Servoantrieb – was ist das? Wie kann man einen Servoantrieb mit eigenen Händen herstellen und anschließen? Was macht ein Servomotor und wie funktioniert er? Elektrische Servos.
Das Torgestänge wird über einen Servoantrieb angetrieben oder „in die Bolzen eingeschlagen“
- Amperka-Firmenblog
Hallo an alle Habrakonstrukteure!
Mir kam ein gedankenloser Gedanke in den Sinn: Besorge dir ein Gerät, mit dem man einen Bolzen einschlagen kann. Nur um den Servoantrieb des Roboters zu demonstrieren. Der Algorithmus ist einfach: Wir geben den Befehl, den Hammer anzuheben, prüfen, bis er sich hebt, und lassen den Hammer los; Und so weiter, bis die Blumen geschlachtet sind. Wie können Sie feststellen, ob sich der Hammer bewegt oder ob er verstopft ist, ohne die zusätzlichen Sensoren zu beschädigen? Schalten Sie den „schlechten“ Servoantrieb ein! Wie Sie selbst Geld verdienen können, erfahren Sie in der Statistik.
Was ist ein Servoantrieb? Singular gesagt, Sie wissen alles, aber über jedes Problem: Aus diesem Grund dreht sich der Strom beim Austausch eines stationären Motors bei angelegter Spannung nicht einfach, sondern dreht sich zu einem bestimmten Punkt und bleibt dort stehen. Die Schaltung ist hinter einem zusätzlichen PWM-Signal verbaut. Auch der Servoantrieb des wütenden Lagers ist schuldig, seine Kraft zu kennen. Bevor ich mit dem Maiskolben begann, begann ich zu glauben, dass es einfacher und effizienter wäre, die aktuelle Ernte direkt aus der Kiste zu füttern. Nicht so. Reden wir der Reihe nach über alles.
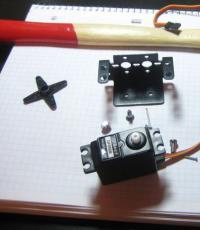
Nun ja, ein Wahrsager-Zubehör: ein Servoantrieb, an dem auf einem kleinen Sockel ein Hammer zum Ausrichten befestigt ist. Der Servoantrieb ist über IO Shield mit Arduino verbunden und der Mikrocontroller konfiguriert den Algorithmus:
- Installieren Sie den Servoantrieb zum Anheben des Hammers
- Handeln Sie nicht, bis der Servoantrieb Ihnen mitteilt, was erreicht wurde
- Schalten Sie den Servoantrieb ein und lassen Sie den Hammer auf die Arme fallen
- Lesen Sie den Text an der richtigen Stelle, was gefallen ist
- Wenn sich der Faden nach mehrmaligem Herunterfallen nicht verändert hat, bedeutet das, dass der Faden nicht mehr verstopft ist. Anscheinend ist der Wein verstopft – das wird vermutet
- Sobald sich alles geändert hat, fangen wir von vorne an

Sägen und Rollen:

Beginnen wir mit dem Schreiben von Firmware für Arduino. Es wird deutlich, dass die Installation eines singenden Kut zum Servieren kein Problem darstellt. Zocrema, mit dem Sie eine Standard-Servobibliothek erstellen können, die aus dem in Grad angegebenen Wert ein Ausgangs-PWM-Signal bildet. Und das Hauptproblem für die Leser ist: Es gibt dafür keine Funktionen.
Nachdem Shvidko das Problem gegoogelt hatte, fand er in den Foren viele Informationen, in denen er maßgebend bestätigte: Das ist unmöglich! Servoantriebe sind schreibgeschützte Geräte.“ Es störte mich nicht, ich hatte intuitiv das Gefühl, dass es einfach möglich war, diese Daten zu erreichen.
Matchasina
Nach einigen aktuellen Witzen am Rande können Sie verstehen, wie der Server die Kontrolle hat. Dabei handelt es sich um den Hauptmotor mit konstantem Durchfluss, der über eine Zahnschiene, die den unteren Gang bildet, mit der Abtriebsspindel verbunden ist. Dieselbe Spindel ist von innen physisch mit dem Potentiometer (Einstellwiderstand) verbunden. Beim Einschalten des Motors dreht sich die Spindel, der Schieber des Potentiometers dreht sich, die Ausgangsspannung des Potentiometers ändert sich, die Spannung des Potentiometers wird abgelesen und die Spannung hat den vorgegebenen Wert erreicht – der Wert ist erreicht, der Motor dreht auf der Identität des Lebens.Anschließend können Sie mit einem Potentiometer den Stromschnitt hinter dem Signal bestimmen. Es war nicht mehr möglich, den Servoantrieb einzuschalten und eine Verbindung zum gewünschten Standort herzustellen. Schauen wir uns Folgendes an:

Ich sage Ihnen gleich, dass mir während des Analysevorgangs der Servoantrieb auf dem Foto unwiderruflich kaputt gegangen ist. Es war nicht nötig, die Platine mit Elektronik zu entfernen, es genügt, die hintere Abdeckung zu entfernen, die mit 4 Schrauben befestigt ist. Es war nicht sofort klar, und um herauszufinden, wo sich das Potentiometer auf der gelöteten Platine befand, mussten wir einen Antrieb opfern.
Achse als Lötpotentiometer an Servos in DFRobot:

Wir benötigen ein Signal vom Schieber, der beim Drehen zwischen minimaler und maximaler Spannung wechselt. Wir nehmen ein Multimeter, drehen die Spindel um und schauen: welche Schaltkreise welches Signal anzeigen. Für meinen Service entspricht eine Spannung von 0,43 einer Drehung um 0° und eine Spannung von 2,56 V entspricht einer maximalen Drehung von 180°.
Löten Sie das neue Signalkabel vorsichtig an.

Wir verbinden es mit dem analogen Eingang A5 am Arduino. Wir schließen den Deckel. Wir schreiben das Programm:
#enthalten
Einschalten, ausprobieren, ausprobieren!
Womit Sie ohne weiteres arbeiten können, es gibt viele Optionen: Sie können einen Controller erstellen, der auf dem basiert, was auf Schiffen zum Einstellen des Schubs (rückwärts/rückwärts) verwendet wird; es ist möglich, das Servo mit der Torverbindung als Element der autonomen Kerma-Steuerung jeder Maschine zu verwenden; Vieles ist möglich. Möge Ihre Fantasie mit uns kommen!
Servoantrieb(lat. servus – Diener, Gehilfe; bringen, was man nähen soll)- Fahren Sie von Keruvan durch negativer Rückruf , mit dem Sie die Parameter des ROC präzise einstellen können.
Der Servoantrieb wird am häufigsten in der Robotik eingesetzt. Vor allem wenn es um die hochpräzise Bewegung von Gegenständen und Gegenständen geht, ist darauf ein Wegweiser nicht mehr wegzudenken. Dieses Problem entsteht mit der Zeit, wenn mechanische Arbeiten jeglicher Art zerstört werden (Zubereiten, Kochen, Mahlen, Bewegen von Produkten auf einem Förderband usw.). Solche Roboter sollten Manipulatoren haben, die wie mechanische Hände aussehen. Vlasna, die berühmte Industrierobotik, die weltweit zur Automatisierung der Produktion eingesetzt wird, wird uns vor den Manipulatoren präsentiert. Und kein solcher Manipulator kommt ohne miteinander verbundene Servoantriebe aus. Warum?
Alles auf der rechten Seite wird vom Servoantrieb gesteuert. Ein Servoantrieb ist ein Antrieb, bei dem eine Gegenkopplungsverbindung erzeugt wird, die eine präzise Steuerung der Parameter der Antriebswelle (meistens der Abtriebswelle) ermöglicht. Um ein solches Tor zu erstellen, müssen Sie den Positionssensor der Ausgangslaterne des Servoantriebs verwenden, oder es können auch Fluidsensoren, Geräuschsensoren usw. angeschlossen werden. Es scheint zu hängen oder sich im Lied der Position zu drehen. Diese Position wird installiert und „überprüft“, bis ein Befehl zum Ändern der Position gefunden wird. Beispielsweise wird ein Signal gesendet, dass die Welle in der Eckposition von 90 Grad installiert ist. Die Welle dreht sich in ihrer Position und trimmt, bis ein Signal über eine neue Position eintrifft. Solche Möglichkeiten wirken sich stark auf den Servoantrieb des Primärgetriebemotors aus, der sich nicht kontinuierlich drehen kann, solange Spannung an ihm anliegt. Wenn ein Roboter mit solchen Antrieben ausgestattet ist, kann er daher wie eine menschliche Hand zusammenbrechen und den zerstörbaren Roboter zerstören.
In der Branche gibt es viele verschiedene Arten von Servoantrieben. In diesem Artikel betrachten wir elektrische Servoantriebe in der allgemeinen Industrie. Vereinfacht ausgedrückt verfügen solche Servos über eine Welle, die sie umschließt. Der Einfachheit halber betrachten wir das Gerät des Hobi-Servoantriebs SG-90 (Abb. 1), der aktiv zur Erstellung erster Modelle von Robotern und anderen fliegenden oder fliegenden Mechanismen verwendet wird. Der Hobi-Servo-Antrieb ist im Gegensatz zum Industrie-Antrieb kleiner, entwickelt weniger Kraft, ist ansonsten geschützt und vom Prinzip her absolut identisch mit seinem Industrie-Pendant.
Maljunok 1
Das Gerät für den Hobi-Servoantrieb ist in Teil 2 dargestellt. Dieses Lager umfasst einen Elektromotor, ein Getriebe mit Zahnradsatz, ein Potentiometer (das die Funktion des Positionssensors für das Rückführgestänge ändert) und eine elektronische Steuerplatine für den Elektromotor und einem Gehäuse, das die gesamte Kapazität aufnimmt Anhand welcher kleinen Hinweise führen Sie durch, mit welcher Art von Servoantrieb müssen Sie leben und folgen? Es besteht aus 3 Drähten: dem „Plus“-Draht, dem „Minus“-Draht und dem Draht, der das Signal sendet, das ihn steuert. Bei verschiedenen Modellen von Hob-Servos können die Darts unterschiedliche Farben haben. Es ist sinnvoll, zunächst die „Plus“-Lebensdauer der roten Farben und die „Minus“-Lebensdauer der schwarzen Farben durchzuführen. Für den Signalpfeil (zur Übertragung des Farbsignals) gibt es keine eindeutigen Farbstandards. Bei einigen Servoantrieben kann das Signalkabel weiß, orange oder braun sein.

Maljunok 2
Für Keruvannya übernahmen solche Motoren den Keruyuchy-Signalstandard. Es besteht aus sich ständig wiederholenden Impulsen und, wie wir sagen, niedrigen Impulsen (Abb. 3). Die Frequenz dieser Impulse wird allmählich konstant und beträgt 50 Hz. Komm raus, wie spät ist es?Impulse (Stunde zwischen den Vorderflanken der Schiffsimpulse) eingestellt auf 1s/50 = 0,02 Sekunden, dann 20 Millisekunden.

Maljunok 3
Wichtig ist, dass die Position der Abtriebswelle des Servoantriebs durch die Stärke des zugeführten Impulses bestimmt wird. Zur Verdeutlichung zeigt Abb. 4 den ungefähren Zusammenhang zwischen der Breite des Impulses in Taktkoordinaten und der Drehrichtung der Servoantriebswelle. Die Steuerung der Drehung der Servoantriebswelle erfolgt durch zusätzliche Impulse mit einer Frequenz von 1 bis 2 ms (Millisekunden).

Maljunok 4
Wie aus der Grafik ersichtlich ist, wird zur Steuerung des Servoantriebs lediglich ein Signal aus der Pulsweitenmodulation – PWM – verwendet. Was es mit dieser PWM auf sich hat, können Sie der folgenden Statistik auf unserer Website entnehmen.
Und wie transformiert sich die Breite des Impulses in die Abtriebswelle?
Wie Baby 2 zugeordnet, verfügt das Servoantriebsgehäuse über ein weiteres elektronisches Motorsteuermodul. Das an den Servoantrieb gesendete Signal geht auf der Platine verloren. Und die Achse, die durch dieses Signal erzeugt wird, wird im Blockdiagramm von Baby 5 weiter dargestellt, das wir Schritt für Schritt analysieren. Das Hautstadium wird mit einem Mastdarm oder einem Kreis dargestellt und nummeriert. In der Mitte dieser direkten Hautbilder befinden sich die Geräte, in denen das Signal verarbeitet wird.

Maljunok 5
Außerdem gelangt das Eingangssteuersignal SP mit PWM-Modulation zu einer speziellen Mikroschaltung mit logischen Elementen, die dann in die Spannung Upr umgewandelt wird (Stufe Nr. 1). Nach diesem Signal Ucontrol (Kernspannung) wird das Spannungsausgleichselement gefunden. Dieses Element wird als Summator bezeichnet, aber tatsächlich erzeugt es aus dem Eingangssignal Ucontrol eine Spannung Urev (Rücklaufspannung), die über den Rücklaufanschluss vom Austauschwiderstand fließt (Schritt Nr. 2).
Die entstandene Spannung Ucorr (korrigierbare Spannung) wird durch den Booster (Schritt Nr. 3) zwangsweise in Kraft gesetzt und dem Elektromotor zugeführt. Der Motor dreht sich (Schritt Nr. 4) und treibt die Abtriebswelle zum Servoantrieb und gleichzeitig den Rotationssensor in Form eines Potentiometers an. Wenn der Potentiometergriff gedreht wird, ändert sich die Spannung und kommt heraus, sodass sich die Drehung der Welle in die Spannung Urev ändert (Schritt Nr. 5). Diese Spannung U wird mit der Spannung Ucontrol abgeglichen (Schritt Nr. 2), und die Differenz erscheint, sobald wir zum Booster zurückkehren (Schritt Nr. 3) und so weiter. Das Signal besteht darin, mit der Lanzette vom Kragengelenk bis zu der Stunde zu „gehen“, in der die Beziehung endet Ucontrol = Urev. Dann wird die Beschleunigung gleich 0 und der Motor beginnt langsamer zu werden. Dies geschieht, wenn sich die Servoantriebswelle in einer Position befindet, die dem Eingangssignal entspricht, das den Super steuert.
Lassen Sie uns alles ins rechte Licht rücken. Die Servoantriebswelle ist mechanisch mit dem Potentiometergriff verbunden. Gleichzeitig mit der Drehung des Servoantriebs dreht sich das Potentiometer, wodurch sich seine Lage und die Ausgangsspannung Urev ändern. Anscheinend liegt der Spannungsausgang des Potentiometers direkt an der Stelle, an der sich der Servoantrieb dreht. Gleichzeitig legt das Eingangssignal Ucontrol des Servoantriebs mit einer Trivalität von Impulsen von 0,001 bis 0,002 Sekunden den Spannungspegel Ucontrol fest, der angibt, um wie viel sich die Servoantriebswelle drehen muss. Der Arm des Elektromotors wird in dem Moment, in dem sich die Servoantriebswelle selbst in der erforderlichen Position befindet, vom Arm als Reaktion auf das Signal Ucontrol des Blinkers Uobraz erreicht. Und der Booster für Stufe Nr. 3 ist notwendig, damit der Elektromotor mit einer starken Spannung versorgt wird und der Motor die Welle schnellstmöglich zum Servoantrieb in die vorgegebene Position bewegt.
Bringen Sie den Servomotor an
Wie oben erwähnt, müssen Sie zur Steuerung des Servomotors die PWM-Parameter verwenden. Eine solche PWM kann auf verschiedene Arten erzeugt werden. Zeigen wir ihnen, was sie tun.
1. Steuerung des Servomotors über einen zusätzlichen 555-Timer . Der 555-Timer-Chip kann im Impulsgeneratormodus betrieben werden (einen Bericht zu diesem Chip finden Sie im Begleitartikel). Es ist dann möglich, solche Parameter für den Betrieb dieser Mikroschaltungen so auszuwählen, dass die von uns benötigten Impulse erzeugt werden. Indem wir die Geschwindigkeit dieser Impulse ändern, d. h. indem wir die Geschwindigkeit der Impulse von 0,001 auf 0,002 Sekunden ändern, stellen wir die Drehzahl der Servoantriebswelle ein.
Um ein PWM-Signal umzusetzen, ist es notwendig, eine Schaltung mit geregeltem Pulsabstand bei einer konstanten Frequenz von 50 Hz zu erstellen. Die Parameter der Komponenten im Diagramm (Abb. 6) sind so gewählt, dass die Sicherheit gewährleistet ist. Wenn das Signal des Keruban alle Gemüter befriedigen soll, muss es umgekehrt werden. Der Transistor in der Schaltung ist unbedingt erforderlich. Um die Temperatur innerhalb der angegebenen Bereiche zu ermitteln, benötigen Sie ein Potentiometer mit einer maximalen Unterstützung von 20 kOhm. Wir werden zwei Potentiometer mit jeweils 10 kOhm verwenden (dieselben Potentiometer werden im Hauptsatz des Evolvector der 1. Ebene verwendet, diese Schaltung wird ausführlich beschrieben. Die Betriebsgeschwindigkeit des Servomotors ist auf 180 Grad eingestellt. und die Griffe eines Potentiometers des Servoantriebs dreht sich um weitere 90 Grad, für zusätzliches Wickeln um weitere 90 Grad.

Maljunok 6
Es ist besser, dieses Diagramm zu lesen, und Sie können es erwerben, indem Sie das Basisset des 1. Level-Evolvectors kaufen.
2. Ansteuerung des Stellmotors mit Hilfe einer Steuerung. Z Es ist auch möglich, mit Hilfe eines zusätzlichen Controllers das benötigte PWM-Signal zu erzeugen. Sie können den Controller beispielsweise auf der Arduino-Plattform programmieren. Um die Programmierung des Servomotor-Steuerungsalgorithmus (PWM-Generierung) so weit wie möglich zu vereinfachen, beginnen Sie mit dem Schreiben von Programmen, die Bibliotheken genannt werden. Unser faltbarer Programmcode, den wir vom Korrespondenten erhalten, wird beim Verbinden der Bibliothek mit unserem Hauptprogramm mithilfe von Kurzbefehlen in die von uns benötigten Funktionen übersetzt. Aus algorithmischer Sicht ist die Steuerung von Geräten wie Servomotoren äußerst einfach und manuell.
Anschlussplan, sowieEine Skizze (Programm) für den Servomotor-Controller Arduino zeigt die kleine 7.
Maljunok 7
ACHTUNG: Der Anschluss des Servomotors an die Platte erfolgt in der Mitte, wie am Stoß (Abbildung 7), dies ist nicht erforderlich. Für unsere geringe Anzahl an Anschlüssen verfügen wir über einen Servomotor der Kategorie „Minus“, der auch kleine Durchflussmengen, die wir regelmäßig verarbeiten, direkt auf der Platine speist. Ein Servoantrieb in Standardgröße erfordert eine größere Kraft, was zu Überhitzung und Schäden am Controller führen kann. Verbindungen zur Lebensdauer der Motoren dürfen nur über eine Reihe von Antriebssträngen hergestellt werden, insbesondere wenn die Kraft gleichzeitig auf Servos übertragen wird.
#enthalten<Servo.h>- Dieser Befehl bedeutet, dass die Bibliothek zur Servoantriebssteuerung verbunden wird. Diese Bibliothek befindet sich auf der Evolvector-Diskette, die zusammen mit unseren anderen Level-Sets geliefert wird. Sie können sie auch im Internet finden und im Ordner „Bibliotheken“ Ihrer Arduino IDE ablegen.
Die angeschlossene Bibliothek enthält eine große Anzahl von Befehlen. Wir betrachten nur diejenigen, die im Programm verwendet werden.
Servodvig; - das ist eine Veränderung besonderer Art. dvig- dies ist veränderbar (der Name ist ausreichend gewählt). Servo- diese Art von Änderung (ein spezieller Typ, der in der erworbenen Bibliothek angegeben ist). Sie können bis zu 12 austauschbare Typen installieren, um 12 Servos zu steuern. Mit anderen Worten, mit diesem Befehl haben wir der Platine mitgeteilt, dass wir einen Servoantrieb haben, den wir aufgerufen haben dvig.
dvig.attach(9);- Dieser Befehl bedeutet, dass der Servoantrieb ( dvig) addieren sich zu 9 Pinu (visnovku).
dvig.write (90); - Dieser Befehl ändert den Servoantrieb ( dvig) in die mittlere Position (90 Grad) drehen.
dvig.write(0); - Dreht den Servoantrieb auf eine Position von 0 Grad.
dvig.write (180); - Dreht den Servoantrieb um eine Position von 180 Grad.
Was die Zeilen des Programms bedeuten, erfahren Sie auf den Seiten unserer Website oder erfahren Sie bei den Hauptmitarbeitern, wie Sie das Lager betreten
Dieser Artikel behandelt Servoantriebe: ihre Geräte, Funktionen, Servoantriebsanschlüsse, Servoantriebsanschlüsse, Arten von Servoantrieben und ihre Ausrichtung. Lassen Sie uns beginnen und verstehen, was ein Servoantrieb ist.
Verstehen Sie den Servoantrieb
Unter einem Servoantrieb versteht man am häufigsten einen Mechanismus mit einem Elektromotor, der dazu gebracht werden kann, sich in eine bestimmte Richtung zu drehen und sich an diese Position anzupassen. Dies liegt jedoch nicht völlig außerhalb der Bedeutung.
Um es ganz klar auszudrücken: Der Servoantrieb wird über ein negatives Steuergestänge angetrieben, wodurch Sie die Parameter des Lenkrads genau steuern können. Ein Servoantrieb ist eine Art mechanischer Antrieb, der einen Sensor (Position, Fließfähigkeit, Kraft usw.) im Lager und eine Antriebssteuereinheit enthält, die automatisch die erforderlichen Parameter am Sensor und am Gerät entsprechend der äußeren Einstellung anpasst. Ihre Bedeutung .
Mit anderen Worten:
Der Servoantrieb empfängt als Eingabe den Wert des Parameters, den er steuert. Zum Beispiel um die Ecke
Die Heizeinheit entspricht den Werten auf ihrem Sensor
Basierend auf dem Ergebnis der Anpassung wird die Aktion ausgeführt, zum Beispiel: Drehen, Beschleunigen oder Erhöhen, sodass der Wert des internen Sensors näher an den Wert des externen Parameters herankommt, der steuert
Die Servos sind extrem breit, was die Anzahl der Aufgaben und Servos reduziert, die die vorgegebene Wickelgeschwindigkeit einhalten.
Unten ist ein typischer Hobi-Servoantrieb dargestellt.
Wie werden die Servos gesteuert?
Anbau an Servoantrieb
Servoantriebe tragen eine Reihe von Speicherteilen.

Antrieb – Elektromotor mit Getriebe. Um die Elektrik in mechanische Rotation umzuwandeln, ist das notwendig Elektromotor. Meistens ist die Fließfähigkeit des Motors jedoch zu groß für einen praktischen Motor. Um die Liquidität zu reduzieren, verwenden Sie Vikoryst Getriebe: ein Mechanismus mit Zahnrädern, der Drehmoment überträgt und umwandelt.
Durch Einschalten des Elektromotors können Sie die Abtriebswelle umwickeln – das Endzahnrad des Servoantriebs, an dem Sie alles anbringen können, was Sie möchten. Damit die Position vom Gerät kontrolliert wird, ist ein Schutz erforderlich Blinkersensor - Encoder, der beim elektrischen Signal umkehren wird. Zu diesem Zweck wird häufig ein Potentiometer verwendet. Beim Drehen des Potentiometer-Schiebers wird die Unterstützung proportional zur Drehung verändert. Auf diese Weise können Sie mit dieser zusätzlichen Hilfe einen Gewindefräser für den Mechanismus installieren.
Zwischen Elektromotor, Getriebe und Potentiometer im Servoantrieb befindet sich eine elektronische Füllung, die den Empfang eines neuen Parameters, den vom Potentiometer abgelesenen Wert, deren Ausrichtung und das Ein-/Ausschalten des Motors anzeigt. Vaughn ist für die Unterstützung der negativen Konjunktur verantwortlich.
Es sind drei Pfeile erforderlich, um das Servo zu erreichen. Zwei davon zeigen die Lebensdauer des Motors an, der dritte liefert ein Signal, mit dem die Position des Gerätes eingestellt wird.
Sehen wir uns nun an, wie der Servoantrieb gesteuert wird.
Servoantriebssteuerung. Schnittstelle für Keramiksignale
Um dem Servoantrieb seine Position mitzuteilen, müssen Sie zu welchem Zweck ein Signal senden. Aushärtungssignal – Impulse mit konstanter Frequenz und variabler Breite.

Die Position, die der Servoantrieb einnehmen darf, muss bei der Anwesenheit von bis zu zwei Impulsen bleiben. Wenn ein Signal den Schaltkreis erreicht, der es steuert, versetzt der darin befindliche Impulsgenerator seinen Impuls in Schwingung, dessen Intensität über ein Potentiometer angezeigt wird. Der andere Teil der Schaltung entspricht der Intensität der beiden Impulse. Sobald der Schaden auftritt, beginnt der Elektromotor zu arbeiten. Direkt wird der Wickel dadurch angezeigt, welcher der Impulse kurz ist. Sobald die Impulse stärker werden, beginnt der Elektromotor langsamer zu werden.
Bei Hobby-Servern vibrieren die Impulse am häufigsten mit einer Frequenz von 50 Hz. Das bedeutet, dass der Impuls alle 20 ms einmal gesendet und empfangen wird. Wenn der Impulsimpuls 1520 µs beträgt, bedeutet dies, dass der Servoantrieb gezwungen wird, die Mittelposition einzunehmen. Eine Erhöhung oder Änderung des Impulses führt dazu, dass sich der Servoantrieb auf ähnliche Weise hinter dem Pfeil oder gegen den Pfeil dreht. In diesem Fall gibt es eine obere und untere Grenze zwischen dem Impuls. Die Servo-Bibliothek für Arduino hat folgende Werte für den Impulsimpuls: 544 µs – für 0° und 2400 µs – für 180°.
Bitte beachten Sie, dass es bei Ihrem spezifischen Gerät so aussehen kann, als ob die Werkseinstellungen die Standardeinstellungen überschrieben hätten. Die Servoantriebe stellen eine Pulsbreite von 760 µs bereit. Die Mittelstellung beträgt 760 µs, genau wie bei herkömmlichen Servos beträgt die Mittelstellung 1520 µs.
Es bedeutet auch, dass es mehr als nur zuvor eingenommen wurde. Bei demselben Modell kann es jedoch zu einem Defekt des Servoantriebs kommen, der bei Vibrationen auftreten kann, was dazu führt, dass der Arbeitsbereich der Impulse leicht eingeschränkt ist. Für einen präzisen Betrieb der Haut kann ein bestimmter Servoantrieb kalibriert werden: Durch Experimentieren ist es notwendig, die richtige Reichweitencharakteristik auszuwählen.
Wenn Sie Ihren Respekt wirklich verlieren wollen, dann lohnt es sich in der Terminologie. Oft wird die Methode zur Steuerung von Servos als PWM/PWM (Pulsweitenmodulation) oder PPM (Pulspositionsmodulation) bezeichnet. Dies ist nicht der Fall und die Verwendung dieser Methoden kann zu Schäden am Laufwerk führen. Der korrekte Begriff ist PDM (Pulse Duration Modulation). Für manche ist die Dauer der Impulse wichtig und die Häufigkeit ihres Auftretens nicht so wichtig. 50 Hz sind nicht die Norm, aber der Servoantrieb arbeitet sowohl bei 40 als auch bei 60 Hz einwandfrei. Das Einzige, was jede Mutter braucht, ist, dass sie bei einer starken Änderung der Venenfrequenz zucken kann und bei einer Abnahme der Spannung und bei einer starken Frequenz (z. B. 100 Hz) überhitzen und aufhören kann Okay.
Eigenschaften von Servoantrieben
Lassen Sie uns nun herausfinden, was Servos sind und welche Eigenschaften sie haben.
Drehmoment und Drehzahl
Lassen Sie uns nun über zwei sehr wichtige Eigenschaften des Servoantriebs sprechen: Drehmoment und über Drehgeschwindigkeit.
Das Kraftmoment oder das Rotationsmoment ist eine vektorielle physikalische Größe, bei der es sich um die traditionelle Addition des von der Drehachse zum Punkt der gemeldeten Kraft gezogenen Radiusvektors zum Vektor der Kraft handelt. Charakterisiert die äußere Krafteinwirkung auf einen festen Körper.

Vereinfacht ausgedrückt zeigt diese Eigenschaft, wie wichtig es ist, dass ein Servoantrieb an einem bestimmten Tag ruhig bleibt. Da das Drehmoment für die Drehung des Servoantriebs mehr als 5 kg×cm beträgt, bedeutet dies, dass der Servoantrieb bis zu 1 cm horizontal auf der Vase platziert und am anderen Ende 5 kg aufgehängt wird. Oder äquivalent: Es ist wichtig, 5 cm zu 1 kg hinzuzufügen.
Die Geschwindigkeit des Servoantriebs variiert im Stundenintervall, das der Servoantrieb benötigt, um sich um 60° zu drehen. Die 0,1 s/60°-Kennlinie bedeutet, dass sich das Servo in 0,1 s um 60° dreht. Es ist schwierig, die Geschwindigkeit mit einem größeren Wert, U/min, zu berechnen, aber es kommt vor, dass bei der Beschreibung von Servos diese Einheit am häufigsten verwendet wird.
Bitte beachten Sie, dass Sie manchmal einen Kompromiss zwischen diesen beiden Eigenschaften eingehen müssen, denn wenn Sie einen zuverlässigen Servoantrieb wünschen, der viel Leistung erbringen kann, müssen wir darauf vorbereitet sein, dass sich die Anlage vollständig drehen kann. Und wenn wir einen sehr starken Antrieb wollen, wird es sehr einfach sein, ihn aus der Position der Gleichheit zu entfernen. Wenn sich derselbe Motor dreht, wird das Gleichgewicht durch die Konfiguration der Zahnräder im Getriebe bestimmt.
Natürlich können wir jetzt ein Gerät verwenden, das viele Schmerzen und Kopfschmerzen verursacht, sodass seine Eigenschaften den Bedürfnissen entsprechen.
Formfaktor
Servoantriebe variieren in der Größe. Und obwohl es keine offizielle Klassifizierung gibt, versuchen die Hersteller seit langem, aus den häufig verwendeten Umformungen von Befestigungselementen herauszufinden, wie viele Größen es gibt. Sie können unterteilt werden in:
klein
Standard
Der Gestank lauert mit diesen charakteristischen Ausmaßen:
Es gibt auch sogenannte „Sondertypen“-Servos mit Abmessungen, die nicht für diese Klassifizierung geeignet sind, obwohl die Anzahl solcher Servos recht gering ist.
Interne Schnittstelle
Servoantriebe sind entweder analog oder digital. Was sind also ihre Stärken, ihre Vor- und Nachteile?
Die Geräusche werden durch nichts beeinflusst: Die Elektromotoren, Getriebe und Potentiometer sind gleich, sie werden nur durch die interne Keramikelektronik beeinflusst. Anstelle einer speziellen Mikroschaltung für einen analogen Servoantrieb in einem digitalen Zwilling können Sie auf der Platine einen Mikroprozessor installieren, der Impulse empfängt, diese analysiert und den Motor steuert. Somit hat ein physischer Mensch weniger Möglichkeiten in der Art und Weise, wie die Impulse vom Motor verarbeitet und verarbeitet werden.

Leider erhält der Servoantrieb immer noch die Impulse, die er steuert. Danach entscheidet der analoge Servoantrieb über die Positionsänderung und sendet bei Bedarf ein Signal an den Motor. Es ertönt mit einer Frequenz von 50 Hz. Auf diese Weise stellen wir 20 ms ein – die minimale Reaktionsstunde. Zu diesem Zeitpunkt kann es erforderlich sein, die Position des Servoantriebs zu ändern. Aber es gibt nur ein Problem. Im Ruhezustand des Elektromotors liegt keine Spannung an, bei geringem Druck am Elektromotor wird ein kurzes Signal niedriger Spannung an den Elektromotor gesendet. Je mehr Inspiration, desto stärker das Signal. Dadurch kann der Servoantrieb bei kleinen Eingangsgrößen den Motor nicht schnell umdrehen oder ein hohes Drehmoment entwickeln. „Tote Zonen“ verschwinden im Laufe einer Stunde.
Dieses Problem kann durch eine Erhöhung der Empfangsfrequenz, der Signalverarbeitung und des Betriebs des Elektromotors verursacht werden. Digitale Servoantriebe nutzen einen speziellen Prozessor, der Steuerimpulse empfängt, verarbeitet und Signale mit einer Frequenz von 200 Hz oder mehr an den Motor sendet. Es stellt sich heraus, dass der digitale Servoantrieb besser auf externe Eingaben reagieren kann, was es uns ermöglicht, die zum Drehen erforderliche Geschwindigkeit und das erforderliche Drehmoment zu entwickeln und somit die vorgegebene Position besser beizubehalten, was gut ist. Natürlich wird in diesem Fall mehr Strom verbraucht. Außerdem sind digitale Servos in der Herstellung faltbar und kosten daher deutlich mehr. Nun ja, nur zwei Mängel – alle Nachteile, die digitale Servos haben. Aus technischer Sicht können analoge Servos leicht überfordern.
Getriebematerialien
Zahnräder für Servos gibt es aus verschiedenen Materialien: Kunststoff, Carbon, Metall. Sie sind alle sehr unterschiedlich, abhängig von der spezifischen Aufgabe und den für die Installation erforderlichen Eigenschaften.

Zahnräder aus Kunststoff, meist Nylon, sind sehr leicht, nicht verschleißanfällig und bei Servos breiter. Die Gerüche wirken sich nicht auf große Vorteile aus, aber da sich die Vorteile auf kleine übertragen, sind Nylon-Getriebe die beste Wahl.
Carbon-Zahnräder sind im Vergleich zu Nylon-Zahnrädern langlebiger und verschleißen praktisch nicht. Das größte Manko ist die Straße.
Metallgetriebe sind das Wichtigste, sie schützen vor Gestank und sorgen für maximale Aufmerksamkeit. Wenn Sie müde genug sind, müssen Sie fast jede Saison den Gang wechseln. Titanzahnräder sind sowohl hinsichtlich der technischen Eigenschaften als auch des Preises der Favorit unter den Metallzahnrädern. Leider wird Sie der Gestank teuer zu stehen kommen.
Kollektor- und bürstenlose Motoren
Es gibt drei Arten von Servomotoren: einen Basismotor mit Kern, einen Motor ohne Kern und einen bürstenlosen Motor.

Der Primärmotor mit Kern (rechtsdrehend) verfügt über einen starken Schieberotor mit feiner Wicklung und Magneten darum herum. Der Rotor besteht aus einem einzigen Abschnitt. Wenn sich der Motor dreht, erzeugt der Rotor eine kleine Schwingung des Motors, während der Abschnitt durch den Magneten läuft. Dadurch entsteht ein Servoantrieb, der vibriert und weniger genau ist Servoantrieb mit einem Motor ohne Kern. Ein Motor mit leerem Rotor (linksdrehend) bewegt einen einzelnen Magnetkern mit einer Wicklung in Form eines Zylinders oder Rings um einen Magneten. Das kernlose Design ist leicht und hat keine Abschnitte, was zu einem reibungsloseren und vibrationsfreien Betrieb führt. Solche Motoren sind teurer, bieten aber ein höheres Maß an Kontrolle, Drehmoment und Geschwindigkeit als Standardmotoren.

In letzter Zeit sind Servoantriebe mit bürstenlosen Motoren auf den Markt gekommen. Die Vorteile sind die gleichen wie bei anderen bürstenlosen Motoren: Es gibt keine Bürsten, was bedeutet, dass sie die Halterung des Wicklers nicht beschädigen und nicht verschleißen, Fließfähigkeit und Drehmoment sind höher als bei bürstenlosen Motoren. Servoantriebe mit bürstenlosem Motor sind die teuersten Servos, die eine bessere Leistung bieten als Servos mit anderen Motortypen.
Verbindungen zu Arduino
Viele Servos können direkt an Arduino angeschlossen werden. Für welche Art eignet sich ein Zug aus drei Darts:
Chervoniy - Taverne; An den 5V-Kontakt oder direkt an die Lebensader anschließen
braun oder schwarz – Erde
gelb oder weiß – Signal; verbindet sich mit dem digitalen Ausgang des Arduino.
Um Arduino anzuschließen, können Sie ganz einfach eine Port-Erweiterungskarte wie Troyka Shield verwenden. Wenn Sie mit ein paar zusätzlichen Drähten möchten, können Sie das Servo über das Steckbrett oder direkt an die Arduino-Kontakte anschließen.
Sie können selbst Laserimpulse erzeugen, bei einem größeren Einstellungsbereich wird der Einfachheit halber jedoch die Standard-Servo-Bibliothek verwendet.
Obezhennya-Taverne
Der primäre Hobi-Servoantrieb hält während des Betriebs über 100 mA aufrecht. Bei Verwendung von Arduino können Sie bis zu 500 mA sehen. Wenn Sie in Ihrem Projekt einen kompakten Servoantrieb einbauen müssen, sollten Sie darüber nachdenken, diesen durch zusätzliche Hardware in den Schaltkreis einzubauen.
Werfen wir einen Blick auf die Stoßverbindung des 12V-Servoantriebs: 
Berücksichtigen Sie die Anzahl der angeschlossenen Servos.
Auf den meisten Arduino-Boards unterstützt die Servo-Bibliothek die Steuerung von nicht mehr als 12 Servos, auf dem Arduino Mega erhöht sich diese Zahl auf 48. Allerdings gibt es einen kleinen Nebeneffekt der Bibliothek: Wenn Sie nicht mit einem Arduino Mega arbeiten, dann Es wird schwierig, die Funktion analogWrite() bei 9 und 10 Kontakten zu verwenden, unabhängig davon, ob der Servoantrieb an einen der Kontakte angeschlossen ist. Auf dem Arduino Mega können Sie bis zu 12 Servos anschließen, ohne die PWM/PWM-Funktionalität zu beeinträchtigen; wenn Sie eine große Anzahl von Servos haben, können Sie analogWrite() nicht auf den Pins 11 oder 12 verwenden.
Funktionalität der Servo-Bibliothek
Mit der Servo-Bibliothek können Sie Servoantriebe programmieren. Wechseln Sie dazu auf den Servotyp. Die Steuerung umfasst folgende Funktionen:
attachment() – fügt eine Änderung zu einem bestimmten Pin hinzu. Für diese Funktion gibt es zwei Syntaxoptionen: servo.attach(pin) und servo.attach(pin, min, max). In diesem Fall ist Pin die Nummer des Pins, an dem der Servoantrieb ankommt, Min und Max sind die maximale Anzahl an Impulsen in Mikrosekunden, die einer Drehung von 0° und 180° entsprechen. Für die Reinigung liegen die Werte konstant bei 544 μs und 2400 μs.
write() – befiehlt dem Servoantrieb, den neuen Parameterwert zu akzeptieren. Erweiterte Syntax: servo.write(angle) , wobei Winkel die Richtung ist, in die sich der Servo drehen kann.
writeMicroseconds() – sendet einen Befehl zum Senden eines zweiten Impulses an den Servo, der das Low-Level-Analogon des Vorwärtsbefehls ist. Erweiterte Syntax: servo.writeMicroseconds(uS) , wobei uS der zusätzliche Impuls in Mikrosekunden ist.
read() – Liest genauer die Werte des Fachs, in dem sich der Servoantrieb befindet. Erweiterte Syntax: servo.read() rotiert den gesamten Wert von 0 auf 180.
attachment() – Überprüfung, ob der angehängte Wert in einen bestimmten Pin geändert wird. Syntax der Angriffe: servo.attached() , die logische Wahrheit wendet sich, wenn die Änderung vollständig aufgefressen wurde, oder die Lüge in der letzten Phase ist.
detach() – erledigen Sie die Arbeit, kehren Sie die Aktion attachment() um, sodass die Änderung ab dem Pin vorgenommen wird, dem sie zugewiesen wurde. Syntax zum Trennen: servo.detach().
Alle Methoden in der Servo2-Bibliothek basieren auf Servo-Methoden.
Hintern der Servo-Bibliothek
Ersatz
Servoantriebe gibt es in verschiedenen Ausführungen, manche sind besser, manche günstiger, manche zuverlässiger, manche präziser. Und bevor Sie einen Servoantrieb kaufen, achten Sie darauf, dass dieser über bessere Eigenschaften verfügt, damit er für Ihr Projekt geeignet ist. Viel Glück bei Ihren Bemühungen!
Servoantrieb (Antrieb zum Nähen)- Fahren Sie über eine negative Gateway-Verbindung nach Keruvannyams, wodurch Sie die Parameter des Rukhu präzise steuern können.
Ein Servoantrieb ist jede Art von mechanischem Antrieb (Gerät, Bedienelement), der einen Sensor (Position, Fluidität usw.) und eine Antriebssteuereinheit (elektronische Schaltung oder mechanisches Traktionssystem) enthält, die die notwendigen Parameter automatisch an den Sensor anpasst ( i Ja, am Gerät) bis zum vorgegebenen externen Wert (Stellung des Bedienknopfes bzw. Zahlenwert bei anderen Systemen).
Material aus Wikipedia – der freien Enzyklopädie
Servoantrieb ist ein Antriebssystem, das über einen weiten Bereich der Fluiditätssteuerung dynamische, hochpräzise Prozesse gewährleistet und deren gute Wiederholbarkeit gewährleistet. Dieses System ist darauf ausgelegt, Drehmoment, Fluidität und Position mit spezifizierter Präzision und Dynamik zu erzeugen. Klassisch Servoantrieb besteht aus einem Motor, einem Positionssensor und einem Steuersystem, das über drei Regelkreise (Position, Geschwindigkeit und Durchfluss) verfügt.
Das Wort „servo“ ähnelt dem lateinischen Wort „servus“, was Diener, Sklave, Gehilfe bedeutet. In Maschinenräumen war es wichtig, über zusätzliche Antriebe zu verfügen (Antriebe an Werkbänken, Antriebsroboter etc.). Heute hat sich die Situation jedoch geändert, die Kopfantriebe werden nun mit Hilfe von Servotechnik realisiert.
Zu dieser Stunde, Servos Hier besteht ein Problem, da die Regelung der primären industriellen Frequenzumrichter nicht präzise genug ist. Zastosuvannya mit hohem Säuregehalt Servoantriebe notwendig für eine hochproduktive Anlage, bei der die Produktivität das Hauptkriterium ist. Servoantriebe mit Präzisionssystemen zur Aufrechterhaltung der Fließfähigkeit und Positionierung von Industrierobotern und hochpräzisen Maschinen ausgestattet sein. Servo Auch installiert auf Lehrenbohrbänken, auf verschiedenen technologischen Transportsystemen, auf verschiedenen Hilfsmechanismen usw. Servos.
Universal Servoantrieb
Universal Servoantrieb zeichnet sich durch einen reichhaltigen Funktionsumfang, die Möglichkeit zur Steuerung verschiedener Servomotorentypen (sowohl synchron als auch asynchron), die Möglichkeit zum Betrieb mit unterschiedlichen Torsensoren sowie die Verfügbarkeit einer Reihe von Optionen und Erweiterungen aus. Scheinbar universell Servoantrieb auf dem KEB F5-Multi (Nimechchina) und Control Techniques Unidrive SP. (England)
Servoantrieb basierend auf KEB F5-Multi
Servoantrieb KEV" align="RIGHT" width="20%" border="0">Elektrischer Antriebsregler mit Torschaltung für Synchron- und Asynchronmotoren. Speziell für den Betrieb im geschlossenen Kreislauf konzipiert, mögliche Varianten des Kreislaufanschlusses:
Resolver
Encoder
Sin-Cos-Positionssensor
absoluter Positionssensor
EnDat, Hiperface oder Tachogenerator
Hauptmerkmale und Eigenschaften:
breites Spektrum an Drücken
Spannung 220 oder 380 V
Es ist möglich, mit einem stetigen Strom zu leben
sensorloser Keruvannya-Motor
galvanisch getrennte analoge und digitale Ein-/Ausgänge
Relais und Transistor-programmierte Ausgänge
Selbstverständlich ist es möglich, das Konzept der dezentralen Heizung mit einem Antriebssystem umzusetzen:
Regulierung von Geschwindigkeit und Drehmoment
Positionskontrolle
schmale Wickelmodi
Cam-Remixer
Elektronische Kurvenscheibe
Einachsige Positionierung
Position des Drehtisches
Alle Antriebe unterstützen die neuesten Schnittstellen Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet und KEB-HSP5/DIN 66019-II.
Vikonavchy und besonders Servoantrieb
Der letzte Servoantrieb wird von der Steuerung gesteuert und ermöglicht so die Auswahl von Funktionen und Einstellungen, die für den Roboter einfach sind. Daher ist der endgültige Servoantrieb wirtschaftlicher. Werfen wir einen Blick auf die Vikonau Servo auf dem Hintern von synchron Servoantriebe Mecapion.
Mecapion-Servoantrieb

Synchron Servo Mecapion (ex. Metronix) ist ein Basisprodukt für Systemlösungen in der industriellen Automatisierung, das russischen Arbeitern seit langem bekannt ist.
Haupteigenschaften Servoantriebe Metronix
Druckbereich von 0,03 bis 11 kW
Einbau eines Rekuperator-Bausatzes, der die Energieumkehr ermöglicht, und Einbau eines Schlüssels zum Abführen der Energie während der dynamischen Galvanisierung
Testmodus der Roboter-Frequenzanpassung
Die Funktionen zur Vibrationsreduzierung beim Einschalten des Motors und seiner Nabe ermöglichen das Einschalten des Roboters durch Ändern der Frequenz im Kolivalmodus sowohl bei der Inbetriebnahme als auch während des Betriebs
Möglichkeit der Verwendung sowohl absoluter als auch absoluter inkrementeller Positionssensoren
Wählen Sie den Modus des Robotersteuerungssystems aus – Geschwindigkeits- oder Drehmomentsteuerung
Die Sturheit des rosahaarigen Pakets programmatischer Vergessenheit wird leicht durch die gleiche Schlangen-in-der-Stöberhäufigkeit von Virishuvati auf der Yogo-Basis des Techychniil (einschließlich der Puppaysovynnya-Antriebe) zugelassen.
Das Vorhandensein von Motoren mit leerer Welle in der Metronix-Produktlinie ermöglicht das Einschalten des Zwischengeräts – einer geeigneten Kupplung – mithilfe kinematischer Diagramme
Durch programmierte Ausgänge können Anlagen in unterschiedlichen Notfallsituationen mit hohem Schutzniveau und maximalem Informationsgehalt für den Bediener betrieben werden
Bei der VS-Serie handelt es sich um einen Standardzünder, der die Steuerung von Geschwindigkeit, Drehmoment (±10 V) und Position (Schritt/Richtung) implementiert.
Umwandelnde Frequenzen der VS-Serie können in den folgenden Modi verwendet werden:
Ändern der Position mithilfe eines externen Controllers, der die Impulsfolge festlegt.
Bietet Hochgeschwindigkeitsbetrieb an analogen Eingängen oder diskreten Eingängen.
Drehmomentsteuerung des Analogeingangs im maximalen Drehmomentaustauschmodus.
Keruvannya swidkіst/position.
keruvannya mit Geschwindigkeit/Moment.
keruvannya Position/Moment.
Für besondere Aufgaben ist die spezielle VP-Serie gedacht:
Lineare Koordinatenpositionierung mit einer Auswahl von bis zu 64 Positionen, sechs diskreten Eingängen (VP1), typischer Anwendungsbereich – Gewährleistung linearer Bewegung in Systemen mit einer Übertragung auf eine Kugelumlaufspindel
aktuelle Positionierung mit der Möglichkeit, bis zu 32 Positionen auszuwählen, fünf diskrete Eingänge (VP2), typische Lagerbereiche – Drehtische, rotierende Förderbänder, automatische Werkzeugwechselvorrichtungen usw.
Positionierung mit variablem Vorschub (VP3), typischer Anwendungsbereich – Verpackungsmaschinen, alle Arten von Geräten, die sowohl durch das Signal des Encoders an der Motorwelle als auch durch das Vorzeichen eines externen diskreten Sensors mit der Positionierung versorgt werden
Programmierbare Positionierung mit der Möglichkeit, bis zu 8 Programme mit drei diskreten Eingängen (VP5) auszuwählen, jedes Programm kann bis zu 100 Positionen (Positionen) haben, die im Frequenzumkehrspeicher gespeichert werden
Um die Frequenzumwandlung VS und einen Personalcomputer (Industriecomputer) zu verbinden, wird ein COM-Port verwendet; bei Bedarf können die Umwandlungsfrequenzen über einen RS232/RS485-Konverter kombiniert werden
Integrationen Servoantrieb
align="RIGHT" width="30%" border="0">Das Hauptgemüse Reis, sowie das wichtigste Produkt, integriert Servoantriebє Motor, Regler, Torsensor und Frequenzumschalter in einem Gehäuse. Durch die Reduzierung der Installationsvorgänge auf ein Minimum werden Anschluss und Einrichtung vereinfacht, die Arbeitszeit verkürzt, erheblich Platz gespart und sich auch positiv auf die Produktivität ausgewirkt. Servoantrieb.
Auf dem russischen Markt ist es ihnen bereits gelungen, sich freundlich zu zeigen und die inländische Integration der Russischen Föderation zu empfehlen. Servo SPS.
Zeitlose (Vektor-)Steuerung basierend auf einem für Zeitmaschinen angepassten Algorithmus
Hohe dynamische Leistung für die Durchflussmenge geschlossener Kreisläufe zur Regulierung der Durchflussmengen in den Motorwicklungen
Vikoristana geschlossener Fluidkreisläufe
geringe Vibration für den Zusilla-Rahmen, der dynamisch angepasst wird
Durchdachtes Design und einfache Installation
kompakte Größe und geringes Gewicht
Robotermodi Servoantrieb SPS
Dynamisch – das Signal vom übergeordneten Controller wird in Echtzeit über eine digitale Schnittstelle übertragen. Der dynamische Modus wird in Systemen verwendet, die eine Konturausrichtung erfordern (z. B. Manipulatoren mit Faltkinematik und Koordinatentischen zur präzisen Positionierung).
Analog – Steuerung mit einem Hochgeschwindigkeitssignal von ±10 V. In diesem Modus können Sie den Antrieb verwenden, um die Steuerung mit analogen Steuerungssystemen aufzurüsten oder ihn manuell zu steuern (z. B. hinter einem zusätzlichen Lenkrad).
Zyklisch – zeigt zyklische Vorgänge an, die von der Steuerung der oberen Ebene programmiert wurden, und Einsparungen im Antriebsspeicher. Dies ermöglicht häufig das Ausschalten des externen Controllers der oberen Ebene des Steuerungssystems. Der zyklische Modus wird beispielsweise an Förderbändern und bei schwierigen Lagerarbeiten eingesetzt.
Marzed – Dieser Modus ermöglicht die Aufteilung des Systems in verschiedene Bereiche des Servosystems basierend auf der digitalen CAN-Schnittstelle, um synchrone oder sequentielle Bewegungen mehrerer Achsen zu realisieren. In diesem Fall besteht auch die Möglichkeit, den „Master-Slave“-Modus zu nutzen, bei dem der Antrieb in der repetierenden Position der Antriebswelle arbeitet.
Bei der Gestaltung von Alltagsgeräten, die auf Basis von Hochtechnologien entstehen, werden nach und nach verschiedene automatische Prozesse weiterentwickelt und perfektioniert. Darunter befindet sich ein Breitband-Servoantrieb, der im Zusammenspiel mit benachbarten Elementen und Teilen konstanter dynamischer Antriebe installiert wird. Diese Geräte gewährleisten eine ständige Kontrolle über die Drehwinkel der Welle und sorgen für die notwendige Fließfähigkeit elektromechanischer Geräte.
Der Speicherteil dieser Systeme sind Servomotoren, die die Bewegung von Flüssigkeiten im erforderlichen Bereich zu bestimmten Zeiten ermöglichen. Somit können alle Vorgänge und Prozesse periodisch wiederholt werden, wobei die Häufigkeit dieser Wiederholungen im Steuerungssystem festgelegt ist.
Anbau an Servoantrieb
Die Hauptbestandteile eines typischen Servomotors sind der Rotor und der Stator. Zum Schalten werden spezielle Komponenten in Form von Steckern und Klemmenkästen eingebaut. Die Steuerung, Steuerung und Korrektur der Prozesse erfolgt mit Hilfe eines nahegelegenen Kernknotens. Um den Servoantrieb zu verstärken und zu dämpfen, wird das System vikorisiert. Alle Teile befinden sich im Gehäuse.
Fast alle Servos verfügen über einen Sensor, der wichtige Parameter wie Position, Stärke oder Wickelgeschwindigkeit verarbeitet und überwacht. Die zusätzliche Heizeinheit unterstützt den automatischen Modus der erforderlichen Parameter beim Betrieb des Geräts. Die Wahl des einen oder anderen Parameters erfolgt in Abhängigkeit von den Signalen, die im Abstand von einer Stunde vom Sensor kommen.
Der Unterschied zwischen dem Servoantrieb und dem primären Elektromotor hängt von der Fähigkeit ab, die Welle in einer genau festgelegten Position zu installieren, die in Grad gemessen wird. Die eingestellte Position sowie weitere Parameter werden von der Steuereinheit unterstützt.
Ihr Funktionsprinzip basiert auf der Umwandlung elektrischer Energie in mechanische Energie mithilfe eines zusätzlichen Elektromotors. Als Antrieb kommt ein Getriebe zum Einsatz, mit dem die Wickelflüssigkeit auf den erforderlichen Wert reduziert werden kann. Wellen mit Zahnrädern dringen in das Lager ein und übertragen Drehmoment.
Wie funktioniert ein Servoantrieb?
Für den Start des Elektromotors ist die Umschlingung der Abtriebswelle des Getriebes verantwortlich, die über Zahnräder mit dem Servoantrieb verbunden ist. Das Getriebe selbst erfordert eine Regulierung der Anzahl der Windungen. Die Abtriebswelle kann mit Mechanismen und Geräten verbunden sein, die repariert werden müssen. Die Position der Welle wird durch einen zusätzlichen Abschaltsensor gesteuert, der elektrische Signale rund um die Drehung umwandelt und anhand dessen das Funktionsprinzip eines beliebigen Geräts bestimmt wird.

Dieser Spannungssensor wird auch Encoder oder Potentiometer genannt. Wenn Sie den Schieber drehen, ändern sich seine Stützen. Verändern Sie die Halterung so, dass sie sich mit der Drehung des Encoders in einer direkt proportionalen Position befindet. Dieses Funktionsprinzip ermöglicht es Ihnen, Mechanismen in der gewünschten Position zu installieren und zu fixieren.
Zusätzlich enthält der Servomotor eine Elektronikplatine, die externe Signale in Form eines Potentiometers erzeugt. Anschließend werden die Parameter angepasst, deren Ergebnisse mit dem Start des Elektromotors einhergehen. Außerdem ist die Verwendung elektronischer Zahlungen mit einer negativen Strafe verbunden.

Sie können den Servomotor über drei zusätzliche Leiter anschließen. Zwei davon versorgen den Elektromotor mit Leben, der dritte dient der Übertragung von Steuersignalen, um die Welle in die gewünschte Position zu bringen.
Mit Hilfe einer sanften Beschleunigung oder einer ebenso sanften Verzinkung ist es möglich, den übernatürlichen Staudruck auf den Elektromotor zu vermeiden. Deshalb werden faltbare Mikrocontroller eingesetzt, um eine präzisere Steuerung und Positionskontrolle des Arbeitselements zu gewährleisten. Sie können beispielsweise die Festplatte des Computers ausrichten, wo die Köpfe mithilfe eines zusätzlichen Präzisionsantriebs in der gewünschten Position installiert werden.
Servomotorsteuerung
Der Hauptgrund für den normalen Betrieb des Servomotors liegt darin, dass er vollständig mit dem sogenannten G-Code-System funktioniert. Bei diesen Codes handelt es sich um eine Reihe von Steuerbefehlen und Einstellungen für ein spezielles Programm.
Wenn wir CNC als numerische Steuerung betrachten, dann interagieren in diesem Fall die Servos mit. Es ist notwendig, die Spannungswerte an der Alarmwicklung bzw. dem Anker des Elektromotors auf das Niveau der Eingangsspannung zu ändern.

Direkte Steuerung des Servomotors und das System arbeitet von einem Ort aus – der Steuereinheit. Wenn ein Befehl zum Bewegen der Spur entlang der X-Koordinatenachse ausgegeben wird, erscheint im digitalen Analogschalter eine Spannung des Spurwerts, die benötigt wird, um den Antrieb mit dieser Koordinate zu versorgen. Der Servomotor beginnt mit einem Außenrotor der Laufspindel, der mit dem Encoder und dem Knopf des Hauptmechanismus verbunden ist.
Impulse werden in den Encoder vibriert, der von dem Block unterstützt wird, der den Servoantrieb steuert. Das Programm enthält verschiedene Signale des in der Station installierten Encoders, die den Endmechanismus passieren können. Zur erforderlichen Stunde übernimmt der Analogwandler nach Ablehnung der eingestellten Impulsstärke die Ausgangsspannung, wodurch der Stellmotor komprimiert wird. Kurz vor dem Einströmen der Impulse wird also die Spannung erneuert und der Betrieb des gesamten Systems erneuert.
Sehen Sie sich die Eigenschaften an
Servomotoren sind in verschiedenen Ausführungen erhältlich und können somit in den unterschiedlichsten Bereichen eingesetzt werden. Die Hauptbauwerke sind in einen Sammler gegliedert und für den Betrieb als Dauer- und Wechselstrom ausgelegt.
Darüber hinaus kann der Servomotor synchron oder asynchron sein. Synchrongeräte können die Wickelgeschwindigkeit sowie die Windungsgeschwindigkeit und Beschleunigung hochpräzise einstellen. Diese Antriebe erhöhen schnell die Nenngeschwindigkeit des Wicklers. Servoantriebe in einer asynchronen Schaltung werden gesteuert, indem die Parameter der Schaltung geändert werden, wenn ihre Frequenz durch einen zusätzlichen Wechselrichter geändert wird. Sie verglasen mit hoher Präzision die vorgegebene Fließfähigkeit des Windes für die niedrigsten Deckblätter.

Je nach Prinzip und Ausführung können Servoantriebe entweder elektromechanisch oder elektrohydromechanisch sein. Die erste Option, die ein Getriebe und einen Motor umfasst, hat eine niedrige Geschwindigkeit. In einem anderen Fall ist die Wirkung sogar stärker als der Kolben im Zylinder.
Der Servoantrieb zeichnet sich durch folgende Parameter aus:
- Das Drehmoment oder Zusilla, das an der Welle auftritt. Wird als wichtigster Indikator für den Roboter-Servoantrieb angesehen. Für den Hautspannungswert wird das Kraftmoment zur Drehung verwendet, das im Pass des Virus angezeigt wird.
- Flexibilität beim Wenden. Dieser Parameter stellt den Zeitraum dar, in dem die Position der Abtriebswelle auf 600 geändert werden muss. Diese Eigenschaft hängt auch vom spezifischen Spannungswert ab.
- Der maximale Drehwinkel, den die Abtriebswelle drehen kann. Am häufigsten liegt dieser Wert bei 180 oder 3600.
- Alle Servos sind in digitale und analoge unterteilt. Eng damit verbunden ist die Servoantriebssteuerung.
- Lebensdauer von Servomotoren. Die meisten Modelle haben Spannungen zwischen 4,8 und 7,2 V. Das Leben und Management erfolgt mit Hilfe von drei Führern.
- Möglichkeit der Aufrüstung auf einen permanenten Wickelservoantrieb.
- Die Materialien für das Getriebe können variieren. Zahnräder bestehen aus Metall, Kohlenstoff, Kunststoff oder Verbundwerkstoffen. Jeder von ihnen hat seine eigenen Erfolge und Mängel. Kunststoffteile sind beispielsweise stoßfest, aber bei regelmäßiger Nutzung verschleißfest. Metallgetriebe nutzen sich jedoch schnell ab, dann entwickelt der Geruch einen hohen Widerstand gegen dynamische Intensität.
Vor- und Nachteile von Servomotoren
Aufgrund ihrer einheitlichen Abmessungen können diese Geräte einfach und unkompliziert in jede Struktur eingebaut werden. Der Geruch ist leise und zuverlässig, die Haut von ihnen arbeitet praktisch geräuschlos, was beim Einsatz auf Falt- und ähnlichen Parzellen von großer Bedeutung ist. Mit niedrigen Geschwindigkeiten erreichen Sie Präzision und sanfte Bewegungen. Der Servoantrieb kann je nach Vorgaben vom Personal eingestellt werden.
Als Defizite werden die Komplexität des Songs bei der Anpassung und die ebenso hohe Abwechslung angedeutet.