درایو سروو - چیست؟ چگونه با دست خود سروو درایو بسازیم و وصل کنیم؟ سروو موتور چه کار می کند و چگونه کار می کند سرووهای الکتریکی.
اتصال دروازه توسط یک درایو سروو یا "چکشیده شده در پیچ" هدایت می شود.
- وبلاگ شرکت آمپرکا
سلام به همه سازندگان habra!
فکر بی فکری به ذهنم رسید: وسیله ای تهیه کنید که بتوان از آن برای چکش زدن در پیچ استفاده کرد. فقط به خاطر نشان دادن درایو سروو ربات. الگوریتم ساده است: ما دستور می دهیم چکش را بالا بیاوریم، بررسی کنیم تا بلند شود و چکش را رها کنیم. و تا زمانی که گلها ذبح شوند. چگونه می توانید بدون آسیب رساندن به سنسورهای اضافی متوجه شوید که چکش در حال حرکت است یا مسدود شده است؟ درایو سروو "بد" را روشن کنید! نحوه کسب درآمد از طریق آمار موجود است.
سروو درایو چیست؟ شما به تنهایی همه چیز را می دانید، اما در مورد هر مشکلی: به همین دلیل است که وقتی یک موتور ثابت جایگزین می شود، جریان به سادگی نمی چرخد در حالی که ولتاژ تامین می شود، بلکه در عوض به یک نقطه معین می چرخد و در آن موقعیت قرار می گیرد. مدار پشت یک سیگنال PWM اضافی نصب شده است. سروو درایو اردوگاه خشمگین نیز مقصر دانستن قدرت آن است. قبل از شروع لپه، به این باور رسیدم که تغذیه محصول فعلی از جعبه ساده تر و کارآمدتر است. اینطور نیست. بیایید در مورد همه چیز به ترتیب صحبت کنیم.
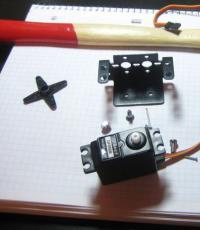
خوب، یک وسیله جانبی فال: یک سروو درایو با چکشی که روی یک پایه کوچک به آن وصل شده است تا هم تراز شود. سروو درایو از طریق IO Shield به آردوینو متصل می شود و میکروکنترلر الگوریتم را پیکربندی می کند:
- درایو سروو را برای بلند کردن چکش نصب کنید
- تا زمانی که درایو سروو به شما بگوید چه چیزی به دست آمده است، اقدام نکنید
- درایو سروو را روشن کنید و بگذارید چکش روی بازوها بیفتد
- متن را در موقعیت صحیح بخوانید، آنچه افتاده است
- اگر نخ پس از چندین بار افتادن تغییر نکرده باشد، به این معنی است که نخ مسدود شده است. ظاهراً شراب مسدود شده است - فرض بر این است که
- وقتی همه چیز تغییر کرد، دوباره شروع می کنیم

اره و نورد:

بیایید شروع به نوشتن سیستم عامل برای آردوینو کنیم. مشخص می شود که نصب کوت آواز برای سرو ایرادی ندارد. Zocrema، که به شما امکان می دهد یک کتابخانه Servo استاندارد ایجاد کنید، که یک سیگنال PWM خروجی را از مقدار مشخص شده در درجه تشکیل می دهد. و مشکل اصلی برای خوانندگان این است: هیچ عملکردی برای این وجود ندارد.
شویدکو با جستجوی مشکل در گوگل، اطلاعات زیادی در انجمن ها پیدا کرد، جایی که آنها به طور معتبر تأیید کردند: این غیرممکن است! درایوهای سروو دستگاههای فقط نوشتنی هستند.» من را ناراحت نکرد، من به طور شهودی احساس کردم که دستیابی به این داده ها به سادگی امکان پذیر است.
ماچاسینا
پس از چند شوخی اخیر، می توانید متوجه شوید که سرور چگونه کنترل می شود. این موتور اصلی یک جریان ثابت است که از طریق یک آتل چرخ دنده که دنده پایینی را تشکیل می دهد به دوک خروجی متصل می شود. همین دوک از داخل به طور فیزیکی به پتانسیومتر (مقاومت تنظیم) متصل است. هنگامی که موتور روشن می شود، اسپیندل می چرخد، لغزنده پتانسیومتر می چرخد، ولتاژ خروجی پتانسیومتر تغییر می کند، ولتاژ پتانسیومتر خوانده می شود و ولتاژ به سطح مشخص شده رسیده است - به مقدار رسیده است، موتور می چرخد. در شناسه زندگیسپس با استفاده از یک پتانسیومتر می توانید برش جریان پشت سیگنال را تعیین کنید. دیگر امکان روشن کردن درایو سروو و اتصال به محل مورد نیاز وجود نداشت. بیایید نگاهی بیندازیم به:

من فوراً به شما می گویم که در طول فرآیند تجزیه و تحلیل، درایو سروو را به طور غیرقابل برگشتی از عکس شکستم. نیازی به جدا کردن برد از روی لوازم الکترونیکی نبود، فقط باید قاب پشتی که روی 4 پیچ قرار می گیرد را جدا کنید. بلافاصله مشخص نبود و برای اینکه بفهمیم پتانسیومتر در کجای تخته لحیم شده قرار دارد، مجبور شدیم یک درایو را قربانی کنیم.
محور به عنوان یک پتانسیومتر لحیم شده روی سرووها در DFRobot:

ما به سیگنالی از نوار لغزنده نیاز داریم که هنگام چرخش بین حداقل و حداکثر کشش تغییر کند. یک مولتی متر می گیریم، دوک را به اطراف می چرخانیم و می بینیم: کدام مدارها کدام سیگنال را نشان می دهند. برای سرویس من، ولتاژ 0.43 مربوط به چرخش 0 درجه است و ولتاژ 2.56 ولت مربوط به حداکثر چرخش 180 درجه است.
سیم سیگنال جدید را با دقت لحیم کنید.

ما آن را به ورودی آنالوگ A5 در آردوینو وصل می کنیم. درب را می بندیم. ما برنامه را می نویسیم:
#عبارتند از
آن را روشن کنید، آن را امتحان کنید، آن را امتحان کنید!
با چه چیزی باید کار کرد، بدون بحث بیشتر، گزینه های زیادی وجود دارد: می توانید یک کنترل کننده بر اساس آنچه در کشتی ها برای تنظیم نیروی رانش استفاده می شود ایجاد کنید (عقب/عقب). می توان از سروو با اتصال دروازه به عنوان عنصری از کنترل کرما مستقل هر ماشینی استفاده کرد. خیلی چیزها ممکن است باشد که فانتزی شما با ما بیاید!
درایو سروو(lat.servus - خدمتکار، دستیار؛ بیاورید، چه بخیه بزنید)- از طریق کرووان رانندگی کنیدپاسخ به تماس منفی ، که به شما امکان می دهد پارامترهای roc را دقیقاً تنظیم کنید.
سروو درایو بیشتر در رباتیک استفاده می شود. بدون آن غیرممکن است، به خصوص وقتی صحبت از حرکت دقیق اقلام و اشیاء باشد. این مشکل با گذشت زمان با تخریب هر نوع کار مکانیکی (تهیه، جوشاندن، آسیاب کردن، جابجایی محصولات روی نوار نقاله و غیره) به وجود می آید. چنین روبات هایی باید دستکاری هایی داشته باشند که شبیه دست های مکانیکی هستند. Vlasna، رباتیک صنعتی معروف که در سراسر جهان برای اتوماسیون تولید استفاده می شود، در مقابل دستکاری کنندگان به ما ارائه می شود. و هیچ یک از این دستکاری کننده ها نمی تواند بدون درایوهای سروو که به یکدیگر متصل هستند کار کند. چرا؟
همه چیز در سمت راست توسط درایو سروو کنترل می شود. سروو درایو درایوی است که در آن یک پیوند بازخورد منفی ایجاد می شود که امکان کنترل دقیق پارامترهای محور درایو (اغلب شفت خروجی) را فراهم می کند. برای ایجاد چنین دروازه ای باید از سنسور موقعیت فانوس خروجی سروو درایو استفاده کنید یا ممکن است سنسورهای سیالیت، سنسورهای نویز و غیره نیز متصل باشند. به نظر می رسد آویزان یا در آهنگ موقعیت می چرخد. این موقعیت نصب شده و "بررسی" می شود تا زمانی که دستور تغییر موقعیت پیدا شود. به عنوان مثال، یک سیگنال ارسال می شود که شفت در موقعیت گوشه 90 درجه نصب شده است. شفت در موقعیت خود می چرخد و تا زمانی که سیگنالی در مورد موقعیت جدید می رسد کوتاه می شود. چنین احتمالاتی به طور جدی روی درایو سروو موتور دنده اولیه تأثیر می گذارد که تا زمانی که ولتاژ به آن اعمال می شود نمی تواند به طور مداوم بچرخد. در نتیجه، اگر رباتی مجهز به چنین درایوهایی باشد، می تواند مانند دست انسان فرو بریزد و ربات قابل نابودی را از بین ببرد.
انواع مختلفی از سرو درایوها در صنعت وجود دارد که در این مقاله به سروو درایوهای برقی در صنعت عمومی می پردازیم. به بیان ساده، چنین سرووهایی دارای شفتی هستند که دور آن ها می پیچد. برای سادگی، ما به دستگاه SG-90 hobi-servo drive (شکل 1) نگاه خواهیم کرد که به طور فعال برای ایجاد مدل های اولیه ربات ها و مکانیسم های دیگر که پرواز یا پرواز می کنند استفاده می شود. درایو هوبی سروو، برخلاف صنعتی، از نظر اندازه کوچکتر است، نیروی کمتری ایجاد می کند، در غیر این صورت محافظت می شود و در اصل کاملاً مشابه همتای صنعتی خود است.
مالیونوک 1
دستگاه برای درایو هوبی سروو در کوچک 2 نشان داده شده است. این انبار شامل یک موتور الکتریکی، یک جعبه دنده با مجموعه ای از چرخ دنده ها، یک پتانسیومتر (که عملکرد سنسور موقعیت را برای اتصال برگشت تغییر می دهد)، یک برد کنترل الکترونیکی است. برای موتور الکتریکی و محفظه ای که کل ظرفیت را در خود جای دهد بر اساس چه نشانههای کوچکی انجام میدهید، برای زندگی و دنبال کردن با چه نوع درایو سروو نیاز دارید؟ از 3 سیم تشکیل شده است: سیم "بعلاوه"، سیم "منهای" و سیمی که سیگنالی را ارسال می کند که آن را کنترل می کند. در مدل های مختلف اجاق گاز، دارت ممکن است رنگ های متفاوتی داشته باشد. عملی است که ابتدا عمر «بعلاوه» رنگهای قرمز را انجام دهید و عمر «منهای» را برای رنگهای سیاه انجام دهید. هیچ استاندارد رنگ واضحی برای دارت سیگنال (برای انتقال سیگنال رنگی) وجود ندارد. برای برخی از درایوهای سرو، سیم سیگنال ممکن است سفید، نارنجی یا قهوه ای باشد.

مالیونوک 2
برای keruvannya چنین موتورهایی استاندارد سیگنال keruyuchy را اتخاذ کردند. این شامل تکانه های تکراری پیوسته و همانطور که می گوییم تکانه های کم است (شکل 3). فرکانس این پالس ها به تدریج ثابت می شود و به 50 هرتز می رسد. بیا بیرون، ساعت چند است؟پالسها (ساعت بین لبههای جلویی پالسهای رگ) روی 1 ثانیه/50 = 0.02 ثانیه و سپس 20 میلیثانیه تنظیم میشوند.

مالیونوک 3
آنچه مهم است این است که موقعیت شفت خروجی درایو سروو با قدرت پالسی که عرضه می شود تعیین می شود. برای روشن شدن، کوچک 4 رابطه تقریبی بین عرض پالس در مختصات ساعت و جهت چرخش محور محرک سروو را نشان می دهد. کنترل چرخش محور درایو سروو در معرض پالس های اضافی با فرکانس 1 تا 2 میلی ثانیه (میلی ثانیه) است.

مالیونوک 4
همانطور که از نمودار مشاهده می شود، برای کنترل درایو سروو، چیزی بیش از یک سیگنال از مدولاسیون عرض پالس - PWM استفاده نمی شود. از آمار زیر در وب سایت ما می توانید متوجه شوید که این PWM چیست.
و چگونه عرض پالس به شفت خروجی تبدیل می شود؟
همانطور که به کودک 2 اختصاص داده شده است، محفظه درایو سروو دارای یک ماژول کنترل الکترونیکی موتور دیگر است. سیگنال ارسال شده به درایو سرو روی برد گم می شود. و محوری که توسط این سیگنال تولید می شود در بلوک دیاگرام baby 5 نشان داده شده است که گام به گام آن را تحلیل می کنیم. مرحله پوست با راست روده یا دایره و شماره گذاری شده است. در وسط این تصاویر مستقیم پوستی دستگاه هایی قرار دارند که سیگنال در آنها پردازش می شود.

مالیونوک 5
همچنین سیگنال کنترل ورودی SP با مدولاسیون PWM به یک ریزمدار ویژه با عناصر منطقی می رسد که سپس به ولتاژ Upr (مرحله شماره 1) تبدیل می شود. پس از این سیگنال Ucontrol (ولتاژ هسته) عنصر یکسان سازی ولتاژ پیدا می شود. این عنصر جمع کننده نامیده می شود اما در واقع از سیگنال ورودی Ucontrol یک ولتاژ Urev (ولتاژ برگشت) تولید می کند که از اتصال برگشتی از مقاومت مبادله عبور می کند (مرحله شماره 2).
ولتاژ Ucorr (ولتاژ اصلاح پذیر) که خارج شده است توسط بوستر (مرحله شماره 3) وارد عمل شده و به موتور الکتریکی عرضه می شود. موتور به دور خود می چرخد (مرحله شماره 4) و شفت خروجی را به سمت درایو سرو و در عین حال سنسور چرخش را به صورت پتانسیومتر هدایت می کند. با چرخاندن دسته پتانسیومتر، ولتاژ تغییر می کند و خارج می شود، به طوری که چرخش شفت به ولتاژ Urev تغییر می کند (مرحله شماره 5). این ولتاژ U (مرحله شماره 2) با ولتاژ Ucontrol یکسان می شود و به محض اینکه به بوستر (مرحله شماره 3) و غیره برگردیم اختلاف ظاهر می شود. سیگنال این است که با لانست از مفصل یقه "راه بروید" تا ساعتی که رابطه پایان می یابد Ucontrol = Urev. سپس شتاب برابر با 0 می شود و موتور شروع به کند شدن می کند. اگر شفت سروو در موقعیتی قرار گیرد که با سیگنال ورودی که Super را کنترل می کند، این اتفاق می افتد.
بیایید همه چیز را در چشم انداز قرار دهیم. شفت سروو درایو به صورت مکانیکی به دسته پتانسیومتر متصل می شود. همزمان با چرخش درایو سروو، پتانسیومتر می چرخد، در نتیجه بلبرینگ آن تغییر می کند و ولتاژ خروجی Urev. ظاهراً ولتاژ خروجی از پتانسیومتر مستقیماً در نقطه ای است که درایو سروو می چرخد. در همان زمان، سیگنال سروو درایو ورودی Ucontrol با تعداد پالس های سه گانه 0.001 تا 0.002 ثانیه، سطح Ucontrol ولتاژ را تنظیم می کند، که نشان می دهد شفت درایو سروو چقدر باید بچرخد. بازوی موتور الکتریکی در لحظه ای که خود شفت درایو سروو در موقعیت لازم قرار دارد به بازوی سیگنال Uobraz می رسد. و بوستر مرحله شماره 3 لازم است تا ولتاژ قوی به موتور الکتریکی وارد شود و موتور در سریعترین زمان ممکن شفت را به سمت سروو درایو در موقعیت مشخص شده حرکت دهد.
سروو موتور را اعمال کنید
همانطور که در بالا گفته شد، برای کنترل سروموتور، باید از پارامترهای PWM استفاده کنید. چنین PWM می تواند به روش های مختلفی تولید شود. بیایید به آنها نشان دهیم که چه کار می کنند.
1. کنترل سروموتور با استفاده از تایمر 555 اضافی . تراشه تایمر 555 را می توان در حالت مولد پالس کار کرد (برای گزارش در مورد این تراشه، مقاله همراه را بخوانید). سپس می توان چنین پارامترهایی را برای عملکرد این ریزمدارها انتخاب کرد تا تکانه های مورد نیاز ما ایجاد شود. با تغییر سرعت این پالس ها، یعنی با تغییر سرعت پالس ها از 0.001 به 0.002 ثانیه، سرعت چرخش شفت درایو سروو را تنظیم می کنیم.
برای پیاده سازی سیگنال PWM، لازم است مداری با فاصله پالس تنظیم شده در فرکانس ثابت 50 هرتز ایجاد شود. پارامترهای اجزای موجود در نمودار (شکل 6) به گونه ای انتخاب می شوند که ایمنی را تضمین کنند. اگر قرار است سیگنال کروبان همه ذهن ها را راضی کند، باید معکوس شود. ترانزیستور در مدار کاملا ضروری است. برای تعیین دما در محدوده های مشخص شده، به یک پتانسیومتر با حداکثر پشتیبانی 20 کیلو اهم نیاز دارید. ما از دو پتانسیومتر 10 کیلو اهم استفاده خواهیم کرد (این پتانسیومترها در مجموعه اصلی Evolvector سطح 1 استفاده می شوند، این مدار به طور کامل توضیح داده شده است. سرعت عملکرد سروموتور روی 180 درجه تنظیم شده است. دسته ها یک پتانسیومتر هستند. درایو سروو درجه می چرخد و برای بسته بندی اضافی دیگری - در 90 درجه دیگر.

مالیونوک 6
بهتر است این نمودار را بخوانید و می توانید با خرید Basic Set of the 1st Level Evolvector آن را انتخاب کنید.
2. کنترل سروموتور با کمک کنترلر. ز همچنین امکان تولید سیگنال PWM مورد نیاز با کمک یک کنترلر اضافی وجود دارد. برای مثال می توانید کنترلر را روی پلتفرم آردوینو برنامه ریزی کنید. برای ساده سازی برنامه نویسی الگوریتم کنترل سروموتور (تولید PWM) تا حد امکان، شروع به نوشتن برنامه هایی به نام کتابخانه کنید. کد برنامه تاشو ما که از خبرنگار دریافت میشود، با استفاده از توابع مورد نیاز ما با استفاده از دستورات کوتاه هنگام اتصال کتابخانه به برنامه اصلی ترجمه میشود. از دیدگاه الگوریتمی، کنترل دستگاه هایی مانند سروو موتورها بسیار ساده و دستی است.
نمودار اتصال، و همچنینیک طرح (برنامه) برای کنترلر سروموتور آردوینو عدد 7 را نشان می دهد.
مالیونوک 7
اخطار: اتصال سروموتور به صفحه در وسط است، مانند لبه (شکل 7)، لازم نیست. برای تعداد کم اتصالات خود، یک سروموتور در دسته «منهای» داریم که حتی جریان های کوچکی را که به طور منظم از طریق آنها کار می کنیم، کنترل می کند و مستقیماً روی برد تغذیه می کند. یک سرو درایو با اندازه استاندارد به نیروی بیشتری نیاز دارد که می تواند باعث داغ شدن بیش از حد و آسیب به کنترلر شود. اتصالات به عمر موتورها فقط باید از طریق یک سری درایو ترن انجام شود، به خصوص زمانی که نیرو به طور همزمان به سرووها منتقل می شود.
#عبارتند از<Servo.h>- این دستور به معنای اتصال کتابخانه برای کنترل سروو درایو است. این کتابخانه روی دیسک Evolvector قرار دارد که همراه با مجموعههای سطوح دیگر ما عرضه میشود. همچنین می توانید آنها را در اینترنت پیدا کنید و در پوشه "کتابخانه ها" آردوینو IDE خود قرار دهید.
کتابخانه متصل حاوی تعداد زیادی دستور است، ما فقط به آنهایی که در برنامه استفاده می شوند نگاه خواهیم کرد.
سروو دیویگ; - این یک تغییر از نوع خاص است. dvig- این قابل تغییر است (نام به اندازه کافی انتخاب شده است). سروو- این نوع تغییر (نوع خاصی که در کتابخانه به دست آمده مشخص شده است). شما می توانید تا 12 نوع قابل تغییر را برای کنترل 12 سروو نصب کنید. یعنی با این دستور به برد اطلاع دادیم که یک سروو درایو داریم که تماس گرفتیم dvig.
dvig.attach(9);- این دستور به این معنی است که درایو سروو ( dvig) تا 9 پینو (visnovku) اضافه کنید.
dvig.write (90); - این دستور درایو سروو را تغییر می دهد ( dvig) به حالت وسط (90 درجه) بچرخانید.
dvig.write(0); - درایو سروو را در موقعیت 0 درجه می چرخاند.
dvig.write (180); - درایو سروو را در موقعیت 180 درجه می چرخاند.
می توانید در صفحات وب سایت ما معنی ردیف های برنامه را دریابید یا از کارمندان اصلی نحوه ورود به انبار را بیابید.
این مقاله درایوهای سروو را پوشش میدهد: دستگاهها، عملکردها، اتصالات درایو سروو، اتصالات درایو سروو، انواع درایوهای سروو و تراز آنها. بیایید شروع کنیم و بفهمیم که سروو درایو چیست.
درایو سروو را درک کنید
درایو سروو اغلب به عنوان مکانیزمی با یک موتور الکتریکی شناخته می شود که می توان از آن خواست تا در جهت خاصی بچرخد و در آن موقعیت تنظیم شود. با این حال، این کاملاً خارج از معنا نیست.
به صراحت، سروو درایو از طریق یک اتصال کنترل منفی هدایت می شود که به شما امکان می دهد پارامترهای فرمان را به طور دقیق کنترل کنید. سروو درایو نوعی درایو مکانیکی است که شامل یک سنسور (موقعیت، سیالیت، نیرو و غیره) در انبار و یک واحد کنترل درایو است که به طور خودکار پارامترهای لازم را بر روی سنسور و دستگاه مطابق با تنظیمات خارجی تنظیم می کند. .
به عبارت دیگر:
سروو درایو مقدار پارامتری را که کنترل می کند به عنوان ورودی دریافت می کند. به عنوان مثال، در گوشه و کنار
واحد گرمایش برابر با مقادیر روی سنسور آن است
بر اساس نتیجه تنظیم، عمل انجام می شود، به عنوان مثال: چرخش، شتاب یا افزایش به طوری که مقدار سنسور داخلی به مقدار پارامتر خارجی که کنترل می کند نزدیکتر شود.
سرووها بسیار گسترده هستند که باعث کاهش تعداد کارها و سرووها می شود که سرعت بسته بندی مشخص شده را حفظ می کنند.
یک درایو معمولی هوبی سروو در زیر نشان داده شده است.
سرووها چگونه کنترل می شوند؟
اتصال به درایو سروو
درایوهای سروو دارای دسته ای از قطعات ذخیره سازی هستند.

درایو – موتور الکتریکی با گیربکس. برای تبدیل برق به چرخش مکانیکی که لازم است موتور الکتریکی. با این حال، اغلب سیال بودن موتور برای یک موتور عملی بسیار زیاد است. برای کاهش نقدینگی از vikoryst استفاده کنید گیربکس: مکانیزمی با چرخ دنده که گشتاور را منتقل و تبدیل می کند.
با روشن کردن موتور الکتریکی، می توانید شفت خروجی را بپیچید - چرخ دنده انتهایی درایو سروو که می توانید هر آنچه را که می خواهید به آن وصل کنید. محافظت کنید تا موقعیت توسط دستگاه کنترل شود ضروری است سنسور چراغ راهنما - رمزگذار، که در سیگنال الکتریکی به عقب برمی گردد. برای این منظور اغلب از پتانسیومتر استفاده می شود. هنگام چرخاندن لغزنده پتانسیومتر، تکیه گاه متناسب با چرخش تغییر می کند. به این ترتیب با این کمک اضافی می توانید یک آسیاب نخ زنی برای مکانیزم نصب کنید.
یک پر کردن الکترونیکی بین موتور الکتریکی، گیربکس و پتانسیومتر در سروو درایو وجود دارد که نشان دهنده دریافت پارامتر جدید، مقدار خوانده شده از پتانسیومتر، تراز آنها و روشن/خاموش شدن موتور است. وان مسئول حمایت از شرایط منفی است.
برای رسیدن به سروو سه دارت لازم است. دو مورد از آنها عمر موتور را نشان می دهد، سومی سیگنالی را ارائه می دهد که کنترل می کند که برای تنظیم موقعیت دستگاه استفاده می شود.
حال بیایید نحوه کنترل درایو سروو را ببینیم.
کنترل درایو سروو رابط سیگنال های سرامیکی
برای اینکه به درایو سروو موقعیت خود را بگویید، باید سیگنالی برای چه منظوری ارسال کنید. سیگنال پخت - پالس های فرکانس ثابت و عرض متغیر.

آنهایی که در آنها ممکن است درایو سروو را اشغال کنند باید در حضور حداکثر دو پالس باقی بمانند. هنگامی که سیگنالی به مداری که آن را کنترل می کند می رسد، مولد پالس واقع در آن، پالس خود را به لرزه در می آورد که شدت آن از طریق یک پتانسیومتر نشان داده می شود. قسمت دیگر مدار برابر با شدت دو پالس است. به محض ایجاد آسیب، موتور الکتریکی شروع به کار می کند. به طور مستقیم، بسته بندی نشان می دهد که کدام یک از پالس ها کوتاه است. به محض قوی تر شدن پالس ها، موتور الکتریکی شروع به کند شدن می کند.
اغلب، در سرورهای سرگرمی، پالس ها با فرکانس 50 هرتز می لرزند. این بدان معناست که پالس هر 20 میلی ثانیه یک بار ارسال و دریافت می شود. اگر پالس ضربه ای 1520 میکرو ثانیه باشد، به این معنی است که درایو سروو مجبور به اشغال موقعیت وسط است. افزایش یا تغییر در پالس باعث می شود که درایو سروو در پشت فلش یا در برابر فلش به روشی مشابه بچرخد. در این حالت، یک مرز بالا و پایین بین ضربه وجود دارد. کتابخانه Servo برای آردوینو مقادیر زیر را برای پالس ضربه دارد: 544 µs - برای 0 درجه و 2400 µs - برای 180 درجه.
لطفاً توجه داشته باشید که در دستگاه خاص شما، ممکن است به نظر برسد که تنظیمات کارخانه از تنظیمات استاندارد نادیده گرفته شده است. درایوهای سروو پهنای پالس 760 میکرو ثانیه را ارائه می دهند. موقعیت میانی 760 میکرو ثانیه است، مانند سرووهای معمولی موقعیت میانی 1520 میکرو ثانیه است.
همچنین به این معنی است که آن چیزی بیش از صرفاً قبلاً گرفته شده است. با این حال، در همان مدل، درایو سروو ممکن است نقص داشته باشد، که در هنگام لرزش مجاز است، که منجر به این واقعیت می شود که محدوده عملیاتی پالس ها کمی کاهش می یابد. برای عملکرد دقیق پوست، می توان یک سروو درایو خاص را کالیبره کرد: از طریق آزمایش، باید مشخصه برد صحیح آن را انتخاب کرد.
اگر واقعاً می خواهید احترام خود را از دست بدهید، در اصطلاح ارزش آن را دارد. اغلب روش کنترل سرووها PWM/PWM (مدولاسیون عرض پالس) یا PPM (مدولاسیون موقعیت پالس) نامیده می شود. اینطور نیست و استفاده از این روش ها می تواند به درایو آسیب برساند. اصطلاح صحیح PDM (Pulse Duration Modulation) است. برای برخی، مدت زمان تکانه ها مهم است و دفعات وقوع آنها چندان مهم نیست. 50 هرتز معمول نیست، اما سروو درایو در هر دو فرکانس 40 و 60 هرتز به درستی کار می کند. تنها چیزی که برای هر مادری لازم است این است که با تغییر شدید فرکانس رگ ها می توانند تکان دادن و با کاهش تنش انجام دهند و با فرکانس قوی (مثلا 100 هرتز) بیش از حد گرم شده و ترک کنند. باشه.
ویژگی های درایوهای سروو
حالا بیایید بفهمیم سرووها چیست و چه ویژگی هایی دارند.
گشتاور و سرعت چرخش
بیایید اکنون در مورد دو ویژگی بسیار مهم درایو سروو صحبت کنیم: گشتاورو در مورد سرعت چرخش.
لحظه نیرو یا لحظه چرخش، یک کمیت فیزیکی برداری است، که بهطور سنتی بردار شعاع کشیده شده از محور چرخش به نقطه نیروی گزارششده، به بردار نیرو است. عملکرد بیرونی نیرو بر روی جسم جامد را مشخص می کند.

به عبارت ساده تر، این مشخصه نشان می دهد که چقدر مهم است که یک سروو درایو در یک روز معین آرام بماند. از آنجایی که گشتاور چرخش سرو درایو بیش از 5 کیلوگرم در سانتی متر است، به این معنی است که سروو درایو تا 1 سانتی متر به صورت افقی روی گلدان فشار داده می شود و 5 کیلوگرم در انتهای دیگر آویزان می شود. یا به طور معادل، اضافه کردن 5 سانتی متر به 1 کیلوگرم مهم است.
سرعت سروو درایو در فاصله ساعتی که طول می کشد تا درایو سروو 60 درجه بچرخد متفاوت است. مشخصه 0.1 ثانیه / 60 درجه به این معنی است که سروو در 0.1 ثانیه 60 درجه می چرخد. محاسبه سرعت یک مقدار بزرگتر، دور در دقیقه دشوار است، اما اتفاق افتاده است که هنگام توصیف سرووها، بیشتر از این واحد استفاده می شود.
لطفاً توجه داشته باشید که گاهی اوقات باید بین این دو ویژگی مصالحه کنید، زیرا اگر میخواهید یک درایو سروو قابل اعتماد که بتواند قدرت زیادی را ببیند، باید آماده باشیم تا نصب به طور کامل بچرخد. و اگر درایو بسیار قوی بخواهیم، حذف آن از موقعیت برابری بسیار آسان خواهد بود. هنگامی که همان موتور در حال چرخش است، تعادل با پیکربندی چرخ دنده ها در جعبه دنده تعیین می شود.
البته اکنون می توانیم از دستگاهی استفاده کنیم که درد و سردرد زیادی تولید می کند تا ویژگی های آن نیازها را برآورده کند.
فاکتور فرم
درایوهای سروو از نظر اندازه متفاوت هستند. و اگرچه هیچ طبقهبندی رسمی وجود ندارد، تولیدکنندگان مدتهاست در تلاش بودهاند تا از تغییر شکل رایج عناصر چفت و بست تعیین کنند که چند اندازه وجود دارد. آنها را می توان به موارد زیر تقسیم کرد:
کم اهمیت
استاندارد
بوی تعفن با این ابعاد مشخص ظاهر می شود:
سرووهای "نوع ویژه" نیز نامیده می شوند که ابعادی دارند که واجد شرایط این طبقه بندی نیستند، اگرچه تعداد این سرووها بسیار کم است.
رابط داخلی
درایوهای سروو یا آنالوگ یا دیجیتال هستند. پس نقاط قوت، مزایا و معایب آنها چیست؟
صداها تحت تأثیر هیچ چیز قرار نمی گیرند: موتورهای الکتریکی، گیربکس ها و پتانسیومترها یکسان هستند، آنها فقط تحت تأثیر الکترونیک سرامیکی داخلی قرار می گیرند. به جای یک ریز مدار مخصوص برای درایو سروو آنالوگ در یک دوقلو دیجیتال، می توانید یک ریزپردازنده روی برد نصب کنید که پالس ها را دریافت می کند، آنها را تجزیه و تحلیل می کند و موتور را کنترل می کند. بنابراین، یک فرد فیزیکی قدرت کمتری در نحوه پردازش و پردازش تکانه ها توسط موتور دارد.

متأسفانه سروو درایو هنوز هم تکانه هایی را که کنترل می کند دریافت می کند. پس از این، سروو درایو آنالوگ تصمیم به تغییر موقعیت می گیرد و در صورت نیاز سیگنالی را به موتور ارسال می کند. با فرکانس 50 هرتز صدا می دهد. به این ترتیب ما 20 میلی ثانیه - حداقل ساعت واکنش را تنظیم می کنیم. در این زمان ممکن است لازم باشد موقعیت درایو سروو را تغییر دهید. اما فقط یک مشکل وجود دارد. هنگامی که موتور الکتریکی در حالت استراحت است، هیچ ولتاژی تامین نمی شود؛ زمانی که فشار کمی به موتور الکتریکی وارد می شود، سیگنال کوتاهی از ولتاژ پایین به موتور الکتریکی ارسال می شود. هر چه الهام بیشتر باشد، سیگنال قوی تر است. به این ترتیب، با ورودی های کوچک، سروو درایو نمی تواند به سرعت موتور را بچرخاند یا گشتاور بالایی ایجاد کند. "مناطق مرده" در طول یک ساعت ناپدید می شوند.
این مشکل می تواند ناشی از افزایش فرکانس دریافت، پردازش سیگنال و عملکرد موتور الکتریکی باشد. درایوهای سروو دیجیتال از یک پردازنده ویژه استفاده می کنند که پالس های کنترلی را دریافت می کند، آنها را پردازش می کند و سیگنال هایی را با فرکانس 200 هرتز یا بیشتر به موتور ارسال می کند. به نظر می رسد که درایو سروو دیجیتال بهتر می تواند به ورودی های خارجی واکنش نشان دهد، که به ما امکان می دهد سرعت و گشتاور لازم را برای چرخش ایجاد کنیم و بنابراین موقعیت داده شده را بهتر حفظ کنیم، که خوب است. البته در این حالت برق بیشتری مصرف می شود. همچنین سرووهای دیجیتال در ساخت تاشو هستند و بنابراین هزینه بسیار بیشتری دارند. خوب، فقط دو کاستی - تمام معایبی که سرووهای دیجیتال دارند. از نقطه نظر فنی، سرووهای آنالوگ به راحتی می توانند غرق شوند.
مواد دنده
چرخ دنده های سروو از مواد مختلفی ساخته می شوند: پلاستیک، کربن، فلز. همه آنها به طور گسترده ای متفاوت هستند، بسته به وظیفه خاص و ویژگی های مورد نیاز در نصب.

دندههای پلاستیکی، اغلب نایلونی، بسیار سبک هستند، مستعد سایش نیستند و در سرووها پهنتر هستند. بوها روی مناظر بزرگ تاثیر نمی گذارد، اما از آنجایی که مزیت ها به نقاط کوچک منتقل می شود، دنده های نایلونی بهترین انتخاب هستند.
دنده های کربنی در مقایسه با دنده های نایلونی دوام بیشتری دارند و عملا فرسوده نمی شوند. کمبود اصلی جاده است.
چرخ دنده های فلزی مهمترین آنها هستند که از بوی بد محافظت می کنند و حداکثر توجه را تضمین می کنند. اگر به اندازه کافی خسته شدید، تقریباً هر فصل باید دنده ها را عوض کنید. چرخ دنده های تیتانیومی در بین چرخ دنده های فلزی هم از نظر مشخصات فنی و هم از نظر قیمت مورد علاقه هستند. متأسفانه بوی تعفن برای شما گران تمام می شود.
موتورهای کلکتور و براشلس
سه نوع سروو موتور وجود دارد: موتور پایه با هسته، موتور بدون هسته و موتور بدون جاروبک.

موتور اولیه با هسته (راست دست) دارای روتور کشویی قوی با سیم پیچی ظریف و آهنربا در اطراف آن است. روتور دارای یک بخش است، بنابراین هنگامی که موتور می چرخد، روتور با عبور بخش از آهنربا نوسان کوچکی از موتور را به لرزه در می آورد و در نتیجه یک سروو درایو خارج می شود که لرزش دارد و دقت کمتری دارد. درایو سروو با موتور بدون هسته. یک موتور با روتور خالی (چپ دست) یک هسته مغناطیسی منفرد را با سیم پیچی به شکل استوانه یا حلقههای دور آهنربا حرکت میدهد. طراحی بدون هسته سبک وزن است و بدون بخش است و در نتیجه عملکرد نرمتر و بدون لرزش دارد. چنین موتورهایی گرانتر هستند، اما سطح کنترل، گشتاور و سرعت بالاتری نسبت به موتورهای استاندارد ارائه می دهند.

درایوهای سروو با موتورهای براشلس اخیراً ظاهر شده اند. مزایا مانند سایر موتورهای براشلس است: بدون برس، به این معنی که به تکیه گاه لفاف آسیب نمی رسانند و فرسوده نمی شوند، سیالیت و گشتاور بیشتر از موتورهای براشلس است. درایوهای سروو با موتور براشلس گرانترین سرووها هستند که عملکرد بهتری نسبت به سرووهای با انواع دیگر موتورها دارند.
اتصالات به آردوینو
بسیاری از سرووها را می توان مستقیماً به آردوینو متصل کرد. قطار سه دارت برای کدام نوع مناسب است:
chervoniy - میخانه؛ به کنتاکت 5 ولت یا مستقیماً به لایف لاین وصل شوید
قهوه ای یا سیاه - خاکی
زرد یا سفید - سیگنال؛ به خروجی دیجیتال آردوینو متصل می شود.
برای اتصال آردوینو، استفاده از یک برد توسعه پورت مانند Troyka Shield آسان خواهد بود. اگر می خواهید با چند سیم اضافی، می توانید سروو را از طریق برد برد یا مستقیماً به کنتاکت های آردوینو وصل کنید.
شما می توانید پالس های لیزر را خودتان تولید کنید، اما با طیف وسیع تری از تنظیمات، کتابخانه استاندارد Servo برای سادگی استفاده می شود.
میخانه Obezhennya
درایو سروو هوبی اولیه در طول کار بیش از 100 میلی آمپر را حفظ می کند. هنگام استفاده از آردوینو، می توانید تا 500 میلی آمپر را ببینید. اگر نیاز به نصب یک درایو سروو محکم در پروژه خود دارید، باید به دیدن آن در مدار از طریق سخت افزار اضافی فکر کنید.
بیایید نگاهی به اتصال لب به لب درایو سروو 12 ولت بیندازیم: 
تعداد سرووهایی که متصل هستند را در نظر بگیرید.
در اکثر بردهای آردوینو، کتابخانه Servo از کنترل بیش از 12 سروو پشتیبانی نمی کند، در آردوینو مگا این عدد به 48 افزایش می یابد. با این حال، یک عارضه جانبی کوچک از کتابخانه وجود دارد: اگر با آردوینو مگا کار نمی کنید، پس استفاده از تابع analogWrite() در 9 و 10 مخاطب، مستقل از اتصال سروو درایو به هر یک از مخاطبین، دشوار می شود. در آردوینو مگا می توانید تا 12 سروو را بدون ایجاد اختلال در عملکرد PWM/PWM وصل کنید؛ اگر تعداد سرووهای زیادی دارید، نمی توانید از analogWrite() در پین های 11 یا 12 استفاده کنید.
عملکرد کتابخانه سروو
کتابخانه Servo به شما امکان می دهد درایوهای سروو را برنامه ریزی کنید. برای این منظور به نوع Servo تغییر دهید. کنترل شامل توابع زیر است:
attach() - تغییری را به یک پین خاص اضافه می کند. دو گزینه نحوی برای این تابع وجود دارد: servo.attach(pin) و servo.attach (pin، min، max). در این حالت، پین تعداد پایهای است که درایو سروو به آن میرسد، min و max حداکثر تعداد پالسها در میکروثانیه مربوط به چرخش 0 درجه و 180 درجه است. برای تمیز کردن، مقادیر برابر با 544 میکرو ثانیه و 2400 میکرو ثانیه به طور مداوم است.
Write() - به درایو سروو دستور می دهد که مقدار پارامتر جدید را بپذیرد. نحو پیشرفته: servo.write (زاویه)، که در آن زاویه جهتی است که سروو می تواند بچرخد.
writeMicroseconds() - فرمانی را برای ارسال پالس دوم به سروو می فرستد که آنالوگ سطح پایین فرمان فوروارد است. نحو پیشرفته: servo.writeMicroseconds(uS)، که در آن uS پالس اضافی در میکروثانیه است.
read() - مقادیر محفظه ای که درایو سروو در آن قرار دارد را با دقت بیشتری می خواند. نحو پیشرفته: servo.read() کل مقدار را از 0 به 180 می چرخاند.
attached() - تأیید اینکه مقدار پیوست شده به یک پین خاص تغییر کرده است. نحو حملات: servo.attached() ، حقیقت منطقی تغییر می کند، اگر تغییر تا حد زیادی خورده شده باشد یا دروغ در آخرین مرحله باشد.
detach() - کار را انجام دهید، عمل attach() را معکوس کنید، به طوری که تغییر از پینی که به آن اختصاص داده شده است انجام شود. جدا کردن نحو: servo.detach().
تمام متدهای موجود در کتابخانه Servo2 بر اساس متدهای Servo هستند.
لب به لب از کتابخانه سروو
جایگزینی
درایوهای سروو انواع مختلفی دارند، برخی بهتر هستند - برخی ارزان تر، برخی قابل اعتمادتر هستند - برخی دقیق تر هستند. و قبل از خرید سروو درایو مطمئن شوید که ویژگی های بهتری دارد تا برای پروژه شما مناسب باشد. در تلاش هایتان موفق باشید!
سروو درایو (درایو برای دوخت)- از طریق یک لینک دروازه منفی که به شما امکان می دهد پارامترهای rukhu را دقیقاً کنترل کنید به keruvannyam بروید.
سروو درایو هر نوع درایو مکانیکی (دستگاه، عنصر عامل) است که شامل یک سنسور (موقعیت، سیالیت و غیره) و یک واحد کنترل درایو (مدار الکترونیکی یا سیستم کشش مکانیکی) است که به طور خودکار پارامترهای لازم را به سنسور تنظیم می کند. (i بله، روی دستگاه) تا مقدار خارجی مشخص شده (موقعیت دستگیره کنترل یا مقدار عددی در سیستم های دیگر).
مطالب از ویکی پدیا - دانشنامه آزاد
سروو درایو یک سیستم درایو است که در طیف گسترده ای از کنترل سیالیت، فرآیندهای پویا و با دقت بالا را تضمین می کند و تکرارپذیری خوب آنها را تضمین می کند. این سیستم برای تولید گشتاور، سیالیت و موقعیت با دقت و دینامیک مشخص طراحی شده است. کلاسیک درایو سرووشامل یک موتور، یک سنسور موقعیت و یک سیستم کنترل است که دارای سه مدار کنترل (موقعیت، سرعت و جریان) است.
واژه سروو شبیه کلمه لاتین «servus» است که به معنای خدمتکار، برده، دستیار است. در اتاقهای ماشین، داشتن درایوهای اضافی (تغذیههای درایو در میز کار، روباتهای درایو و غیره) مهم بود. با این حال، امروز وضعیت تغییر کرده است، اکنون هد درایوها با کمک فناوری سروو پیاده سازی می شوند.
در این ساعت، سرووهااین مشکل وجود دارد، زیرا دقت کافی در تنظیم مبدل های فرکانس صنعتی اولیه وجود ندارد. Zastosuvannya اسید بالا درایوهای سرووبرای نصب بسیار پربازده، که در آن بهره وری معیار اصلی است، ضروری است. درایوهای سروومجهز به سیستم های دقیق برای حفظ سیالیت و موقعیت یابی ربات های صنعتی و ماشین آلات با دقت بالا. سرووهمچنین بر روی نیمکت های حفاری جیگ، بر روی سیستم های حمل و نقل تکنولوژیکی مختلف، بر روی مکانیزم های کمکی مختلف و غیره نصب می شود. سرووها.
جهانی درایو سروو
جهانی درایو سرووبا مجموعه ای غنی از توابع، توانایی کنترل سروموتورهای انواع مختلف (هم سنکرون و هم ناهمزمان)، توانایی کار با سنسورهای گیت مختلف، و همچنین در دسترس بودن تعدادی گزینه و گسترش مشخص می شود. به ظاهر جهانی درایو سروودر KEB F5-Multi (Nimechchina) و Control Techniques Unidrive SP. (انگلستان)
درایو سرووبر اساس KEB F5-Multi
درایو سرو KEV" align="RIGHT" width="20%" border="0">کنترل کننده درایو الکتریکی با مدار دروازه برای موتورهای سنکرون و ناهمزمان. به ویژه برای عملکرد در یک حلقه بسته، انواع احتمالی اتصال حلقه طراحی شده است:
حل کننده
رمزگذار
سنسور موقعیت Sin-Cos
سنسور موقعیت مطلق
EnDat، Hiperface یا tachogenerator
ویژگی ها و ویژگی های اصلی:
طیف گسترده ای از فشارها
ولتاژ 220 یا 380 ولت
می توان با یک جریان ثابت زندگی کرد
موتور کروانیا بدون سنسور
ورودی/خروجی های آنالوگ و دیجیتال ایزوله گالوانیکی
رله ها و خروجی های برنامه ریزی شده ترانزیستوری
بدیهی است که می توان مفهوم گرمایش غیرمتمرکز را با یک سیستم درایو پیاده سازی کرد:
تنظیم سرعت و گشتاور
کنترل موقعیت
حالت های بسته بندی باریک
ریمیکس بادامک
دیسک بادامک الکترونیکی
موقعیت یابی تک محوری
موقعیت میز دوار
همه درایوها از آخرین رابط های Profibus، CAN، Sercos، InterBus، DeviceNet، Modbus، Ethernet، Ethercat، Powerlink، Profinet و KEB-HSP5/DIN 66019-II پشتیبانی می کنند.
ویکوناوچی و خاص درایو سروو
سروو درایو نهایی تحت کنترل کنترلر کار می کند و امکان انتخاب عملکردها و تنظیماتی که برای ربات ساده است را فراهم می کند. بنابراین سروو درایو نهایی اقتصادی تر است. بیایید نگاهی به Vikonau بیندازیم سروودر لب به لب سنکرون درایوهای سروومکاپیون.
درایو سروو Mecapion

همزمان سروو Mecapion (مثلا مترونیکس) یک محصول اساسی برای راه حل های سیستمی در اتوماسیون صنعتی است که مدت هاست برای کارگران روسی شناخته شده است.
ویژگی های اصلی درایوهای سروومترونیکس
محدوده فشار از 0.03 تا 11 کیلو وات
ادغام یک کیت بازیابی، که به شما امکان می دهد انرژی را به اطراف بچرخانید، و یک کلید برای تخلیه انرژی در طول گالوانیزه دینامیکی
حالت تست تنظیم فرکانس رباتیک
عملکردهای کاهش لرزش هنگام روشن شدن موتور و هاب آن به شما این امکان را می دهد که ربات را با تغییر فرکانس در حالت کولیوال هم در هنگام راه اندازی و هم در حین کار روشن کنید.
امکان استفاده از سنسورهای موقعیت افزایشی مطلق و مطلق
حالت سیستم کنترل ربات - کنترل سرعت یا گشتاور را انتخاب کنید
سرسختی بسته موی صورتی فراموشی برنامهریزی شده به راحتی توسط همان مار -در -فرکانس جستجوی Virishuvati روی پایه یوگوی تکیچینیل (از جمله درایوهای puppaysovynnya) مجاز است.
وجود موتورهای با شفت خالی در خط تولید مترونیکس به شما این امکان را می دهد که دستگاه میانی - کوپلینگ مناسب - را با استفاده از نمودارهای سینماتیک روشن کنید.
خروجیهای برنامهریزیشده به سیستمها اجازه میدهند تا در مواقع اضطراری مختلف با سطح حفاظتی بالا و با حداکثر محتوای اطلاعاتی برای اپراتور کار کنند.
سری VS یک جرقه زن استاندارد است که کنترل سرعت، گشتاور (± 10 ولت) و موقعیت (گام / مسیر) را اجرا می کند.
تبدیل فرکانس های سری VS را می توان در حالت های زیر استفاده کرد:
تغییر موقعیت با استفاده از یک کنترل کننده خارجی، که توالی پالس ها را تنظیم می کند.
عملکرد با سرعت بالا را بر روی ورودی آنالوگ یا ورودی های گسسته ارائه می دهد.
کنترل گشتاور ورودی آنالوگ در حالت تبادل حداکثر گشتاور.
Keruvannya swidkіst/position.
keruvannya با سرعت / لحظه.
موقعیت/لحظه keruvannya.
سری ویژه VP برای کارهای ویژه در نظر گرفته شده است:
موقعیتیابی مختصات خطی با انتخاب حداکثر 64 موقعیت، شش ورودی گسسته (VP1)، دامنه معمولی کاربرد - تضمین حرکت خطی در سیستمهایی با انتقال بر روی یک بال اسکرو
موقعیت یابی فعلی با قابلیت انتخاب تا 32 موقعیت، پنج ورودی گسسته (VP2)، مناطق معمولی ذخیره سازی - میزهای چرخشی، خطوط نوار نقاله دوار، دستگاه های تعویض خودکار ابزار و غیره.
موقعیت یابی با تغذیه متغیر (VP3)، منطقه کاربردی معمولی - ماشین آلات بسته بندی، انواع دستگاه هایی که هم با سیگنال از رمزگذار روی شفت موتور و هم با علامت سنسور گسسته خارجی موقعیت یابی می شوند.
موقعیت یابی قابل برنامه ریزی با قابلیت انتخاب حداکثر 8 برنامه با سه ورودی گسسته (VP5) که هر برنامه می تواند تا 100 موقعیت (موقعیت) داشته باشد که در حافظه معکوس فرکانس ذخیره می شود.
برای پیوند تبدیل فرکانس ها VS و یک کامپیوتر شخصی (صنعتی)، از یک پورت COM استفاده می شود؛ در صورت لزوم، از طریق مبدل RS232/RS485، فرکانس های تبدیل را می توان ترکیب کرد.
ادغام ها درایو سروو
align="RIGHT" width="30%" border="0">برنج سبزی اصلی، و همچنین مهمترین محصول، یکپارچه شده است درایو سروو- موتور، کنترلر، سنسور دروازه و تغییر فرکانس در یک محفظه واحد. با کاهش عملیات نصب به حداقل، اتصال و راه اندازی را ساده می کند، زمان صرف شده برای کار را سرعت می بخشد، به طور قابل توجهی در فضا صرفه جویی می کند و همچنین تأثیر مثبتی بر بهره وری خواهد داشت. درایو سروو.
در بازار روسیه آنها قبلاً موفق شده اند خود را با مهربانی نشان دهند و ادغام داخلی فدراسیون روسیه را توصیه کنند. سروو SPS.
کنترل بی زمان (بردار) بر اساس یک الگوریتم سازگار برای موتورهای زمان
عملکرد دینامیکی بالا برای سرعت جریان مدارهای بسته برای تنظیم جریان در سیم پیچ موتور
ویکوریستانا از حلقه های بسته سیالیت
لرزش کم برای قاب زوسیلا که به صورت دینامیکی تنظیم می شود
طراحی فکر شده و نصب آسان
اندازه جمع و جور و وزن کوچک
حالت های ربات درایو سروو SPS
پویا - سیگنال از کنترل کننده سطح بالا از طریق یک رابط دیجیتال در زمان واقعی منتقل می شود. حالت دینامیک در سیستم هایی استفاده می شود که نیاز به تراز کانتور دارند (به عنوان مثال، دستکاری کننده ها با کینماتیک تاشو و جداول مختصات برای موقعیت یابی دقیق).
آنالوگ - کنترل با سیگنال پر سرعت ± 10 ولت. این حالت به شما امکان می دهد از درایو برای ارتقاء کنترل با سیستم های کنترل آنالوگ یا کنترل دستی آن (مثلاً در پشت فرمان اضافی) استفاده کنید.
چرخه ای - عملیات چرخه ای برنامه ریزی شده توسط کنترل کننده سطح بالا و صرفه جویی در حافظه درایو را نمایش می دهد. اغلب این به شما امکان می دهد کنترل کننده خارجی سطح بالایی سیستم کنترل را خاموش کنید. حالت چرخه ای، به عنوان مثال، در نوار نقاله ها و در عملیات انبارداری نامناسب استفاده می شود.
Marzed - این حالت به سیستم اجازه می دهد تا بر اساس رابط دیجیتال CAN به بخش های مختلف سیستم سروو تقسیم شود تا حرکات همزمان یا متوالی چندین محور را پیاده سازی کند. در این مورد، همچنین می توان از حالت "master-slave" استفاده کرد که در آن درایو در موقعیت تکرار شفت محرک عمل می کند.
در طراحی های تجهیزات روزانه که بر اساس فناوری های پیشرفته ایجاد می شوند، فرآیندهای خودکار مختلف به تدریج در حال توسعه و تکمیل هستند. از جمله آنها یک سرو درایو با عرض گسترده است که با استفاده از روش تعامل با عناصر مجاور و قطعات درایوهای پویا ثابت نصب می شود. این دستگاه ها کنترل دائمی بر روی زوایای چرخش شفت را تضمین می کنند و سیالیت لازم دستگاه های نوع الکترومکانیکی را ایجاد می کنند.
قسمت ذخیره سازی این سیستم ها سروموتورها هستند که امکان حرکت سیالات را در محدوده مورد نیاز در زمان های خاص فراهم می کنند. بنابراین، تمام فرآیندها و فرآیندها را می توان به صورت دوره ای تکرار کرد و فرکانس این تکرارها در سیستم کنترل تعیین می شود.
اتصال به درایو سروو
قطعات اصلی که یک سروموتور معمولی را تشکیل می دهند روتور و استاتور هستند. برای سوئیچینگ، اجزای ویژه ای به شکل شاخه ها و جعبه های ترمینال نصب می شوند. مدیریت، کنترل و تصحیح فرآیندها با کمک یک گره هسته نزدیک صورت می گیرد. برای تقویت و مرطوب کردن درایو سروو، سیستم ویکوریزه می شود. تمامی قطعات در محفظه قرار دارند.
تقریباً همه سرووها دارای سنسوری هستند که پارامترهای مهمی مانند موقعیت، قدرت یا سرعت سیم پیچ را پردازش و نظارت می کند. واحد گرمایش اضافی از حالت خودکار پارامترهای لازم هنگام کار با دستگاه پشتیبانی می کند. انتخاب یک یا پارامتر دیگر بسته به سیگنال هایی که از سنسور در فاصله زمانی یک ساعت می آید انتخاب می شود.
تفاوت بین درایو سروو و موتور الکتریکی اولیه بستگی به توانایی نصب شفت در یک موقعیت دقیقا مشخص دارد که بر حسب درجه اندازه گیری می شود. موقعیت تنظیم شده و همچنین سایر پارامترها توسط واحد کنترل پشتیبانی می شود.
اصل کار آنها بر اساس تبدیل انرژی الکتریکی به انرژی مکانیکی با استفاده از یک موتور الکتریکی اضافی است. به عنوان درایو، از یک جعبه دنده استفاده می شود که اجازه می دهد سیالیت سیم پیچ به مقدار مورد نیاز کاهش یابد. شفت با چرخ دنده وارد انبار شده و گشتاور را منتقل می کند.
سروو درایو چگونه کار می کند؟
بسته بندی محور خروجی گیربکس که توسط چرخ دنده ها به درایو سروو متصل شده است، وظیفه راه اندازی موتور الکتریکی را بر عهده دارد. گیربکس خود نیاز به تنظیم تعداد روکش ها دارد. شفت خروجی ممکن است به مکانیسم ها و دستگاه هایی که نیاز به تعمیر دارند متصل شود. موقعیت شفت توسط یک سنسور خاموش کننده اضافی کنترل می شود که برای تبدیل سیگنال های الکتریکی در اطراف پیچ طراحی شده است و بر اساس آن اصل عملکرد هر دستگاه تعیین می شود.

این سنسور ولتاژ را رمزگذار یا پتانسیومتر نیز می نامند. وقتی لغزنده را بچرخانید، پشتیبانی آن تغییر می کند. با چرخش رمزگذار، ساپورت را طوری تغییر دهید که در یک موقعیت متناسب باشد. این اصل عملکرد به شما امکان می دهد مکانیسم ها را در موقعیت مورد نظر نصب و تعمیر کنید.
علاوه بر این، سروموتور حاوی یک برد الکترونیکی است که سیگنال های خارجی را به شکل یک پتانسیومتر تولید می کند. در مرحله بعد، پارامترها تنظیم می شوند که نتایج آن با شروع موتور الکتریکی دنبال می شود. همچنین استفاده از پرداخت الکترونیک جریمه منفی دارد.

شما می توانید سروو موتور را با استفاده از سه هادی اضافی متصل کنید. دو مورد از آنها عمر موتور الکتریکی را تامین می کنند و سومی برای انتقال سیگنال های کنترلی برای هدایت شفت به موقعیت مورد نظر استفاده می شود.
با کمک شتاب صاف یا یک گالوانیزه به همان اندازه، می توان از فشار دینامیکی ماوراء طبیعی روی موتور الکتریکی جلوگیری کرد. به همین دلیل است که از میکروکنترلرهای تاشو برای اطمینان از کنترل دقیق تر و کنترل موقعیت عنصر کار استفاده می شود. به عنوان مثال، می توانید هارد دیسک کامپیوتر را نشان دهید، جایی که هدها با استفاده از یک درایو دقیق اضافی در موقعیت مورد نیاز نصب می شوند.
کنترل سروموتور
دلیل اصلی کارکرد نرمال سروموتور در عملکرد کامل آن با سیستم به اصطلاح G-code نهفته است. این کدها مجموعه ای از دستورات و تنظیمات کنترلی برای یک برنامه خاص هستند.
اگر CNC را به عنوان یک کنترل عددی در نظر بگیریم، در این حالت سرووها با آن تعامل دارند. لازم است مقادیر ولتاژ سیم پیچ زنگ هشدار یا آرمیچر موتور الکتریکی را به سطح ولتاژ ورودی تغییر دهید.

کنترل مستقیم سروموتور و سیستم از یک مکان - واحد کنترل کار می کند. هنگامی که فرمانی برای حرکت مسیر در امتداد محور مختصات X صادر می شود، ولتاژی از مقدار مسیر در سوئیچ دیجیتال آنالوگ ظاهر می شود که برای تامین درایو با آن مختصات لازم است. سروموتور با روتور بیرونی پیچ در حال اجرا شروع می شود که به رمزگذار و دستگیره مکانیسم اصلی متصل است.
پالس ها به داخل رمزگذار ارتعاش می کنند که توسط بلوکی که درایو سروو را کنترل می کند پشتیبانی می شود. این برنامه حاوی سیگنال های مختلفی از رمزگذار نصب شده در ایستگاه است که می تواند از مکانیسم نهایی عبور کند. در ساعت مورد نیاز، مبدل آنالوگ با رد قدرت پالس تنظیم شده، ولتاژ خروجی را می پذیرد که در نتیجه سروموتور فشرده می شود. بنابراین، درست تحت هجوم پالس ها، ولتاژ تجدید می شود و عملکرد کل سیستم تجدید می شود.
مشخصات را ببینید
سروو موتورها در گزینه های مختلفی موجود هستند که به آنها امکان استفاده در مناطق مختلف را می دهد. سازه های اصلی به یک کلکتور تقسیم می شوند و برای بهره برداری به عنوان یک جریان دائمی و متغیر طراحی شده اند.
علاوه بر این، سروموتور می تواند سنکرون یا ناهمزمان باشد. دستگاه های سنکرون می توانند سرعت سیم پیچی با دقت بالا و همچنین سرعت چرخش و شتاب را تنظیم کنند. این درایوها به سرعت سرعت اسمی لفاف را افزایش می دهند. درایوهای سرو در یک مدار ناهمزمان با تغییر پارامترهای مدار هنگامی که فرکانس آن توسط یک اینورتر اضافی تغییر می کند کنترل می شوند. آنها با دقت بالا سیالیت مشخص شده باد را برای پایین ترین لفاف ها شیشه ای می کنند.

بسته به نمودار اصلی و طراحی، درایوهای سرو می توانند الکترومکانیکی یا الکتروهیدرومکانیکی باشند. گزینه اول که شامل گیربکس و موتور است سرعت پایینی دارد. در مورد دیگر، عمل حتی قوی تر از پیستون در سیلندر است.
سروو درایو با پارامترهای زیر مشخص می شود:
- لحظه پیچش یا زوسیلا که روی شفت رخ می دهد. به عنوان مهمترین شاخص درایو سروو روباتیک مورد احترام است. برای مقدار ولتاژ پوست، لحظه قدرت برای پیچش استفاده می شود که در پاسپورت ویروس نمایش داده می شود.
- انعطاف پذیری برای چرخش. این پارامتر نشان دهنده دوره زمانی است که لازم است موقعیت شفت خروجی را به 600 تغییر دهید. این مشخصه همچنین به مقدار ولتاژ خاص بستگی دارد.
- حداکثر زاویه چرخشی که شفت خروجی می تواند بچرخد. اغلب این مقدار 180 یا 3600 است.
- تمامی سرووها به دو دسته دیجیتال و آنالوگ تقسیم می شوند. کنترل سروو درایو ارتباط نزدیکی با این موضوع دارد.
- عمر سروو موتورها اکثر مدل ها دارای ولتاژ 4.8 تا 7.2 ولت هستند. زندگی و مدیریت با کمک سه راهنما صورت می گیرد.
- امکان ارتقا به درایو سروو راپ دائمی.
- مواد گیربکس ممکن است متفاوت باشد. چرخ دنده ها از فلز، کربن، پلاستیک یا مواد کامپوزیت ساخته می شوند. هر کدام از آنها موفقیت ها و کاستی های خاص خود را دارند. به عنوان مثال، قطعات پلاستیکی در معرض ضربه ضعیفی قرار می گیرند، اما در برابر سایش در هنگام استفاده منظم مقاوم هستند. با این حال، چرخ دنده های فلزی به سرعت فرسوده می شوند، سپس بو مقاومت بالایی در برابر شدت دینامیکی ایجاد می کند.
مزایا و معایب سروموتورها
این دستگاه ها با توجه به ابعاد یکپارچه خود به راحتی و به سادگی در هر سازه ای نصب می شوند. بوی بی صدا و قابل اعتماد است، پوست از آنها عملا بی صدا عمل می کند، که در هنگام استفاده از آنها در تاشو و قطعات مشابه اهمیت زیادی دارد. با سرعت کم می توانید به حرکات دقیق و نرم دست پیدا کنید. درایو سروو بسته به مشخصات توسط پرسنل قابل تنظیم است.
همانطور که کاستی ها نشان داده شده است، پیچیدگی آهنگ در هنگام تنظیم و تنوع به همان اندازه بالا است.