Серво задвижване - какво е това? Как да направите и свържете серво задвижването със собствените си ръце? Какво прави сервомоторът и как работи? Електрически сервомотори.
Връзката на портата се задвижва от серво задвижване или се „забива с болтове“
- Блог на компанията Amperka
Здравейте на всички хабраконструктори!
Хрумна ми една необмислена мисъл: вземете устройство, което може да се използва за забиване на болт. Само за демонстрация на серво задвижването на робота. Алгоритъмът е прост: даваме команда за повдигане на чука, проверяваме, докато се издигне, и освобождаваме чука; И така до заколването на цветята. Как можете да разберете дали чукът се движи или е запушен, без да повредите допълнителните сензори? Включете „лошото“ серво задвижване! Как да печелите пари сами можете да намерите в статистиката.
Какво е серво задвижване? Накратко, знаете всичко, но за всеки проблем: това е причината, поради която при смяна на стационарен двигател потокът не просто се върти, докато се подава напрежение, а вместо това се обръща към дадена точка и се установява в тази позиция. Веригата е инсталирана зад допълнителен PWM сигнал. Серво задвижването на ядосания лагер също е виновно за познаването на силата му. Преди да започна с кочана, започнах да вярвам, че би било по-просто и по-ефективно да захранвам текущата реколта извън кутията. Не така. Нека поговорим за всичко по ред.
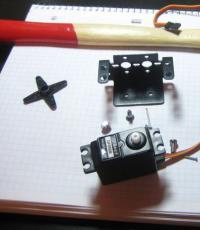
Е, аксесоар за гадаене: серво задвижване с прикрепен към него чук върху малък пиедестал за подравняване. Серво задвижването е свързано към Arduino чрез IO Shield, а микроконтролерът конфигурира алгоритъма:
- Монтирайте серво задвижването за повдигане на чука
- Не действайте, докато серво задвижването не ви каже какво е постигнато
- Включете серво задвижването и оставете чука да падне върху ръцете
- Прочетете текста в правилната позиция, какво е паднало
- Ако нишката не се е променила след падане няколко пъти, това означава, че нишката е спряла да се запушва. Явно виното е задръстено - предполага се
- След като всичко се промени, започваме отначало

Рязане и валцуване:

Нека започнем да пишем фърмуер за Arduino. Става ясно, че инсталирането на пеещ кут за сервиране не е проблем. Zocrema, която ви позволява да създадете стандартна серво библиотека, която формира изходен PWM сигнал от стойността, зададена в градуси. И основният проблем за читателите е: няма функции за това.
Швидко, след като потърси проблема в Google, намери много информация във форумите, където авторитетно потвърди: Това е невъзможно! Серво задвижванията са устройства само за запис. Това не ме притесняваше, интуитивно чувствах, че е възможно да се постигнат тези данни.
Матчасина
След някои скорошни шеги по ръба можете да разберете как сървърът контролира. Това е основният двигател с постоянен поток, който е свързан към изходния шпиндел чрез шина от зъбни колела, които образуват долната предавка. Същият този шпиндел отвътре е физически прикрепен към потенциометъра (резистор за настройка). Когато двигателят е включен, шпинделът се върти, плъзгачът на потенциометъра се върти, изходното напрежение на потенциометъра се променя, напрежението на потенциометъра се отчита и напрежението е достигнало определеното ниво - стойността е достигната, двигателят се върти на Id на живота.След това с помощта на потенциометър можете да определите текущото прекъсване зад сигнала. Вече не беше възможно да се включи серво задвижването и да се свърже с желаното място. Нека да разгледаме:

Веднага ще ви кажа, че безвъзвратно счупих серво задвижването от снимката по време на процеса на анализ. Нямаше нужда да премахвате платката с електрониката, просто махнете задния капак, който пасва на 4 винта. Не беше веднага очевидно и за да разберем къде се намира потенциометърът на запоената платка, трябваше да пожертваме едно устройство.
Ос като запоен потенциометър на серво в DFRobot:

Имаме нужда от сигнал от плъзгача, който се променя между минималното и максималното напрежение при завъртане. Взимаме мултиметър, завъртаме шпиндела и виждаме: кои вериги показват кой сигнал. За моята услуга напрежение от 0,43 съответства на завъртане на 0°, а напрежение от 2,56 V съответства на максимално завъртане от 180°.
Внимателно запоете новия сигнален проводник.

Свързваме го към аналоговия вход A5 на Arduino. Затваряме капака. Пишем програмата:
#включи
Включете го, опитайте го, опитайте го!
С какво да работите, без допълнително обожание, има много опции: можете да създадете контролер въз основа на това, което се използва на корабите за задаване на тяга (назад/назад); възможно е да се използва сервото с връзката на вратата като елемент от автономното управление на кермата на всяка машина; много неща са възможни. Нека вашата фантазия дойде с нас!
Серво задвижване(lat.servus - слуга, помощник; донесе, какво да зашие)- Карайте от Керуван презотрицателно обратно извикване , което ви позволява точно да зададете параметрите на roc.
Серво задвижването се използва най-често в роботиката. Невъзможно е без него, особено когато става дума за високо ниво на прецизност на движение на предмети и предмети. Този проблем възниква с течение на времето с унищожаването на всякакъв вид механична работа (приготвяне, варене, смилане, движение на продукти по конвейер и др.). Такива роботи трябва да имат манипулатори, които приличат на механични ръце. Пред манипулаторите ни се представя Vlasna, известната индустриална роботика, която се използва за автоматизиране на производството по целия свят. И нито един такъв манипулатор не може без серво задвижвания, които са свързани помежду си. Защо?
Всичко отдясно се управлява от серво задвижването. Серво задвижването е задвижване, при което се създава връзка с отрицателна обратна връзка, която позволява прецизно управление на параметрите на задвижващия вал (най-често изходящия вал). За да създадете такава порта, трябва да използвате сензора за положение на изходния фенер на серво задвижването или също могат да бъдат свързани сензорите за течливост, сензорите за шум и т.н., изглежда, че виси или се върти в песента на позицията. Тази позиция се инсталира и „проверява“, докато се намери команда за промяна на позицията. Например, изпраща се сигнал, че валът е монтиран в ъглова позиция от 90 градуса. Валът се върти в своята позиция и тримира, докато пристигне сигнал за нова позиция. Подобни възможности сериозно засягат серво задвижването на двигателя на първичната предавка, който не може да се върти непрекъснато, докато към него е приложено напрежение. В резултат на това, ако един робот е оборудван с такива задвижвания, той може да се срути като човешка ръка и да унищожи робота, който може да бъде унищожен.
В индустрията има много различни видове серво задвижвания. В тази статия разглеждаме електрическите серво задвижвания в общата индустрия. Казано по-просто, такива сервомотори имат вал, който се увива около тях. За простота ще разгледаме устройството на хоби-серво задвижването SG-90 (фиг. 1), което се използва активно за създаването на първоначални модели на роботи и други механизми, които летят или летят. Хоби-серво задвижването, за разлика от индустриалното, е с по-малки размери, развива по-малко сила, иначе е защитено и принципно е абсолютно идентично с индустриалния си аналог.
Малюнок 1
Устройството за hobi-servo задвижването е показано на малко 2. Този склад включва електродвигател, скоростна кутия с набор от предавки, потенциометър (който променя функцията на датчика за положение за обратната връзка), електронна контролна платка за електродвигателя и корпус, който побира целия капацитет На какви малки индикации се ориентирате, с какъв вид серво задвижване трябва да живеете и да следвате? Състои се от 3 проводника: проводник „плюс“, проводник „минус“ и проводник, който изпраща сигнала, който го управлява. При различните модели серво котлони, стреличките могат да имат различни цветове. Практично е първо да изпълните „плюс“ живота на червените цветове и да изпълните „минус“ живота на черните. Няма ясни цветови стандарти за сигналната стрела (за предаване на цветния сигнал). За някои серво задвижвания сигналният проводник може да е бял, оранжев или кафяв.

Малюнок 2
За keruvannya такива двигатели са приели стандарта за keruyuchy сигнал. Състои се от постоянно повтарящи се импулси и, както казваме, ниски импулси (фиг. 3). Честотата на тези импулси постепенно става постоянна и достига 50 Hz. Излез, колко е часът?импулси (час между водещите ръбове на импулсите на съда), зададени на 1s/50 = 0,02 секунди, след това 20 милисекунди.

Малюнок 3
Важното е, че позицията на изходния вал на серво задвижването се определя от силата на импулса, който се доставя. За пояснение малката 4 показва приблизителната връзка между ширината на импулса в часовникови координати и посоката на въртене на вала на серво задвижването. Контролът на въртенето на серво задвижващия вал е обект на допълнителни импулси с честота от 1 до 2 ms (милисекунди).

Малюнок 4
Както може да се види от графиката, за управление на серво задвижването не се използва нищо повече от сигнал от модулация на ширината на импулса - PWM. Можете да разберете какво представлява тази ШИМ от следните статистики на нашия уебсайт.
И как ширината на импулса се трансформира в изходящия вал?
Както е присвоено на бебе 2, корпусът на серво задвижването има друг електронен модул за управление на мотора. Сигналът, изпратен към серво задвижването, се губи на платката. И оста, която се генерира от този сигнал, е допълнително показана в блоковата диаграма на бебе 5, която анализираме стъпка по стъпка. Кожният етап се изобразява с ректум или кръг и се номерира. В средата на тези директни кожни изображения са устройствата, в които се обработва сигналът.

Малюнок 5
Също така, входният контролен сигнал SP с PWM модулация пристига в специална микросхема с логически елементи, която след това се преобразува в напрежение Upr (етап № 1). След този сигнал Ucontrol (напрежение на ядрото) се намира елементът за изравняване на напрежението. Този елемент се нарича суматор, но всъщност от входния сигнал Ucontrol произвежда напрежение Urev (възвратно напрежение), което преминава през обратната връзка от обменния резистор (стъпка № 2).
Излязлото напрежение Ucorr (коригируемо напрежение) се задейства принудително от бустера (стъпка № 3) и се подава към електродвигателя. Моторът се завърта (стъпка № 4) и задвижва изходящия вал към серво задвижването, а в същото време и сензора за въртене под формата на потенциометър. При завъртане на дръжката на потенциометъра напрежението се променя и излиза, така че въртенето на вала се променя на напрежение Urev (стъпка № 5). Това напрежение U ще бъде изравнено (стъпка № 2) с напрежението Uконтрол и разликата ще се появи веднага щом се върнем към бустера (Стъпка № 3) и т.н. Сигналът е да „вървите“ с ланцета от яката до часа, когато връзката приключи Ucontrol = Urev. Тогава ускорението става равно на 0 и двигателят започва да забавя. Това ще се случи, ако серво валът е в позиция, която съответства на входния сигнал, който управлява Super.
Нека поставим всичко в перспектива. Серво задвижващият вал е механично свързан с дръжката на потенциометъра. Едновременно с въртенето на серво задвижването се върти и потенциометъра, в резултат на което се променя лагерът му и изходното напрежение Urev. Очевидно изходното напрежение от потенциометъра е директно разположено в точката, където серво задвижването се върти. В същото време входният серво задвижващ сигнал Ucontrol с тривалност на импулсите от 0,001 до 0,002 секунди задава нивото на напрежение Ucontrol, което показва колко трябва да се върти валът на серво задвижването. Рамото на електродвигателя, в момента, в който самият серво задвижващ вал е в желаната позиция, достига рамото за сигнал Ucontrol сигнала на мигача Uобраз. И бустерът за етап № 3 е необходим, за да се подаде силно напрежение към електродвигателя и двигателят да премести вала към серво задвижването в определеното положение възможно най-бързо.
Приложете серво мотора
Както беше казано по-горе, за да управлявате сервомотора, трябва да използвате параметрите на ШИМ. Такава ШИМ може да се генерира по различни начини. Нека им покажем какво правят.
1. Управление на сервомотора с помощта на допълнителен таймер 555 . Таймерният чип 555 може да работи в режим на генератор на импулси (за доклад относно този чип, прочетете придружаващата статия). След това е възможно да изберете такива параметри за работата на тези микросхеми, така че да се генерират необходимите им импулси. Чрез промяна на скоростта на тези импулси, т.е. чрез промяна на скоростта на импулсите от 0,001 до 0,002 секунди, ние ще зададем скоростта на въртене на серво задвижващия вал.
За да се реализира ШИМ сигнал, е необходимо да се създаде верига с регулирано разстояние между импулсите при постоянна честота от 50 Hz. Параметрите на компонентите в диаграмата (фиг. 6) са подбрани така, че да осигурят безопасност. Ако сигналът на керубана трябва да задоволи всички умове, той трябва да бъде обърнат. Транзисторът във веригата е абсолютно необходим. За да определите температурата в посочените диапазони, ще ви е необходим потенциометър с максимална поддръжка от 20 kOhm. Ще използваме два потенциометъра по 10 kOhm всеки (същите потенциометри се използват в основния комплект на Evolvector от 1-во ниво, тази схема е описана подробно. Работната скорост на сервомотора е настроена на 180 градуса, а дръжките на единия потенциометър на серво задвижването ще се върти на градуса, а за допълнително увиване на другия - на още 90 градуса.

Малюнок 6
По-добре е да прочетете тази диаграма и можете да я вземете, като закупите основния комплект на еволвектор от 1-во ниво.
2. Управление на сервомотора с помощта на контролер. З Също така е възможно генерирането на необходимия ШИМ сигнал с помощта на допълнителен контролер. Например, можете да програмирате контролера на платформата Arduino. За да опростите програмирането на алгоритъма за управление на сервомотора (генериране на ШИМ), доколкото е възможно, започнете да пишете програми, наречени библиотеки. Нашият сгъваем програмен код, който се получава от кореспондента, се превежда във функциите, от които се нуждаем, с помощта на кратки команди при свързване на библиотеката към нашата основна програма. От алгоритмична гледна точка управлението на такива устройства като серво мотори е изключително просто и ръчно.
Схема на свързване, както иСкица (програма) за сервомоторния контролер Arduino показва малко 7.
Малюнок 7
ПРЕДУПРЕЖДЕНИЕ: Свързването на сервомотора към плочата е в средата, като в задната част (Фигура 7), не е необходимо. За нашия малък брой връзки имаме един сервомотор в категорията „минус“, който се справя дори с малки потоци, през които редовно работим, захранвайки директно на платката. Серво задвижването със стандартен размер изисква по-голяма сила, което може да причини прегряване и повреда на контролера. Връзките към живота на двигателите трябва да се правят само чрез поредица от задвижващи механизми, особено когато мощността се прехвърля едновременно към сервосистеми.
#включи<Серво.h>- Тази команда означава свързване на библиотеката за управление на серво задвижване. Тази библиотека е на диска Evolvector, който се доставя заедно с нашите комплекти от други нива. Можете също така да ги намерите в Интернет и да ги поставите в папката „библиотеки“ на вашата Arduino IDE.
Свързаната библиотека съдържа голям брой команди, ще разгледаме само тези, които се използват в програмата.
Серво двигател; - това е промяна от особен тип. двигател- това е променливо (името е избрано достатъчно). Серво- този тип промяна (специален тип, който е посочен в придобитата библиотека). Можете да инсталирате до 12 сменяеми типа за управление на 12 серво. С други думи, с тази команда информирахме платката, че имаме серво задвижване, което извикахме двигател.
dvig.attach(9);- Тази команда означава, че серво задвижването ( двигател) добавете до 9 pinu (visnovku).
dvig.write (90); - тази команда променя серво задвижването ( двигател) завъртете в средно положение (90 градуса).
двигател.напиши(0); - Завърта серво задвижването на позиция 0 градуса.
dvig.write (180); - Завърта серво задвижването на позиция от 180 градуса.
Можете да разберете какво означават редовете на програмата на страниците на нашия уебсайт или да разберете от основните служители как да влезете в склада
Тази статия обхваща серво задвижвания: техните устройства, функции, връзки на серво задвижвания, връзки на серво задвижвания, видове серво задвижвания и тяхното подравняване. Нека да започнем и да разберем какво е серво задвижване.
Разберете серво задвижването
Под серво задвижване най-често се разбира механизъм с електродвигател, който може да бъде помолен да се върти в определена посока и да се настрои в тази позиция. Това обаче не е напълно извън смисъла.
Казано направо, серво задвижването се задвижва чрез връзка с отрицателен контрол, което ви позволява да контролирате точно параметрите на волана. Серво задвижването е вид механично задвижване, което съдържа сензор (позиция, течливост, сила и т.н.) в склада и блок за управление на задвижването, който автоматично настройва необходимите параметри на сензора и устройството според външната настройка. Техните значения .
С други думи:
Сервозадвижването получава като вход стойността на параметъра, който контролира. Например зад ъгъла
Нагревателят е равен на стойностите на неговия сензор
Въз основа на резултата от настройката се извършва действие, например: завъртане, ускоряване или увеличаване, така че стойността на вътрешния сензор да се доближи до стойността на външния параметър, който контролира
Сервомашините са изключително широки, което намалява броя на задачите и сервомашините, които поддържат зададената скорост на обвиване.
Типично хоби-серво задвижване е показано по-долу.
Как се управляват сервосистемите?
Прикрепване към серво задвижване
Серво задвижванията носят куп части за съхранение.

Задвижване – електродвигател с редуктор. За да преобразувате електричеството в механично въртене, което е необходимо електрически мотор. Най-често обаче течливостта на двигателя е твърде голяма за практичен двигател. За да намалите ликвидността, използвайте vikoryst скоростна кутия: механизъм със зъбни колела, който предава и трансформира въртящия момент.
Като включите електродвигателя, можете да навиете изходящия вал - крайната предавка на серво задвижването, към която можете да закачите каквото искате. Необходима е защита, така че позицията да се контролира от устройството датчик за мигачи - енкодер, който ще направи обратен завой при електрически сигнал. За тази цел често се използва потенциометър. При завъртане на плъзгача на потенциометъра опората се променя пропорционално на въртенето. По този начин, с тази допълнителна помощ, можете да инсталирате резбонарезна фреза за механизма.
Между електродвигателя, скоростната кутия и потенциометъра в серво задвижването има електронно пълнене, което индикира получаването на нов параметър, отчетената стойност от потенциометъра, тяхното центриране и включване/изключване на двигателя. Вон е отговорен за поддържането на негативната конюнктура.
Необходими са три стрели, за да стигнете до сервото. Два от тях показват живота на двигателя, третият доставя сигнал, който управлява, който се използва за задаване на позицията на устройството.
Сега нека видим как да управляваме серво задвижването.
Управление на серво задвижване. Интерфейс на керамични сигнали
За да кажете на серво задвижването неговата позиция, трябва да изпратите сигнал за каква цел. Сигнал за втвърдяване - импулси с постоянна честота и променлива ширина.

Тези, в които позицията може да заеме серво задвижването, трябва да останат при наличие на до два импулса. Когато сигнал достигне управляващата го верига, разположеният в нея генератор на импулси вибрира импулса си, чийто интензитет се указва чрез потенциометър. Другата част от веригата е равна на интензитета на двата импулса. Веднага щом възникне повредата, електродвигателят започва да работи. Директно обвивката се показва от това кой от импулсите е къс. Веднага щом импулсите станат по-силни, електрическият мотор започва да се забавя.
Най-често в хоби сървърите импулсите вибрират с честота 50 Hz. Това означава, че импулсът се предава и получава веднъж на всеки 20 ms. Ако импулсният импулс е 1520 µs, това означава, че серво задвижването е принудено да заеме средно положение. Увеличаването или промяната в импулса ще накара серво задвижването да се върти зад стрелката или срещу стрелката по подобен начин. В този случай има горна и долна граница между импулса. Servo библиотеката за Arduino има следните стойности за импулсния импулс: 544 µs – за 0° и 2400 µs – за 180°.
Моля, обърнете внимание, че на вашето конкретно устройство фабричните настройки може да изглеждат заменени от стандартните. Серво задвижванията осигуряват ширина на импулса от 760 µs. Средната позиция е 760 µs, същата като при конвенционалните сервосистеми средната позиция е 1520 µs.
Това също означава, че е повече от просто взето преди. Въпреки това, в рамките на същия модел, серво задвижването може да има дефект, който е разрешен по време на вибрации, което води до факта, че работният обхват на импулсите е леко намален. За прецизна работа на кожата може да се калибрира специфично серво задвижване: чрез експериментиране е необходимо да се избере правилната характеристика на диапазона за него.
Ако наистина искате да загубите уважението си, тогава си струва в терминологията. Често методът за управление на сервоприводите се нарича PWM/PWM (модулация на ширината на импулса) или PPM (модулация на импулсната позиция). Това не е така и използването на тези методи може да повреди устройството. Правилният термин е PDM (модулация на продължителността на импулса). За някои е важна продължителността на импулсите, а честотата на тяхното появяване не е толкова важна. 50 Hz не е норма, но серво задвижването работи правилно както при 40, така и при 60 Hz. Единственото нещо, което е необходимо за всяка майка е, че при силна промяна в честотата на вените те могат да извършат потрепвания и с намаляване на напрежението, а при силна честота (например 100 Hz) могат да прегреят и да се откажат добре.
Характеристики на серво задвижванията
Сега нека да разберем какво представляват сервосистемите и какви са техните характеристики.
Въртящ момент и скорост на въртене
Нека поговорим сега за две много важни характеристики на серво задвижването: въртящ моменти около скорост на завъртане.
Моментът на сила или моментът на въртене е векторна физическа величина, която е традиционното добавяне на радиус-вектора, начертан от оста на въртене към точката на отчетената сила, към вектора на силата. Характеризира външното действие на сила върху твърдо тяло.

По-просто казано, тази характеристика показва колко е важно серво задвижването да остане спокойно в даден ден. Тъй като въртящият момент за въртене на серво задвижването е повече от 5 kg × cm, това означава, че серво задвижването се притиска върху вазата в хоризонтално положение до 1 cm, а 5 kg се окачват на другия край. Или, еквивалентно, важно е да добавите 5 см към 1 кг.
Скоростта на серво задвижването варира в часовия интервал, необходим на серво задвижването да се завърти на 60°. Характеристиката 0,1 s/60° означава, че сервото се завърта на 60° за 0,1 s. Трудно е да се изчисли скоростта на по-голяма стойност, rpm, но се е случило, че при описване на сервосистеми най-често се използва тази единица.
Моля, имайте предвид, че понякога трябва да направите компромис между тези две характеристики, тъй като ако искате надеждно серво задвижване, което може да види много мощност, тогава трябва да сме подготвени, така че инсталацията да може да се върти напълно. И ако искаме много силен драйв, ще бъде много лесно да го премахнем от позицията на равенството. Когато същият двигател се върти, балансът се определя от конфигурацията на зъбните колела в скоростната кутия.
Разбира се, вече можем да използваме устройство, което причинява много болка и главоболие, така че характеристиките му да задоволяват нуждите.
Форм фактор
Серво задвижванията се различават по размер. И въпреки че няма официална класификация, производителите отдавна се опитват да определят колко размера има от често използваното прекрояване на крепежни елементи. Те могат да бъдат разделени на:
малък
стандартен
Вонята се носи със следните характерни размери:
Има също така наречени сервосистеми „специален тип“ с размери, които не отговарят на изискванията за тази класификация, въпреки че броят на такива сервомеханизми е доста малък.
Вътрешен интерфейс
Серво задвижванията са аналогови или цифрови. И така, какви са техните силни страни, предимства и недостатъци?
Звуците не се влияят от нищо: електродвигателите, скоростните кутии и потенциометрите са същите, влияе се само от вътрешната керамична електроника. Вместо специална микросхема за аналогово серво задвижване в цифров близнак, можете да инсталирате микропроцесор на платката, който получава импулси, анализира ги и управлява двигателя. Така физическото лице има по-малко сила в начина, по който импулсите се обработват и обработват от двигателя.

За съжаление, серво задвижването все още получава импулсите, които управлява. След това аналоговото серво задвижване взема решение за промяна на позицията и изпраща сигнал към двигателя, когато е необходимо. Звучи с честота 50 Hz. По този начин задаваме 20 ms – минималният час за реакция. По това време може да се наложи да промените позицията на серво задвижването. Но има само един проблем. Когато електродвигателят е в покой, не се подава напрежение; когато има малко налягане върху електродвигателя, към електродвигателя се изпраща кратък сигнал за ниско напрежение. Колкото повече вдъхновение, толкова по-силен е сигналът. По този начин, с малки входове, серво задвижването не може бързо да завърти двигателя или да развие висок въртящ момент. „Мъртвите зони“ изчезват в рамките на един час.
Този проблем може да бъде причинен от увеличаване на честотата на приемане, обработка на сигнала и работа на електродвигателя. Цифровите серво задвижвания използват специален процесор, който получава управляващи импулси, обработва ги и изпраща сигнали към двигателя с честота от 200 Hz или повече. Оказва се, че цифровото серво задвижване е по-способно да реагира на външни входове, което ни позволява да развием необходимата скорост и въртящ момент за въртене и следователно по-добре да поддържаме дадената позиция, което е добре. Разбира се, в този случай се използва повече електроенергия. Освен това цифровите сервомеханизми са сгъваеми при производството и следователно струват значително повече. Е, само два недостатъка – всички недостатъци, които имат дигиталните сервосистеми. От техническа гледна точка, аналоговите сервомотори могат лесно да надделеят.
Материали за съоръжения
Зъбните колела за сервоприводите се произвеждат от различни материали: пластмаса, въглерод, метал. Всички те са много разнообразни, в зависимост от конкретната задача и какви характеристики са необходими при монтажа.

Пластмасовите, най-често найлонови, зъбни колела са много леки, не са податливи на износване и са по-широки в серво. Миризмите не засягат големите предимства, но тъй като предимствата се пренасят върху малките, тогава найлоновите зъбни колела са най-добрият избор.
Карбоновите зъбни колела са по-издръжливи и практически не се износват в сравнение с найлоновите. Основният недостатък е пътя.
Металните зъбни колела са най-важни, предпазват от миризми и осигуряват максимално внимание. Ако се изморите достатъчно, ще трябва да сменяте скоростите почти всеки сезон. Титановите зъбни колела са фаворит сред металните зъбни колела, както като технически характеристики, така и като цена. За съжаление вонята ще ви струва скъпо.
Колекторни и безчеткови двигатели
Има три типа серво мотори: основен двигател със сърцевина, двигател без сърцевина и безчетков двигател.

Първичният двигател със сърцевина (дясно) има здрав плъзгащ се ротор с фина намотка и магнити около него. Роторът има една секция, така че когато двигателят се върти, роторът вибрира малко трептене на двигателя, докато секцията преминава през магнита, и в резултат на това излиза серво задвижване, което вибрира и е по-малко точно, по-ниско серво задвижване с двигател без сърцевина. Двигател с празен ротор (ляв) задвижва единична магнитна сърцевина с намотка във формата на цилиндър или пръстени около магнит. Дизайнът без сърцевина е лек и няма секции, което води до по-плавна работа и работа без вибрации. Такива двигатели са по-скъпи, но осигуряват по-високо ниво на контрол, въртящ момент и скорост от стандартните.

Наскоро се появиха серво задвижвания с безчеткови двигатели. Предимствата са същите като при другите безчеткови двигатели: няма четки, което означава, че не увреждат опората на обвивката и не се износват, течливостта и въртящият момент са по-високи от тези на безчетковите двигатели. Серво задвижванията с безчетков мотор са най-скъпите сервосистеми, които осигуряват по-добра производителност от сервосистемите с други видове двигатели.
Връзки с Arduino
Много сервоуреди могат да бъдат свързани директно към Arduino. За кой тип е подходящ влак от три стрелички:
червоний - механа; свържете към 5V контакт или директно към спасителната линия
кафява или черна пръст
жълто или бяло – сигнал; се свързва към цифровия изход на Arduino.
За да свържете Arduino, ще бъде лесно да използвате платка за разширение на портове, като Troyka Shield. Ако желаете с няколко допълнителни проводника, можете да свържете сервото чрез макетната платка или директно към контактите на Arduino.
Можете сами да генерирате лазерни импулси, но с по-широк набор от настройки се използва стандартната Servo библиотека за простота.
Механа Обежения
Основното серво задвижване hobi поддържа над 100 mA по време на един час работа. Когато използвате Arduino, можете да видите до 500 mA. Ако трябва да инсталирате стегнато серво задвижване във вашия проект, трябва да помислите дали да го видите във веригата от допълнителен хардуер.
Нека да разгледаме челното свързване на 12V серво задвижване: 
Помислете за броя на свързаните сервосистеми.
На повечето платки на Arduino Servo библиотеката поддържа управление на не повече от 12 серво, на Arduino Mega този брой се увеличава до 48. Има обаче малък страничен ефект от библиотеката: Ако не работите с Arduino Mega, тогава става трудно да се използва функцията analogWrite() на 9 и 10 контакта, независимо от това дали серво задвижването е свързано към някой от контактите. На Arduino Mega можете да свържете до 12 серво, без да нарушавате функционалността на PWM/PWM; ако имате голям брой серво, не можете да използвате analogWrite() на пинове 11 или 12.
Функционалност на Servo библиотеката
Библиотеката Servo ви позволява да програмирате серво задвижвания. За целта сменете на тип серво. Контролът включва следните функции:
attach() - добавя промяна към конкретен пин. Има две опции за синтаксис за тази функция: servo.attach(pin) и servo.attach(pin, min, max). В този случай pin е номерът на щифта, до който ще достигне серво задвижването, min и max са максималният брой импулси в микросекунди, съответстващ на завъртане от 0° и 180°. За почистване стойностите са последователно 544 μs и 2400 μs.
write() - заповядва на серво задвижването да приеме новата стойност на параметъра. Разширен синтаксис: servo.write(angle) , където angle е посоката, в която сервото може да се завърти.
writeMicroseconds() - изпраща команда за изпращане на втори импулс към сервото, което е аналог на ниско ниво на командата за напред. Разширен синтаксис: servo.writeMicroseconds(uS) , където uS е допълнителният импулс в микросекунди.
read() - Чете по-точно стойностите на отделението, в което се намира серво задвижването. Предварителен синтаксис: servo.read() завърта цялата стойност от 0 до 180.
attached() - проверка дали прикачената стойност е променена на конкретен пин. Синтаксис на атаките: servo.attached() , логическата истина се обръща, ако промяната е изядена в най-голяма степен или лъжата е в последната фаза.
detach() - свършете работата, обърнете действието attach() , така че промяната да се направи от щифта, към който е присвоена. Синтаксис за отделяне: servo.detach().
Всички методи в библиотеката Servo2 са базирани на Servo методи.
Задницата на библиотеката Servo
Замяна
Серво задвижванията се предлагат в различни разновидности, някои са по-добри - други са по-евтини, други са по-надеждни - други са по-точни. И преди да закупите серво задвижване, уверете се, че има по-добри характеристики, така че да е подходящо за вашия проект. Успех в начинанията!
Серво задвижване (задвижване за шиене)- Карайте до keruvannyams чрез отрицателна шлюзова връзка, която ви позволява да контролирате точно параметрите на rukhu.
Серво задвижване е всеки тип механично задвижване (устройство, оперативен елемент), което съдържа сензор (позиция, течливост и т.н.) и блок за управление на задвижването (електронна верига или механична тягова система), който автоматично настройва необходимите параметри на сензора ( i Да, на устройството) до определената външна стойност (позиция на копчето за управление или цифрова стойност в други системи).
Материали от Wikipedia - свободната енциклопедия
Серво задвижването е система за задвижване, която в широк диапазон на управление на течливостта осигурява динамични, високопрецизни процеси и осигурява тяхната добра повторяемост. Тази система е проектирана да произвежда въртящ момент, плавност и позиция с определена прецизност и динамика. Класически серво задвижванесе състои от двигател, датчик за положение и система за управление, която има три контролни вериги (позиция, скорост и поток).
Думата "servo" е подобна на латинската дума "servus", която означава слуга, роб, помощник. В машинните помещения беше важно да има допълнителни задвижвания (задвижващи устройства на работни маси, задвижващи роботи и т.н.). Днес обаче ситуацията се промени, сега задвижванията на главата се изпълняват с помощта на серво технология.
в този час, сервоприводиТам има проблем, защото няма достатъчно прецизност в регулирането на първичните промишлени честотни преобразуватели. Застосуване с висока киселинност серво задвижваниянеобходими за високопроизводителна инсталация, където производителността е основният критерий. Серво задвижванияда бъдат оборудвани с прецизни системи за поддържане на плавност и позициониране на промишлени роботи и високопрецизни машини. СервоСъщо така се монтира на стендове за шампоан за сондиране, на различни технологични транспортни системи, на различни спомагателни механизми и др. сервоприводи.
Универсален серво задвижване
Универсален серво задвижванехарактеризиращ се с богат набор от функции, възможност за управление на сервомотори от различни типове (както синхронни, така и асинхронни), възможност за работа с различни сензори на вратата, както и наличието на редица опции и разширения. Привидно универсален Серво задвижванена KEB F5-Multi (Нимеччина) и Control Techniques Unidrive SP. (Англия)
Серво задвижванебазиран на KEB F5-Multi
Серво задвижване KEV" align="RIGHT" width="20%" border="0">Контролер за електрическо задвижване с гейт верига за синхронни и асинхронни двигатели. Специално проектиран за работа в затворен контур, възможни варианти на свързване на контура:
преобразувател
енкодер
Сензор за позиция Sin-Cos
сензор за абсолютна позиция
EnDat, Hiperface или тахогенератор
Основни характеристики и характеристики:
широк диапазон от налягания
напрежение 220 или 380 V
Възможно е да живеете с постоянен поток
безсензорен двигател за керване
галванично изолирани аналогови и цифрови входове/изходи
релета и транзисторни програмирани изходи
Възможно е да се реализира концепцията за децентрализирано отопление със задвижваща система, очевидно:
регулиране на скоростта и въртящия момент
контрол на позицията
тесни режими на опаковане
Cam ремиксери
Електронен камерен диск
Едноосно позициониране
Позиция на въртящата се маса
Всички устройства поддържат най-новите интерфейси Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet и KEB-HSP5/DIN 66019-II.
Vikonavchy и специални Серво задвижване
Крайното серво задвижване работи под контрола на контролера, което позволява избор на функции и настройки, които са лесни за робота. Следователно крайното серво задвижване е по-икономично. Нека да разгледаме Vikonau Сервона дупето на синхрон серво задвижванияМекапион.
Серво задвижване Mecapion

Синхронен Серво Mecapion (ex. Metronix) е основен продукт за системни решения в индустриалната автоматизация, който отдавна е познат на руските работници.
Основните функции серво задвижванияМетроникс
диапазон на налягане от 0,03 до 11 kW
Вграждане на комплект рекуператор, който ви позволява да обръщате енергия и вграждане на ключ за разреждане на енергия при динамично поцинковане
тестов режим на роботизирана настройка на честотата
Функциите за намаляване на вибрациите, когато двигателят е включен и неговата главина ви позволяват да включите робота, като промените честотата в режим colival както по време на пускане в експлоатация, така и по време на работа
Възможност за използване на сензори за абсолютна и абсолютна инкрементална позиция
изберете режима на системата за управление на робота - контрол на скоростта или въртящия момент
Упоритостта на пакета с розови коси на програмна забрава лесно се допуска от същата честота на змия -в -ровене на Virishuvati върху його основата на techychniil (включително puppaysovynnya дисковете)
Наличието на двигатели с празен вал в продуктовата линия Metronix ви позволява да включите междинното устройство - подходящ съединител - с помощта на кинематични диаграми
Програмираните изходи позволяват на системите да работят с високо ниво на защита в случай на различни аварийни ситуации и с максимално информационно съдържание за оператора
Серията VS е стандартен възпламенител, който осъществява управление на скорост, въртящ момент (±10 V) и позиция (стъпка/направление).
Преобразуващите честоти от серията VS могат да се използват в следните режими:
промяна на позицията с помощта на външен контролер, който задава последователността на импулсите.
Осигурява високоскоростна работа на аналогов вход или дискретни входове.
Контрол на въртящия момент на аналоговия вход в режим на обмен на максимален въртящ момент.
Keruvannya swidkіst/позиция.
keruvannya със скорост/момент.
keruvannya позиция/момент.
Специалната серия VP е предназначена за специални задачи:
Линейно-координатно позициониране с избор от до 64 позиции, шест дискретни входа (VP1), типичен обхват на приложение - осигуряване на линейно движение в системи с предаване върху сачмен винт
текущо позициониране с възможност за избор на до 32 позиции, пет дискретни входа (VP2), типични зони за съхранение - ротационни маси, ротационни конвейерни линии, устройства за автоматична смяна на инструменти и др.
позициониране с променливо подаване (VP3), типична област на приложение - пакетиращи машини, всички видове устройства, които се доставят с позициониране както по сигнала от енкодера на вала на двигателя, така и по знака на външен дискретен сензор
Програмируемо позициониране с възможност за избор на до 8 програми с три дискретни входа (VP5), всяка програма може да има до 100 позиции (позиции), които се съхраняват в паметта за обръщане на честотата
За свързване на преобразуването на честоти VS и персонален (индустриален) компютър се използва COM порт; ако е необходимо, чрез конвертор RS232/RS485 честотите на преобразуване могат да се комбинират
Интеграции Серво задвижване
align="RIGHT" width="30%" border="0">Основният зеленчуков ориз, както и най-важният продукт, интегриран серво задвижванее двигател, контролер, сензор за врата и превключвател на честотата в един корпус. Чрез намаляване на инсталационните операции до минимум, това ще опрости свързването и настройката, ще ускори времето, прекарано в работа, значително ще спести място и ще има положителен ефект върху производителността. серво задвижване.
На руския пазар те вече успяха да се покажат любезно и да препоръчат вътрешната интеграция на Руската федерация. Серво SPS.
безвременно (векторно) управление, базирано на алгоритъм, адаптиран за времеви двигатели
висока динамична производителност за дебит на затворени вериги за регулиране на потоци в намотките на двигателя
Използване на затворени контури на течливост
ниска вибрация за рамката zusilla, която се регулира динамично
обмислен дизайн и лесен монтаж
компактен размер и малко тегло
Режими на роботи серво задвижване SPS
Динамичен - сигналът от контролера от най-високо ниво се предава през цифров интерфейс в реално време. Динамичният режим се използва в системи, които изискват подравняване на контура (например манипулатори със сгъваема кинематика и координатни маси за прецизно позициониране).
Аналогово - управление с високоскоростен сигнал от ±10 V. Този режим ви позволява да използвате задвижването, за да надстроите управлението с аналогови системи за управление или да го управлявате ръчно (например зад допълнителен волан).
Циклично - показва цикличните операции, програмирани от контролера на горното ниво и записите в паметта на устройството. Често това ви позволява да изключите външния контролер на горното ниво на системата за управление. Цикличният режим се използва например на конвейери и при неудобни складови операции.
Marzed - този режим позволява системата да бъде разделена на различни подразделения на серво системата на базата на CAN цифровия интерфейс, за да се реализират синхронни или последователни движения на няколко оси. В този случай е възможно също да се използва режимът "master-slave", при който задвижването работи в повтаряща се позиция на задвижващия вал.
В дизайна на ежедневното оборудване, което се създава на базата на високи технологии, постепенно се развиват и усъвършенстват различни автоматични процеси. Сред тях е серво задвижване с широка ширина, което се монтира по метода на взаимодействие със съседни елементи и части на постоянни динамични задвижвания. Тези устройства осигуряват постоянен контрол върху ъглите на въртене на вала и установяват необходимата течливост на устройствата от електромеханичен тип.
Съхраняващата част на тези системи са сервомотори, които позволяват движението на течности в необходимия диапазон в определени моменти. Така всички процеси и процеси могат периодично да се повтарят, като честотата на тези повторения е заложена в системата за управление.
Прикрепване към серво задвижване
Основните части, които изграждат типичен сервомотор, са роторът и статорът. За превключване се монтират специални компоненти под формата на щепсели и клемни кутии. Управлението, контролът и корекцията на процесите се осъществява с помощта на близък основен възел. За укрепване и овлажняване на серво задвижването системата е викоризирана. Всички части са разположени в корпуса.
Почти всички сервоуреди имат сензор, който обработва и следи важни параметри, като позиция, сила или скорост на навиване. Допълнителният нагревател поддържа автоматичен режим на необходимите параметри при работа на устройството. Изборът на един или друг параметър се избира в зависимост от сигналите, които идват от сензора на интервал от един час.
Разликата между серво задвижването и първичния електродвигател зависи от възможността за монтиране на вала в точно определена позиция, която се изразява в градуси. Зададената позиция, както и други параметри, се поддържат от контролния блок.
Принципът им на действие се основава на преобразуването на електрическата енергия в механична, с помощта на допълнителен електродвигател. Като задвижване се използва скоростна кутия, която позволява плавността на намотката да се намали до необходимата стойност. Валове със зъбни колела влизат в склада и предават въртящ момент.
Как работи серво задвижването?
Обвивката на изходящия вал на скоростната кутия, свързана със зъбни колела към серво задвижването, е отговорна за стартирането на електродвигателя. Самата скоростна кутия изисква регулиране на броя на обвивките. Изходният вал може да бъде свързан към механизми и устройства, които изискват ремонт. Позицията на вала се контролира от допълнителен сензор за изключване, който е предназначен да преобразува електрически сигнали около завоя и върху който се определя принципът на работа на всяко устройство.

Този сензор за напрежение се нарича още енкодер или потенциометър. Когато завъртите плъзгача, неговите опори ще се променят. Променете опората да бъде в правопропорционална позиция със завъртането на енкодера. Този принцип на работа ви позволява да инсталирате и фиксирате механизми в желаната позиция.
Освен това сервомоторът съдържа електронна платка, която генерира външни сигнали под формата на потенциометър. След това се настройват параметрите, резултатите от които са последвани от стартирането на електродвигателя. Освен това има отрицателна санкция, свързана с използването на електронно плащане.

Можете да свържете серво мотора с три допълнителни проводника. Два от тях осигуряват живот на електродвигателя, а третият се използва за предаване на управляващи сигнали за задвижване на вала в желаната позиция.
Възможно е да се избегне свръхестественият динамичен натиск върху електродвигателя с помощта на плавно ускорение или също толкова плавно поцинковане. Ето защо се използват сгъваеми микроконтролери за по-прецизно управление и позициониране на работния елемент. Например, можете да насочите твърдия диск на компютъра, където главите са инсталирани в желаната позиция с помощта на допълнителен прецизен диск.
Сервомоторно управление
Основната причина сервомоторът да работи нормално се крие във функционирането му изцяло с така наречената G-code система. Тези кодове са набор от контролни команди и настройки за специална програма.
Като пример за цифрово управление с ЦПУ, в този случай сервосистемите взаимодействат с. Необходимо е да се променят стойностите на напрежението на алармената намотка или арматурата на електродвигателя до нивото на входното напрежение.

Директното управление на сервомотора и системата се осъществява от едно място - блока за управление. Когато се подаде команда за преместване на пистата по координатната ос X, в цифровия аналогов превключвател се появява напрежение на пистата, което е необходимо за захранване на задвижването с тази координата. Сервомоторът започва с външен ротор на ходовия винт, свързан с енкодера и копчето на главния механизъм.
Импулсите се вибрират в енкодера, което се поддържа от блока, който управлява серво задвижването. Програмата съдържа различни сигнали от енкодера, инсталиран в станцията, които могат да преминат през крайния механизъм. В необходимия час аналоговият преобразувател, отхвърлил зададената сила на импулса, приема изходното напрежение, в резултат на което сервомоторът се компресира. И така, точно под притока на импулси, напрежението се подновява и работата на цялата система се подновява.
Вижте характеристиките
Серво моторите се предлагат в различни варианти, което им позволява да се използват в различни приложения. Основните структури са разделени на колектор и са предназначени за работа като постоянен и променлив поток.
Освен това сервомоторът може да бъде синхронен или асинхронен. Синхронните устройства могат да задават скоростта на навиване с висока точност, както и скоростта на завоите и ускорението. Тези задвижвания бързо увеличават номиналната скорост на обвивката. Серво задвижванията в асинхронна верига се управляват чрез промяна на параметрите на веригата, когато нейната честота се променя от допълнителен инвертор. Те остъкляват с висока прецизност определената течливост на вятъра за най-ниските обвивки.

В зависимост от принципната схема и конструкция, серво задвижванията могат да бъдат електромеханични или електрохидромеханични. Първият вариант, който включва скоростна кутия и двигател, има ниска скорост. В друг случай действието е дори по-силно от буталото в цилиндъра.
Серво задвижването се характеризира със следните параметри:
- Моментът на усукване или zusilla, който се появява на вала. Уважаван като най-важният индикатор за роботизирано серво задвижване. За стойността на напрежението на кожата се използва моментът на мощност за усукване, който се показва в паспорта на вируса.
- Гъвкавост за обръщане. Този параметър представлява периода от време, когато е необходимо да се промени позицията на изходящия вал до 600. Тази характеристика също зависи от конкретната стойност на напрежението.
- Максималният ъгъл на въртене, който изходящият вал може да завърти. Най-често тази стойност е 180 или 3600.
- Всички сервоприводи са разделени на цифрови и аналогови. Управлението на серво задвижването е тясно свързано с това.
- Живот на серво мотори. Повечето модели имат напрежение в диапазона от 4,8 до 7,2V. Животът и управлението се осъществяват с помощта на трима водачи.
- Възможност за надграждане до серво задвижване с постоянна обвивка.
- Материалите за скоростната кутия могат да варират. Зъбните колела са изработени от метал, въглерод, пластмаса или композитни материали. Всеки от тях има своите успехи и недостатъци. Например, пластмасовите части са слабо изложени на удар, но са устойчиви на износване при редовна употреба. Металните зъбни колела обаче се износват бързо, след което миризмата развива висока устойчивост на динамичен интензитет.
Плюсове и минуси на сервомоторите
Благодарение на унифицираните си размери, тези устройства могат лесно и лесно да се монтират във всяка конструкция. Миризмата е тиха и надеждна, кожата от тях работи практически безшумно, което е от голямо значение, когато се използват на сгъваеми и подобни парцели. С ниски скорости можете да постигнете прецизност и плавни движения. Серво задвижването може да се регулира от персонала в зависимост от спецификациите.
Като недостатъци са посочени сложността на песента при коригиране и еднакво високо разнообразие.