit au fait que la plage de fonctionnement des impulsions est légèrement réduite. Pour un fonctionnement précis de la peau, il peut être nécessaire de calibrer un servomoteur spécifique : par expérimentation, il est nécessaire de sélectionner la plage caractéristique correcte de celui-ci.
Si vous voulez vraiment perdre votre respect, alors la terminologie en vaut la peine. Souvent, la méthode de contrôle des servos est appelée PWM/PWM (Pulse width Modulation) ou PPM (Pulse Position Modulation). Ce n'est pas le cas et l'utilisation de ces méthodes peut endommager le lecteur. Le terme correct est PDM (Pulse Duration Modulation). Pour certains, la durée des impulsions est importante et la fréquence de leur apparition n’est pas si importante. 50 Hz n'est pas la norme, mais le servo variateur fonctionne correctement à 40 et 60 Hz. La seule chose dont toute mère a besoin est qu'avec un fort changement de la fréquence des veines, elle puisse fonctionner par à-coups et diminuer la tension, et avec une fréquence forte (par exemple, 100 Hz), elle peut surchauffer et s'éteindre. accorder.
Caractéristiques des servomoteurs
Voyons maintenant ce que sont les servos et quelles sont leurs caractéristiques.
Couple et vitesse de rotation
Parlons maintenant de deux caractéristiques très importantes du servo variateur : couple Et à propos vitesse de rotation.
Le moment de force, ou moment de rotation, est une grandeur physique vectorielle, qui est l'addition traditionnelle du rayon vecteur tiré de l'axe de rotation jusqu'au point de la force rapportée, au vecteur de la force. Caractérise l’action externe d’une force sur un corps solide.

En termes plus simples, cette caractéristique montre à quel point il est important pour un servovariateur de rester calme au cours d'une journée donnée. Étant donné que le couple de rotation du servomoteur est supérieur à 5 kg × cm, cela signifie que le servomoteur est placé sur le vase en position horizontale jusqu'à 1 cm et que 5 kg sont suspendus à l'autre extrémité. Ou, de manière équivalente, il est important d'ajouter 5 cm à 1 kg.
La vitesse du servomoteur varie selon l'intervalle d'une heure nécessaire pour que le servomoteur tourne de 60°. La caractéristique 0,1 s/60° signifie que le servo tourne de 60° en 0,1 s. Il est difficile de calculer la vitesse d'une valeur plus grande, tr/min, mais il arrive que lors de la description des servos, cette unité soit le plus souvent utilisée.
Veuillez noter qu'il faut parfois faire un compromis entre ces deux caractéristiques, car si vous voulez un servomoteur fiable qui peut voir beaucoup de puissance, alors nous devons être préparés pour que l'installation puisse tourner complètement. Et si nous voulons une dynamique très forte, il sera très facile de la retirer de la position d’égalité. Lorsque le même moteur tourne, l'équilibre est déterminé par la configuration des engrenages de la boîte de vitesses.
Bien entendu, nous pouvons désormais utiliser un appareil qui produit beaucoup de douleurs et de maux de tête, afin que ses caractéristiques satisfassent les besoins.
Facteur de forme
Les servomoteurs varient en taille. Et bien qu'il n'existe pas de classification officielle, les fabricants tentent depuis longtemps de déterminer le nombre de tailles disponibles à partir du remodelage couramment utilisé des éléments de fixation. Ils peuvent être divisés en :
petit
standard
La puanteur se profile avec ces dimensions caractéristiques :
Il existe également des servos appelés « types spéciaux » dont les dimensions ne rentrent pas dans cette classification, bien que le nombre de ces servos soit assez faible.
Interface interne
Les servomoteurs sont analogiques ou numériques. Alors, quels sont leurs points forts, leurs avantages et leurs défauts ?
Les sons ne sont affectés par rien : les moteurs électriques, les réducteurs et les potentiomètres sont les mêmes, ils ne sont affectés que par l'électronique interne en céramique. Au lieu d'un microcircuit spécial pour un servomoteur analogique dans un jumeau numérique, vous pouvez installer un microprocesseur sur la carte qui reçoit les impulsions, les analyse et contrôle le moteur. Ainsi, une personne physique a moins de pouvoir dans la manière dont les impulsions sont traitées et traitées par le moteur.

Malheureusement, le servo variateur reçoit toujours les impulsions qu'il contrôle. Après cela, le servomoteur analogique prend la décision de changer de position et envoie un signal au moteur en cas de besoin. Cela sonne à une fréquence de 50 Hz. De cette façon, nous définissons 20 ms – l’heure minimale de réaction. A ce moment, il peut être nécessaire de modifier la position du servomoteur. Mais il n’y a qu’un seul problème. Lorsque le moteur électrique est au repos, aucune tension n'est fournie ; lorsqu'il y a peu de pression sur le moteur électrique, un bref signal de basse tension est envoyé au moteur électrique. Plus il y a d'inspiration, plus le signal est fort. De cette façon, avec de petites entrées, le servomoteur ne peut pas faire tourner rapidement le moteur ou développer un couple élevé. Les « zones mortes » disparaissent en une heure.
Ce problème peut être provoqué par une augmentation de la fréquence de réception, du traitement du signal et du fonctionnement du moteur électrique. Les servomoteurs numériques utilisent un processeur spécial qui reçoit les impulsions de commande, les traite et envoie des signaux au moteur avec une fréquence de 200 Hz ou plus. Il s'avère que le servomoteur numérique est mieux à même de réagir aux entrées externes, ce qui nous permet de développer la vitesse et le couple nécessaires pour tourner, et donc de mieux maintenir la position donnée, ce qui est bien. Bien entendu, dans ce cas, davantage d’électricité est utilisée. De plus, les servos numériques sont pliables lors de la fabrication et coûtent donc beaucoup plus cher. Eh bien, juste deux défauts – tous les inconvénients que présentent les servos numériques. D'un point de vue technique, les servos analogiques peuvent facilement être dépassés.
Matériaux d'engrenage
Les engrenages des servos sont constitués de divers matériaux : plastique, carbone, métal. Tous sont très variés, en fonction de la tâche spécifique et des caractéristiques requises pour l'installation.

Les engrenages en plastique, le plus souvent en nylon, sont très légers, peu sensibles à l'usure et sont plus larges dans les servos. Les odeurs n'affectent pas les grands avantages, mais comme les avantages sont transférés aux petits, les engrenages en nylon sont le meilleur choix.
Les engrenages en carbone sont plus durables et ne s'usent pratiquement pas par rapport à ceux en nylon. Le principal défaut est la route.
Les engrenages métalliques sont les plus importants, ils protègent contre les odeurs et garantissent une attention maximale. Si vous êtes suffisamment fatigué, vous devrez changer de vitesse presque à chaque saison. Les engrenages en titane sont les préférés parmi les engrenages en métal, tant en termes de caractéristiques techniques que de prix. Malheureusement, la puanteur vous coûtera cher.
Moteurs collecteurs et brushless
Il existe trois types de servomoteurs : un moteur de base avec noyau, un moteur sans noyau et un moteur sans balais.

Le moteur primaire avec noyau (droitier) possède un rotor coulissant puissant avec un enroulement fin et des aimants autour de lui. Le rotor a une section tournante, donc lorsque le moteur tourne, le rotor fait vibrer une petite oscillation du moteur lorsque la section passe à travers l'aimant, et par conséquent, un servomoteur sort qui vibre et est moins précis qu'un servomoteur. avec un moteur sans noyau. Un moteur à rotor vide (gaucher) déplace un seul noyau magnétique avec un enroulement en forme de cylindre ou d'anneaux autour d'un aimant. La conception sans noyau est légère et ne comporte aucune section, ce qui permet un fonctionnement plus fluide et sans vibrations. Ces moteurs sont plus chers, mais ils offrent un niveau de contrôle, de couple et de vitesse plus élevé que les moteurs standard.

Les servomoteurs avec moteurs brushless sont récemment apparus. Les avantages sont les mêmes que dans les autres moteurs brushless : il n'y a pas de balais, ce qui signifie qu'ils n'endommagent pas le support de l'enveloppeuse et ne s'usent pas, la fluidité et le couple sont supérieurs à ceux des moteurs brushless. Les servomoteurs équipés d'un moteur sans balais sont les servomoteurs les plus chers, qui offrent de meilleures performances que les servomoteurs équipés d'autres types de moteurs.
Connexions à Arduino
De nombreux servos peuvent être connectés directement à Arduino. Pour quel type convient un train de trois fléchettes :
chervoniy - taverne; se connecter au contact 5V ou directement à la ligne de vie
marron ou noir – terre
jaune ou blanc – signal ; se connecte à la sortie numérique Arduino.
Pour connecter Arduino, il sera facile d'utiliser une carte d'extension de port, telle que Troyka Shield. Si vous le souhaitez avec quelques fils supplémentaires, vous pouvez connecter le servo via la maquette ou directement aux contacts Arduino.
Vous pouvez générer vous-même des impulsions laser, mais avec une gamme de paramètres plus large, la bibliothèque Servo standard est utilisée pour plus de simplicité.
Taverne Obejennya
Le servomoteur Hobi principal maintient plus de 100 mA pendant le fonctionnement. Lorsque vous utilisez Arduino, vous pouvez voir jusqu'à 500 mA. Si vous devez installer un servomoteur étanche dans votre projet, vous devriez penser à le voir dans le circuit à partir de matériel supplémentaire.
Jetons un coup d'œil à la connexion bout à bout du servo variateur 12V : 
Considérez le nombre de servos connectés.
Sur la plupart des cartes Arduino, la bibliothèque Servo prend en charge le contrôle de 12 servos maximum, sur l'Arduino Mega, ce nombre passe à 48. Cependant, il y a un petit effet secondaire de la bibliothèque : et vous ne travaillez pas avec un Arduino Mega, il devient fastidieux d'utiliser la fonction analogWrite() sur les contacts 9 et 10, indépendamment du fait que le servomoteur soit connecté à l'un ou l'autre contact. Sur l'Arduino Mega, vous pouvez connecter jusqu'à 12 servos sans perturber la fonctionnalité PWM/PWM ; si vous disposez d'un grand nombre de servos, vous ne pouvez pas utiliser analogWrite() sur les broches 11 ou 12.
Fonctionnalité de la bibliothèque Servo
La bibliothèque Servo vous permet de programmer des servomoteurs. Pour cela, passez au type Servo. Le contrôle implique les fonctions suivantes :
attach() - ajoute une modification à une broche spécifique. Il existe deux options de syntaxe pour cette fonction : servo.attach(pin) et servo.attach(pin, min, max). Dans ce cas, pin est le numéro de la broche à laquelle arrivera le servo variateur, min et max sont le nombre maximum d'impulsions en microsecondes correspondant à un tour de 0° et 180°. Pour le nettoyage, les valeurs sont égales à 544 μs et 2400 μs de façon constante.
write() - commande au servo variateur d'accepter la nouvelle valeur du paramètre. Syntaxe avancée : servo.write(angle) , où angle est la direction dans laquelle le servo peut tourner.
writeMicroseconds() - envoie une commande pour envoyer une deuxième impulsion au servo, qui est l'analogue de bas niveau de la commande avant. Syntaxe avancée : servo.writeMicroseconds(uS) , où uS est l'impulsion supplémentaire en microsecondes.
read() - Lit plus précisément les valeurs du compartiment dans lequel se trouve le servo variateur. Syntaxe avancée : servo.read() fait pivoter la valeur entière de 0 à 180.
attachment() - vérification que la valeur attachée est remplacée par une broche spécifique. Syntaxe des attaques : servo.attached() , la vérité logique tourne, si le changement a été pleinement consommé, ou si le mensonge est dans la dernière phase.
detach() - effectuez le travail, inversez l'action attach() , afin que la modification soit effectuée à partir de la broche à laquelle elle a été attribuée. Syntaxe de détachement : servo.detach().
Toutes les méthodes de la bibliothèque Servo2 sont basées sur les méthodes Servo.
Bout de la bibliothèque Servo
Remplacement
Les servomoteurs existent en différentes variétés, certains sont meilleurs, certains sont moins chers, certains sont plus fiables, certains sont plus précis. Et avant d'acheter un servo variateur, assurez-vous qu'il possède de meilleures caractéristiques, afin qu'il soit adapté à votre projet. Bonne chance dans vos efforts!
Servomoteur (entraînement pour la couture)- Conduisez vers Keruvannyams via un lien de passerelle négatif, qui vous permet de contrôler avec précision les paramètres du rukhu.
Service d'un tel type d'entraînement mécanique (attachant, timide à l'orgue), pu.Maja, le fareer (position, shvidkosti, zusill Toshcho) je contrôle le contrôle (circuit Elektronna sur le système) et paramètre automatique sur le datcha Oui, sur l'appareil) jusqu'à la valeur externe spécifiée (position du bouton de commande ou valeur numérique dans d'autres systèmes).
Matériel de Wikipédia - l'encyclopédie gratuite
Le servomoteur est un système d'entraînement qui, sur une large plage de contrôle de fluidité, assure des processus dynamiques de haute précision et assure leur bonne répétabilité. Ce système est conçu pour produire du couple, de la fluidité et de la position avec une précision et une dynamique données. Classique servomoteur se compose d'un moteur, d'un capteur de position et d'un système de contrôle doté de trois circuits de contrôle (position, vitesse et débit).
Le mot « servo » est similaire au mot latin « servus », qui signifie serviteur, esclave, assistant. Dans les salles des machines, il était important de disposer d'entraînements supplémentaires (entraînements d'entraînement sur les établis, entraînements de robots, etc.). Cependant, aujourd'hui, la situation a changé, les entraînements de tête sont désormais réalisés à l'aide de la technologie servo.
À cette heure, servos Il y a là un problème, car la précision de la régulation des principaux convertisseurs de fréquence industriels est insuffisante. Zastosuvannya très acide servomoteurs nécessaire pour une installation hautement productive, où la productivité est le critère principal. Servomoteursêtre équipé de systèmes de précision pour maintenir la fluidité et le positionnement des robots industriels et des machines de haute précision. ServomoteurÉgalement installé sur des bancs de perçage avec gabarit, sur divers systèmes de transport technologiques, sur divers mécanismes auxiliaires, etc. servos.
Universel servomoteur
Universel servomoteur caractérisé par un riche ensemble de fonctions, la capacité de contrôler des servomoteurs de différents types (à la fois synchrones et asynchrones), la capacité de fonctionner avec différents capteurs de portail, ainsi que la disponibilité d'un certain nombre d'options et d'extensions. Apparemment universel Servomoteur sur le KEB F5-Multi (Nimechchina) et Control Techniques Unidrive SP. (Angleterre)
Servomoteur basé sur KEB F5-Multi
Servo variateur KEV" align="RIGHT" width="20%" border="0">Contrôleur d'entraînement électrique avec circuit de porte pour moteurs synchrones et asynchrones. Spécialement conçu pour un fonctionnement en boucle fermée, variantes possibles de raccordement en boucle :
résolveur
encodeur
Capteur de position Sin-Cos
capteur de position absolue
EnDat, Hiperface ou dynamo tachymétrique
Principales caractéristiques et caractéristiques :
large gamme de pressions
tension 220 ou 380 V
Il est possible de vivre avec un flux constant
moteur keruvannya sans capteur
Entrées/sorties analogiques et numériques isolées galvaniquement
relais et sorties programmées à transistors
Il est possible de mettre en œuvre le concept de chauffage décentralisé avec un système de motorisation, évidemment :
régulation de la vitesse et du couple
contrôle de position
modes d'emballage étroits
Remixeurs de cames
Disque à came électronique
Positionnement sur un seul axe
Position de la table rotative
Tous les variateurs prennent en charge les dernières interfaces Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet et KEB-HSP5/DIN 66019-II.
Vikonavchy et spécial Servomoteur
Le servomoteur final fonctionne sous le contrôle du contrôleur, permettant la sélection de fonctions et de réglages simples pour le robot. Par conséquent, le servomoteur final est plus économique. Jetons un coup d'œil au Vikonau Servomoteur sur la crosse du synchrone servomoteurs Mécapion.
Servomoteur Mécapion

Synchrone Servomoteur Mecapion (ex. Metronix) est un produit de base pour les solutions système d'automatisation industrielle, connu depuis longtemps des travailleurs russes.
Caractéristiques principales servomoteurs Métronix
plage de pression de 0,03 à 11 kW
Incorporation d'un kit récupérateur, qui permet de restituer l'énergie, et incorporation d'une clé pour décharger l'énergie pendant la galvanisation dynamique
mode de test du réglage robotique de la fréquence
Les fonctions de réduction des vibrations à la mise sous tension du moteur et de son moyeu permettent d'allumer le robot en changeant la fréquence en mode colival aussi bien lors de la mise en service que pendant le fonctionnement
Possibilité d'utiliser des capteurs de position incrémentaux absolus et absolus
sélectionnez le mode du système de contrôle du robot - contrôle de la vitesse ou du couple
La présence d'un progiciel étendu vous permet de modifier facilement et rapidement les fonctions du variateur de fréquence et de fonctionner sur sa base à partir d'une variété d'exigences techniques (y compris la mise en œuvre du contrôle des entraînements d'alimentation)
La présence de moteurs à arbre vide dans la gamme de produits Metronix permet d'allumer le dispositif intermédiaire - un accouplement adapté - à l'aide de schémas cinématiques
Les sorties programmées permettent aux systèmes de fonctionner avec un niveau de protection élevé dans diverses situations d'urgence et avec un contenu d'information maximal pour l'opérateur.
La série VS est un allumeur standard qui met en œuvre le contrôle de la vitesse, du couple (±10 V) et de la position (pas/dir).
Les fréquences de conversion de la série VS peuvent être utilisées dans les modes suivants :
changer la position à l'aide d'un contrôleur externe, qui définit la séquence d'impulsions.
Fournit un fonctionnement à grande vitesse sur une entrée analogique ou des entrées discrètes.
Contrôle du couple de l'entrée analogique en mode d'échange de couple maximum.
Keruvannya swidkіst/position.
keruvannya avec vitesse/instant.
position/moment keruvannya.
La série spéciale VP est destinée à des tâches spéciales :
Positionnement par coordonnées linéaires avec un choix jusqu'à 64 positions, six entrées discrètes (VP1), champ d'application typique - garantissant un mouvement linéaire dans les systèmes avec transmission sur vis à billes
positionnement actuel avec possibilité de sélectionner jusqu'à 32 positions, cinq entrées discrètes (VP2), zones de stockage typiques - tables rotatives, lignes de convoyeurs rotatifs, dispositifs de changement automatique d'outils, etc.
Posito -Inuvannia au Vikoristannami du subsidaguban (VP3), sphère Typov de la fixation - machine d'emballage, vylyaki Vida Zelevyv, chiot les senunshuns pour le signal du zenkoder sur la valve du Dvigun, donc pour le sujet
Positionnement programmable avec la possibilité de sélectionner jusqu'à 8 programmes avec trois entrées discrètes (VP5), chaque programme peut avoir jusqu'à 100 positions (positions), qui sont stockées dans la mémoire d'inversion de fréquence
Pour relier la conversion des fréquences VS et un ordinateur personnel (industriel), on utilise un port COM ; si nécessaire, grâce à un convertisseur RS232/RS485, les fréquences de conversion peuvent être combinées
Intégrations Servomoteur
align="DROITE" width="30%" border="0">Le principal riz végétal, ainsi que le produit le plus important, intégré servomoteurє moteur, contrôleur, capteur de portail et inverseur de fréquence dans un seul boîtier. En réduisant au minimum les opérations d'installation, cela simplifiera la connexion et la configuration, accélérera le temps de travail, économisera considérablement de l'espace et aura également un effet positif sur la productivité. servomoteur.
Sur le marché russe, ils ont déjà réussi à se montrer aimables et à recommander l'intégration intérieure de la Fédération de Russie. Servomoteur SP.S.
contrôle intemporel (vecteur) basé sur un algorithme adapté aux moteurs temporels
performances dynamiques élevées pour le débit des circuits fermés pour la régulation des débits dans les enroulements du moteur
Vikoristana des boucles fermées de fluidité
faibles vibrations pour le cadre zusilla, qui est ajusté dynamiquement
conception réfléchie et installation facile
taille compacte et petit poids
Modes robots servomoteur SPS
Dynamique - le signal du contrôleur de niveau supérieur est transmis via une interface numérique en temps réel. Le mode dynamique est utilisé dans les systèmes nécessitant un alignement de contours (par exemple, des manipulateurs avec cinématique de pliage et tables de coordonnées pour un positionnement précis).
Analogique - contrôle avec un signal haute vitesse de ±10 V. Ce mode vous permet d'utiliser le variateur pour mettre à niveau le contrôle avec des systèmes de contrôle analogiques ou de le contrôler manuellement (par exemple, derrière un volant supplémentaire).
Cyclique - affiche les opérations cycliques programmées par le contrôleur du niveau supérieur et les économies dans la mémoire du lecteur. Cela vous permet souvent de désactiver le contrôleur externe du niveau supérieur du système de contrôle. Le mode cyclique est utilisé, par exemple, sur les convoyeurs et dans les opérations difficiles d'entrepôt.
Marzed - ce mode permet de diviser le système en différentes divisions du système d'asservissement basé sur l'interface numérique CAN, pour mettre en œuvre des mouvements synchrones ou séquentiels de plusieurs axes. Dans ce cas, il est également possible d'utiliser le mode « maître-esclave », dans lequel le variateur fonctionne dans la position répétitive de l'arbre de transmission.
Dans la conception des équipements quotidiens, créés sur la base de hautes technologies, divers processus automatiques se développent et se perfectionnent progressivement. Parmi eux se trouve un servomoteur de grande largeur, installé en utilisant la méthode d'interaction avec des éléments et des parties adjacents d'entraînements à dynamique constante. Ces dispositifs assurent un contrôle constant des angles de rotation de l'arbre et établissent la fluidité nécessaire des dispositifs de type électromécanique.
La partie stockage de ces systèmes est constituée de servomoteurs, qui permettent le mouvement des fluides dans la plage requise à des moments précis. Ainsi, tous les processus et processus peuvent être répétés périodiquement et la fréquence de ces répétitions est définie dans le système de contrôle.
Fixation au servomoteur
Les principales pièces qui composent un servomoteur typique sont le rotor et le stator. Pour la commutation, des composants spéciaux sont installés sous forme de fiches et de boîtes à bornes. La gestion, le contrôle et la correction des processus s'effectuent à l'aide d'un nœud central à proximité. Pour renforcer et amortir le servomoteur, le système est vicorisé. Toutes les pièces sont situées dans l'enceinte.
Presque tous les servos disposent d'un capteur qui traite et surveille des paramètres importants, tels que la position, la force ou la vitesse d'enroulement. L'unité de chauffage supplémentaire prend en charge le mode automatique des paramètres nécessaires lors du fonctionnement de l'appareil. Le choix de l'un ou l'autre paramètre se fait en fonction des signaux provenant du capteur à intervalle d'une heure.
La différence entre le servomoteur et le moteur électrique primaire dépend de la capacité à installer l'arbre dans une position précisément spécifiée, mesurée en degrés. La position réglée, ainsi que d'autres paramètres, sont pris en charge par l'unité de commande.
Leur principe de fonctionnement repose sur la conversion de l'énergie électrique en énergie mécanique, grâce à un moteur électrique supplémentaire. En tant qu'entraînement, une boîte de vitesses est utilisée, ce qui permet de réduire la fluidité du remontage à la valeur requise. Les arbres à engrenages entrent dans l'entrepôt et transmettent le couple.
Comment fonctionne un servo variateur ?
L'enroulement de l'arbre de sortie de la boîte de vitesses, relié par des engrenages au servomoteur, est responsable du démarrage du moteur électrique. La boîte de vitesses elle-même nécessite une régulation du nombre de tours. L'arbre de sortie peut être connecté à des mécanismes et des dispositifs nécessitant une réparation. La position de l'arbre est contrôlée par un capteur d'arrêt supplémentaire, conçu pour convertir les signaux électriques autour du virage et sur lequel le principe de fonctionnement de tout appareil est déterminé.

Ce capteur de tension est également appelé codeur ou potentiomètre. Lorsque vous tournez le curseur, ses supports changeront. Changez le support pour qu'il soit en position proportionnelle directe avec le tour de l'encodeur. Ce principe de fonctionnement permet d'installer et de fixer les mécanismes dans la position souhaitée.
De plus, le servomoteur contient une carte électronique qui génère des signaux externes sous la forme d'un potentiomètre. Ensuite, les paramètres sont ajustés, dont les résultats sont suivis du démarrage du moteur électrique. De plus, l’utilisation du paiement électronique entraîne une pénalité négative.

Vous pouvez connecter le servomoteur à l'aide de trois conducteurs supplémentaires. Deux d'entre eux assurent la vie du moteur électrique et le troisième est utilisé pour transmettre des signaux de commande pour entraîner l'arbre dans la position souhaitée.
Il est possible d'éviter la pression dynamique surnaturelle sur le moteur électrique à l'aide d'une accélération douce ou d'une galvanisation tout aussi douce. C'est pourquoi des microcontrôleurs pliables sont utilisés pour assurer un contrôle et un contrôle de position plus précis de l'élément de travail. Par exemple, vous pouvez diriger le disque dur de l'ordinateur vers l'endroit où les têtes sont installées dans la position requise à l'aide d'un lecteur de précision supplémentaire.
Contrôle du servomoteur
La principale raison pour laquelle le servomoteur fonctionne normalement réside dans son fonctionnement entièrement avec le système dit G-code. Ces codes sont un ensemble de commandes de contrôle et de paramètres pour un programme spécial.
Si nous prenons la CNC comme commande numérique, alors dans ce cas, les servos interagissent avec. Il est nécessaire de modifier les valeurs de tension sur l'enroulement d'alarme ou l'induit du moteur électrique au niveau de la tension d'entrée.

Le contrôle direct du servomoteur et du système s'effectue à partir d'un seul endroit : l'unité de commande. Lorsqu'une commande est émise pour déplacer la piste le long de l'axe de coordonnées X, une tension de la valeur de la piste apparaît dans le commutateur numérique-analogique, qui est nécessaire pour fournir au variateur cette coordonnée. Le servomoteur commence par un rotor extérieur de la vis mobile, relié à l'encodeur et au bouton du mécanisme principal.
Les impulsions vibrent dans l'encodeur, qui est pris en charge par le bloc qui contrôle le servomoteur. Le programme contient une variété de signaux provenant de l'encodeur installé dans la station, qui peuvent passer par le mécanisme final. À l'heure requise, le convertisseur analogique, après avoir rejeté la force d'impulsion réglée, accepte la tension de sortie, ce qui entraîne la compression du servomoteur. Ainsi, juste sous l'afflux d'impulsions, la tension est renouvelée et le fonctionnement de l'ensemble du système est renouvelé.
Voir les caractéristiques
Les servomoteurs sont disponibles dans une variété d'options, leur permettant d'être utilisés dans une variété de domaines. Les structures principales sont divisées en un collecteur et sont conçues pour fonctionner comme un flux permanent et variable.
De plus, le servomoteur peut être synchrone ou asynchrone. Les dispositifs synchrones peuvent régler la vitesse d'enroulement de haute précision, ainsi que la vitesse de rotation et d'accélération. Ces entraînements augmentent rapidement la vitesse nominale de l'enrubanneuse. Les servomoteurs dans un circuit asynchrone sont contrôlés en modifiant les paramètres du circuit lorsque sa fréquence est modifiée par un onduleur supplémentaire. Ils vitrifient avec une grande précision la fluidité du vent spécifiée pour les enveloppeuses les plus basses.

Selon le schéma de principe et la conception, les servomoteurs peuvent être électromécaniques ou électrohydromécaniques. La première option, qui comprend une boîte de vitesses et un moteur, a une faible vitesse. Dans un autre cas, l'action est encore plus forte que celle du piston dans le cylindre.
Le servo variateur est caractérisé par les paramètres suivants :
- Le moment de torsion ou zusilla qui se produit sur l'arbre. Respecté comme l'indicateur le plus important du servomoteur robotique. Pour la valeur de tension cutanée, le moment de puissance de torsion est utilisé, qui est affiché dans le passeport du virus.
- Flexibilité pour tourner. Ce paramètre représente la période de temps pendant laquelle il est nécessaire de modifier la position de l'arbre de sortie à 600. Cette caractéristique dépend également de la valeur de tension spécifique.
- L'angle de rotation maximum que l'arbre de sortie peut tourner. Le plus souvent, cette valeur est de 180 ou 3600.
- Tous les servos sont divisés en numériques et analogiques. La commande des servomoteurs y est étroitement liée.
- Durée de vie des servomoteurs. La plupart des modèles ont des tensions allant de 4,8 à 7,2 V. La vie et la gestion se déroulent avec l'aide de trois guides.
- Possibilité de mise à niveau vers un servomoteur à enroulement permanent.
- Les matériaux de la boîte de vitesses peuvent varier. Les engrenages sont fabriqués en métal, carbone, plastique ou matériaux composites. Chacun d’eux a ses propres succès et inconvénients. Par exemple, les pièces en plastique sont peu exposées aux chocs, mais résistent à l'usure lors d'une utilisation régulière. Cependant, les engrenages métalliques s'usent rapidement, puis l'odeur développe une grande résistance à l'intensité dynamique.
Avantages et inconvénients des servomoteurs
Grâce à leurs dimensions unifiées, ces appareils peuvent être installés facilement et simplement dans n'importe quelle structure. L'odeur est silencieuse et fiable, leur peau fonctionne pratiquement silencieusement, ce qui est d'une grande importance lorsqu'ils sont utilisés sur des parcelles pliantes et similaires. Avec des vitesses faibles, vous pouvez obtenir des mouvements précis et fluides. Le servomoteur peut être réglé par le personnel, en fonction des spécifications.
Comme les défauts sont indiqués, la complexité de la chanson une fois ajustée et une variété tout aussi élevée.