Servodrive - bu nima? Servo drayverni o'z qo'llaringiz bilan qanday ulash mumkin? Servomotor nima va u qanday ishlaydi Elektr servo drayvlar.
Zvorotniy zvorotniy zv'yazok vyd servo haydovchi yoki "tiqilib qolgan gullar"
- Amperka kompaniyasining blogi
Barcha xabrakonstruktorlarga salom!
Men o'ylamasdan o'ylay boshladim: gullarni bolg'a bilan urish kabi asbobni ko'taring. Faqat robotli servo namoyishi uchun. Algoritm oddiy: biz bolg'ani ko'tarish buyrug'ini beramiz, tekshiring, sharob ko'tarilganda, bolg'ani qo'yib yuboring; va shuning uchun gullar tiqilib qolmaydi. Qo'shimcha datchiklar bilan korroziy bo'lmasdan, bolg'aning ishlayotganligini va tiqilib qolish ranglarini qanday bilish mumkin? "Yomon" servoni quvvatlang! Zrobitining maqsadi sifatida - tse va statda bo'lish vaqti haqida.
Servo haydovchi nima? Shubhasiz, siz hamma narsani bilasiz, lekin har xil tebranishlar haqida: bu shunchaki aylanish emas, kuch qo'llanilsa, lekin bu holatda berilgan kuta va vtrimatiyaga aylanish oson emas. Kut qo'shimcha PWM (PWM) signali uchun o'rnatiladi. To'g'ri qo'shiq lageriga servo boshqariladigan, o'z kuchining zodagonligi uchun ham aybdor. Qutidan oldin, men buklanganman, shuning uchun hozirgi kutni quvvatlantirish oddiydan ko'ra osonroq bo'ladi va bu "qutidan tashqarida" bo'lishi mumkin. U erda yo'q edi. Ale hamma narsa haqida tartibda.
Otzhe, folbinlik aksessuari: rashk uchun kichik poydevorga bolg'acha bilan yangi biriktirilgan servo-haydovchi. Servo Arduino-ga IO Shield orqali ulangan va mikrokontroller algoritmga amal qiladi:
- Bolg'ani ko'tarish uchun servo drayverni o'rnating
- Servodriver nimaga erishilganligini bilmaguncha harakat qilmang
- Servoning hayotini o'chiring, shunda bolg'a gullarga tushadi
- Lavozimdagi kesimni o'qing, nima tushdi
- Yiqilganidan keyin Yakshko kut, shox bir marta o'zgarmasdan uxlab qoldi - bu gullarning tiqilib qolishini to'xtatganligini anglatadi. Imovirno, vín tiqilib - pripinyaêmo vikonannya
- Yakshko kut o'zgaruvchan, biz qaytib boshlaymiz

Arralash va burish:

Keling, Arduino uchun proshivka yozishga o'taylik. Shvidkoni tugatish xizmat uchun kesilgan qo'shiqni o'rnatish uchun etarlicha aniq bo'ldi - muammo emas. Zocrema, bu standart Servo kutubxonasini yaratishga imkon beradi, shuning uchun ma'lum bir haroratdan darajalarda tegishli PWM signalini hosil qiladi. Va o'qishlar o'qi muammodir: buning uchun hech qanday funktsiyalar yo'q.
Muammoni tezda googling, forumlarda kupu povydomlen bilish, de on tse zapitanya vakolatli javob berdi: Tse mumkin emas! Servo drayvlar faqat yozish uchun qo'shimchalardir. Men xotirjam bo'ldim, men intuitiv ravishda etarlicha ma'lumot olish mumkinligini angladim.
matchastina
merezhí da bir oz qisqa poshukív so'ng, siz serf boshqariladi qanday tushunish mumkin. Doimiy oqimning asosiy dvigun, past vitesni tashkil etuvchi sprat tishli orqali harakatlanadigan shpindel bilan bog'lanishning bir turi. Ichki tomondan bir xil milya potentsiometrga (pidstroyuval rezistor) jismonan biriktirilgan. Dvigatel yoqilganda, mil aylanadi, potansiyometr slayderi aylanadi, potansiyometr kuchlanishi o'zgaradi, servi yogo o'qiladi va kuchlanish belgilangan darajaga yetdi - meta yetdi, vosita hayotda yoqiladi.Shuning uchun, siz oqim tezligini belgilashingiz mumkin bo'lgan signaldan keyin bizda potansiyometr bo'lishi mumkin. Kerakli joyda endi rozybrati servodrive va podklyuchitsya yo'q edi. Biz tanlaymiz:

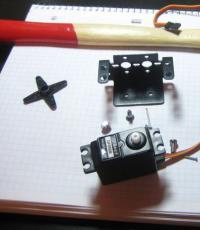
Sizga yana bir bor aytamanki, men tanlov jarayonida qaytarib bo'lmaydigan tarzda buzib tashlagan fotosuratdagi servo haydovchi. Elektronika uchun haq to'lash shart emas edi, shunchaki orqa qopqoqni olib tashlang, chunki u 4 vintda kesilgan. Ammo bu darhol aniq emas edi va taxtada potansiyometr qaerga lehimlanganligini tushunish uchun men bitta haydovchini qurbon qilishim kerak edi.
DFRobot tipidagi servo drayvlardagi eksa yak lehim potansiyometri:

Bizga yuguruvchidan signal kerak bo'lib, u minimal kuchlanishdan maksimal kuchlanishgacha burilishda o'zgarib turadi. Biz multimetrni olamiz, shpindelni o'rab olamiz va hayron bo'lamiz: qanday kutam qanday signalni ko'rasiz. 0 ° da mening xizmatim uchun kuchlanish 0,43, 180 ° da maksimal burilish uchun kuchlanish 2,56 V.
Yangi signal simini ehtiyotkorlik bilan lehimlang.

Yoga-ni Arduino-da A5 analog kirishiga ulang. Qopqoqni yopamiz. Biz dasturni yozamiz:
#o'z ichiga oladi
Yoqing, harakat qiling, mashq qiling!
Otrimanim dosvidom bilan qanday ishlash kerak - variantlar juda ko'p: siz surish (oldinga / orqaga teskari) o'rnatish uchun kemalarda g'olib bo'lgan narsaning kshtaltiga boshqaruvchi qo'shishingiz mumkin; mashinaning avtonom kerm boshqaruv elementi sifatida qayta qo'ng'iroq bilan servoni urishingiz mumkin; sizda hamma narsa ko'p bo'lishi mumkin. Salom biz bilan keling fantaziya!
Servodrive(Lotin servus - xizmatkor, yordamchi; olib kel, nima tikish kerak)- Keruvannyamni olib keling salbiy qo'ng'iroq , bu parametrlar bilan harakatni aniq keruvatsiya qilish imkonini beradi.
Servodrive eng ko'p robototexnikada qo'llaniladi. Ayniqsa, muhim ob'ektlarning aniq harakatlanishi vazifasi haqida gapiradigan bo'lsak, busiz qilish mumkin emas. Bunday vazifa mexanik robot (farbuvannya, zavaryuvannya, silliqlash, konveyerda virobiovni yupqa harakatlantirish) bo'ladimi, vikonnanny soati uchun aybdor. Manipulyatorlar mexanik qo'llar kabi ko'rinishi mumkin bo'lgan bunday robotni yutadi. Butun dunyoda tebranishlarni avtomatlashtirish bo'yicha g'olib bo'lgan Vlasne, robototexnikaning taniqli kasblari bizga manipulyatorlar oldida taqdim etiladi. Va hech bir bunday manipulyator yogada ishlatiladigan servo drayvlarsiz ishlamaydi. Nega?
Hammasi o'ngda servo kuchida. Servodrive haydovchi bo'lib, unda salbiy burilish signali mavjud bo'lib, u haydovchiga (asosan burilish mili) ruhu vykonavchoy (chiqish) lanka parametrlarini aniq nazorat qilish imkonini beradi. Bunday burilish signalini yaratish uchun servo drayverning joylashuvi sensori ovozi eshitiladi yoki tezlik, shovqin va hokazo sensorlar bloklanishi mumkin. isya yoki xuddi shu holatda aylantiring. Agar joylashuv tiklansa va "tekshirilsa" docklarga pozitsiyani o'zgartirish buyrug'i kerak emas. Misol uchun, 90 graduslik pozitsiyaning tepasida milning o'rnatilishi haqida signal beriladi. Mil to'g'ri holatga aylanadi va to'xtaydi, doklar yangi lager haqida signal olmaydilar. Bunday burilish imkoniyati, kuchlanish yangisiga qo'llanilsa, endi binoda uzluksiz bo'lgan servo-diskli motor-reduktorni jiddiy ravishda jonlantiradi. Natijada, agar robot shunday drayvlar bilan jihozlangan bo'lsa, u inson qo'li kabi qulab tushishi va o'sha robotni urishi mumkin, chunki biz uni mag'lub eta olamiz.
Servo drayverlarning xilma-xilligi sanoatga boy. Oddiyroq ko'rinadi, bunday servo drayvlar atrofida o'ralgan milga ega viskoz chiroqqa ega. Oddiylik uchun biz SG-90 hobbi-servo drayverini (1-rasm) ko'rib chiqamiz, u robotlarning dastlabki modellarini va uchadigan yoki uchadigan boshqa mexanizmlarni yaratishda faol foydalaniladi. Hobi-servodrive, vídmínu víd íí̈í̈ promislovy, istotno rozmíry dan kam, kam susilla rivojlanadi, boshqacha tarzda cheruêtsya, lekin promislovy egizak mutlaqo bir xil díí̈ tamoyili ortida.
Malyunok 1
Xobbi-servo haydovchiga biriktirma 2-rasmda ko'rsatilgan. Elektr dvigateli, viteslar to'plamiga ega vites qutisi, potansiyometr (burilish rishtasi uchun joylashish sensori funktsiyasini boshqaradi), elektr motorining elektron boshqaruv platasi. va butun joyni qamrab oladigan uy-joy omborga kiradi. Ushbu kichik dalillarga ko'ra, ular qandaydir servo haydovchining yordami uchun uni qadrlashadi. Sharob 3 yadrodan iborat: "ortiqcha" eyish, "minus" eyish va nazorat qilish uchun signal yuboriladigan sim. Hobi-servolarning turli modellarida dartlar boshqa rangga ega bo'lishi mumkin. Ale, qora ranglar uchun "ortiqcha" tirikchilik va qora ranglar uchun "minus" jonli simni o'rnatish amaliy. Signal signali (muhim signalni uzatish uchun) uchun aniq rang standartlari mavjud emas. Har xil turdagi servo drayverlar uchun signal simi oq, to'q sariq yoki sariq bo'lishi mumkin.

Malyunok 2
Keruvannya uchun bunday dvigatellar standart keruyuchy signalini qabul qildilar. Vin doimo impulslarni takrorlaydi, biz aytganimizdek, past impulslar (3-rasm). Ushbu impulslarning chastotasi doimiy ravishda doimiy ravishda to'ldiriladi va 50 Gts ga aylanadi. Chiqing, qancha vaqtimpulslar (susidnyh impulslarning etakchi qirralari orasidagi soat) 1s/50 = 0,02 soniya, ya'ni 20 millisekundga aylanadi.

Chaqaloq 3
Bu nima, servo haydovchining chiqish milining yuqori holati berilgan impulsning trivalitesiga o'rnatiladi. Aniqlik uchun, kichik 4 soatlik koordinatalarda impuls kengligining taxminan tezligini va servo milning burilishini ko'rsatadi. Servo milning aylanish nazorati 1 dan 2 ms (millisekundlar) oralig'ida trivallikning qo'shimcha impulslariga bog'liq.

Malyunok 4
Grafikdan ko'rinib turibdiki, servo drayverni boshqarish uchun impuls kengligi modulyatsiyasi - PWM signali sifatida boshqa hech narsa ishlatilmaydi. Qanday turdagi WIMni bizning veb-saytimizda tegishli statistik ma'lumotlardan bilib olish mumkin.
Va chiqishda kesilgan shaftda impulsning kengligi qanday o'zgaradi?
Kichkina 2 ga tayinlanganidek, servo haydovchi korpusida elektron motor boshqaruv moduli ham mavjud. Servoga yuborilgan signal taxtaga yuboriladi. Va bu uzoq signal bilan ko'rinadiganlarning o'qi biz bosqichma-bosqich tahlil qiladigan kichik 5 blok diagrammasida ko'rsatilgan. Teri bosqichi to'rtburchaklar bilan tasvirlangan yoki aylana bilan raqamlangan. Signalga o'tish mavjud bo'lgan kengaytma tasvirida ushbu to'rtburchaklarning o'rtasidan foydalaning.

Malyunok 5
Keyinchalik, PWM modulyatsiyasi bilan kirish nazorat qilish signali Spr mantiqiy elementlarga ega bo'lgan maxsus mikrosxemaga keladi, uning yordami uchun u Upr kuchlanishiga aylantiriladi (1-bosqich). Birinchi Ucontrol signalidan keyin (quvvat kuchlanishi) teng kuchlanish elementi topilishi kerak. Ushbu element adder deb ataladi, lekin aslida, kirish signali Ucontrol dan xato Uobr kuchlanishini ko'rsatadi (qaytish rishtasining kuchlanishi), bu o'zgarish qarshiligidan (2-bosqich) qaytish aloqasi orqali kelishi kerak.
Chiqib ketgan chakana Ukorr (tuzatish kuchlanishi) haydovchi tomonidan sinab ko'rilmoqda (3-bosqich) va elektr motoriga oziqlanadi. Dvigatel aylantiriladi (4-bosqich) va chiqish mili servo haydovchiga yoqiladi va ayni paytda o'rash sensori potansiyometrga ulanadi. Potansiyometr tugmasi o'ralgan bo'lsa, kuchlanish o'zgaradi va chiqadi, shuning uchun milning aylanishi Uobr kuchlanishiga o'zgaradi (5-bosqich). kuchlanish Uobr kuchlanish Uupr bilan tenglashtirilgan (yangi bosqich No 2) va farq ko'rinadi Ukor yana elektr ta'minoti (bosqich No 3) va hokazo o'ting. Uyg'onishgacha bo'lgan soatgacha burilish qo'ng'irog'idan lanset bilan "yurish" uchun signal Utr = Uobr. Shunda Ucor 0 ga teng bo'ladi va dvigatel shitirlaydi. Bu kerak bo'ladi, agar servo mil o'rnida bo'lsa, kirish signali nima deydi, Suprni nima boshqaradi.
Uzagalny mo'ylovi. Servo qo'zg'aysan mili potansiyometr tutqichidan mexanik ravishda ulanadi. Servo haydovchining bir xil burilishi orqali potansiyometr milni aylantiradi, buning natijasida opir va chiqish kuchlanishi Uobr o'zgaradi. Shubhasiz, Uobr potentsiometridan chiqadigan kuchlanish to'g'ridan-to'g'ri servo haydovchini aylantirish yo'nalishida yotadi. 0,001 dan 0,002 sekundgacha bo'lgan impulslarning trivalligi bilan bir soatlik kirish servo haydovchi signali Supr va kuchlanish darajasini Vupr o'rnatadi, chunki u qaysi servo qo'zg'aysan milini burilish uchun aybdor ekanligini aniqlaydi. Hozirgi vaqtda elektr motorining Zupinka, agar servo qo'zg'aysan milining o'zi kerakli holatda bo'lsa, Uobr burilish signalining Ucontrol signali nazorat signaliga etadi. Va 3-bosqichning kuchaytirgichi elektr motoriga kuchli kuchlanishni qo'llash va servo milni maksimal tezlikni sozlash uchun zarurdir.
Keruvannyani servomotor bilan qo'llang
Yuqorida aytib o'tilganidek, servomotorni boshqarish uchun PWM asosiy parametrlar bilan o'rnatiladi. Bunday PWM ni turli yo'llar bilan yaratishingiz mumkin. Keling, ularning qilmishlarini ko'rsataylik.
1. 555 taymer yordamida servo motorni boshqarish . 555 taymer chipi impuls generatori rejimida ishlatilishi mumkin (ushbu mikrosxema bo'yicha hisobot uchun tegishli maqolani o'qing). Robot mikrosxemaning bunday parametrlarini tanlash ham mumkin, shunda u bizga kerakli impulslarni ko'ra oladi. Impulslar oralig'ini o'zgartirish usuli, ya'ni impulslarning trivalitesini 0,001 dan 0,002 sekundgacha o'zgartiring, biz servo milning aylanishini o'rnatamiz.
PWM signalini amalga oshirish uchun 50 Gts doimiy chastotada tartibga solinadigan impuls oralig'iga ega bo'lgan sxemadan foydalanish kerak. Sxemadagi komponentlarning parametrlari (6-rasm) aqlning xavfsizligini ta'minlash uchun shunday tartib bilan tanlanadi. Ammo agar cheruvannya signali barcha aqllarni quvontirsa, uni teskari qilish kerak. Devrendagi tranzistor eng zarurdir. Chegaralar vazifalarida Schob keruvati sparuvatistyu, maksimal 20 kOm opir uchun buv bi potansiyometr talab qilinadi. Biz ikkita 10 kŌ potentsiometrni g'alaba qozonamiz (bir xil potensiometrlarning skallari Evolvektorning 1-darajali asosiy to'plamida g'alaba qozonadi, bu erda sxema tasvirlangan. Servomotorning ishlash tezligi 180 daraja bo'lishi kerak. Servo haydovchi gradusga aylanadi, va qo'shimcha o'rash uchun - boshqa tomondan 90 daraja.

Malyunok 6
Qo'shimcha ma'lumot olish uchun sxemaga qarang va uni o'zingiz tanlang, siz 1-darajali Evolvektorning asosiy to'plamini sotib olishingiz mumkin.
2. Tekshirgichning yordami orqasida servomotorni boshqarish. V qo'shimcha boshqaruvchi bilan kerakli PWM signalini yaratish ham mumkin. Misol uchun, siz Arduino platformasida kontrollerning dasturlashini sozlashingiz mumkin. Servomotorni (PWM avlodini) boshqarish algoritmini dasturlashni maksimal darajada soddalashtirish uchun kutubxonalar deb nomlangan dasturlarni yozishda kechikish bo'lishi kerak. Koristuvach dan qo'shimchalarning buklangan dastur kodi, faqat kutubxona bizning asosiy dasturimizga ulanganda qisqa buyruqlar yordamida bizga kerak bo'lgan funktsiyalarning yorliqlaridan foydalanish mumkin. Har bir narsa servomotor kabi bunday qo'shimchalarni boshqarishning algoritmik ko'rinishi yordamida iloji boricha sodda va oson bajarilishi kerak.
Ulanish sxemasi, shuningdekArduino servomotor boshqaruvchisi tomonidan keruvannya uchun eskiz (dastur) kichik 7 ni ko'rsatadi.
Malyunok 7
UVAGA: vositachisiz to'lash uchun servomotorning ishlash muddatini ulash, masalan, dumba kabi (7-rasm) shart emas. Bizda kichik ulanish uchun "mini" toifasidan bitta servomotor mavjud, u allaqachon kichik oqimga ega, u orqali sharoblar muntazam ravishda qayta ishlanadi, vositachi to'lovlarsiz ovqatlanadi. Standart o'lchamdagi servo ko'proq bosim talab qiladi, bu esa kontrollerning qizib ketishiga olib kelishi mumkin. Jonli dvigunív síd zdíysnyuvati ulanishi kamdan-kam hollarda okreme dzherelo orqali, ayniqsa servo drayvlar tomonidan bir vaqtning o'zida uzatiladi.
#o'z ichiga oladi<Servo .h>- Bu buyruq kutubxonaning servo haydovchi tomonidan burilish uchun ulanishini anglatadi. Ushbu kutubxona Evolvector diskida joylashgan bo'lib, u bizning boshqa darajadagi to'plamlarimiz bilan birga taqdim etiladi. Uni Internetda ham topish mumkin va Arduino IDE-ning "kutubxonalar" jildiga joylashtirilishi mumkin.
Kutubxona ko'p sonli buyruqlarga ulangan, faqat dasturda g'olib bo'lganlarni ko'rish mumkin.
Servo haydovchi; - maxsus turdagi tse goloshennya o'zgarishi. harakat- tse o'zgarishi (men ismni etarlicha tanlayman). Servo- o'zgartirish turi (ilova qilingan kutubxona tomonidan o'rnatiladigan maxsus tur). 12 tagacha servoni boshqarish uchun 12 tagacha servo turlarini o'rnatishingiz mumkin. Boshqacha qilib aytganda, biz kengashga bizda servo haydovchi borligini aytdik, biz uni chaqirdik harakat.
move.attach(9);- bu buyruq servo haydovchi ( harakat) 9 pingacha (visnovka) kelganlar.
move.write(90); - tsya buyrug'i zmushuê servodrive ( harakat) o'rta holatda (90 daraja) aylantiring.
move.write(0); - Servoni 0 darajaga aylantiring.
dvig.write(180); - Servoni 180 darajaga aylantiring.
Veb-saytimizning yon tomonlarida dastur qatorlarini o'zgartirish yoki bosh yordamchilarni tanib olish nimani anglatishini, omborga qanday kirishni bilib olishingiz mumkin.
Ushbu maqolada servo drayvlar ko'rib chiqiladi: ularning biriktirilishi, tan olinishi, servo boshqaruvi, servo haydovchiga ulanishi, turli xil servo drayvlar va ularning ulanishi. Keling, boshlaylik va servo nima ekanligini bilib olaylik.
Servoni tushunish
Servo haydovchi ostida elektr motorli mexanizm ko'pincha tushuniladi, siz vazifalarni aylantirish va vaziyatni kamaytirishni so'rashingiz mumkin. Biroq, biz tayinlanish haqida bilmaymiz.
Ochig'ini aytganda, servo boshqariladigan - tse s keruvannyani salbiy burilish rishtasi orqali boshqaradi, bu sizga keruvati parametrlarini ruhu to'g'ri ko'rsatish imkonini beradi. Servo haydovchi - bu omborda sensori (joylashuvi, tezligi, tezligi va boshqalar) va sensordagi kerakli parametrlarni avtomatik ravishda moslashtiradigan va kerakli qiymatlarni o'rnatish uchun moslashtiradigan haydovchi boshqaruv blokiga ega bo'lishi mumkin bo'lgan har qanday turdagi mexanik haydovchi.
Boshqa so'zlar bilan aytganda:
Servo boshqariladigan parametrning qiymatini kiritadi. Masalan, kut burilish
Keruvannya bloki o'z sensoridagi qiymatlar bilan bir xil qiymatga mos keladi
Hizalama natijasiga ko'ra, kunni o'g'irlash kerak, masalan: ichki sensorning qiymati boshqariladigan tashqi parametr qiymatiga yaqinlashishi uchun burish, tezlashtirish yoki oshirish.
Berilgan o'rash tezligini yaxshilash uchun kesish va servo topshiriqlarini kesish uchun eng keng diapazonli servo drayvlar.
Odatda sevimli mashg'ulotlariga asoslangan servo tasvir quyida ko'rsatilgan.
Servo qaysi daraja bilan boshqariladi?
Servoga ulanish
Servomotorlar ombor qismlarini purkash mumkin.

Privyd - vites qutisi bo'lgan elektr motor. Elektrchini mexanik burilishga aylantirish uchun zarur elektr motor. Biroq, dvigunni o'rashning shvedning ko'pchiligi amaliy burilish uchun juda katta. Shovqinni kamaytirish uchun reduktor: momentni uzatuvchi va aylantiruvchi tishli mexanizm.
Ushbu elektr motorni yoqqaningizdan so'ng, siz chiqish milini o'rashingiz mumkin - servo haydovchining so'nggi tishli qismi, uni qaysi biriga aylantirmoqchi bo'lsangiz, ulashingiz mumkin. Prote, vaziyat ilova tomonidan nazorat qilindi, shunday qilib, zarur xabar beruvchi sensori - kodlovchi, bu elektr signaliga qaytishni o'zgartiradi. Buning uchun ko'pincha potansiyometr ishlatiladi. Potansiyometrning tugmachasini aylantirganda, tayanch burilishga mutanosib ravishda o'zgaradi. Ushbu darajada, yogadan so'ng, yordam uchun soddalashtirilgan mexanizmni o'rnatishingiz mumkin.
Elektr dvigatelining, reduktorning va servo haydovchidagi potansiyometrning krimlari elektron plomba hisoblanadi, chunki u tegishli parametrni qabul qilish, potansiyometrdan qiymatni o'qish va motorni yoqish / o'chirishga bog'liq. Vaughn va pídtrimku salbiy zvorotnogo zv'yazku uchun vídpovídaê.
Servoga uchta dart tortiladi. Ulardan ikkitasi dvigatelning ishlash muddati davomida xizmat qiladi, uchinchisi boshqaruvchi signalni etkazib beradi, bu esa binoning o'rnini belgilashda g'alaba qozonadi.
Keling, qo'ng'iroq servosini qanday boshqarishni ko'rib chiqaylik.
Servo boshqaruv. Asosiy signallar interfeysi
Servoga servoning holatini ko'rsatish uchun servoga ma'lum bir signal yuborish kerak. Keruichiy signal - doimiy chastotali va o'zgaruvchan kenglikdagi impulslar.

Vaziyatda bo'lganlar servodriveni olishlari, impulslar havosida yotishlari mumkin. Agar signal boshqariladigan kontaktlarning zanglashiga olib kelsa, u holda impuls generatori uning impulsini tebratadi, uning haqiqiyligi potansiyometr orqali o'lchanadi. Sxemaning ikkinchi qismi ikkita impulsning trivalligini tenglashtirishdir. Trivalite kabi, elektr motor o'yinga kiradi. O'rash to'g'ridan-to'g'ri u tomonidan ko'rsatiladi, bu impulslarning eng qisqasi. Impulslar kuchayishi bilan elektr motori jiringlaydi.
Ko'pincha, hobbi servolarida impulslar 50 Gts chastotada tebranadi. Tse pulsning har 20 msda bir marta tebranishi va qabul qilinishini bildiradi. Impulsning trivalitesini 1520 mks tezlikda eshiting, ya'ni servo haydovchi o'rta pozitsiyani egallashda aybdor. Yilning o'qidan keyin burilish uchun servo drayverni yuborish uchun impulsni oshiring yoki o'zgartiring yoki o'qning teskari yo'nalishi aniq. Qaysi biri bilan impulsning yuqori va pastki trivalligi ishlatiladi. Qulf ortidagi Arduino uchun Servo kutubxonasi quyidagi impuls qiymatiga ega: 0 ° uchun 544 mks va 180 ° uchun 2400 mks.
Shuni yodda tutingki, sizning kengaytmangizda zavod sozlamalari standart sozlamalardan farq qilishi mumkin. Deyaky servo haydovchi vikoristovuyut puls kengligi 760 mks. O'rta pozitsiya 760 mks, bu kattaroq servolarda o'rtacha 1520 mks.
Shunday qilib, varto bu ko'proq yoki kamroq zagalnopriynyati dozhini degan ma'noni anglatadi. Dojinning ishlash diapazoni va impulslarning buzilishiga olib kelishi uchun o'zgaruvchanlik holatlarida ruxsat etiladigan servo haydovchining bir xil modeli doirasidagi Navit ta'sir qilishi mumkin. Aniq robototexnika uchun ma'lum bir servo drayverni kalibrlash mumkin: tajriba orqali yangisiga xos bo'lgan to'g'ri diapazonni tanlash kerak.
Ko'proq urush uchun hurmat qilish uchun, keyin terminologiyada firibgar uchun. Ko'pincha, servolarni boshqarish usuli PWM / PWM (Pulse Width Modulation) yoki PPM (Pulse Position Modulation) deb ataladi. Bu shunday emas va bu usullarni tanlash omadsizlikka olib kelishi mumkin. To'g'ri atama PDM (Pulse Duration Modulation). Yangisida impulslarning uzunligi juda muhim va ularning paydo bo'lish chastotasi unchalik muhim emas. 50 Hz - bu norma, lekin servo-boshqaruv amaliyoti 40, í 60 Gts uchun to'g'ri. Onaning grippi bo'lsa, zarur bo'lgan yagona narsa - bu tomirlar chastotasining kuchli o'zgarishi bilan kuchlanishning pasayishi va chastotaga kuchli bog'liqlik (masalan, 100 Gts) bilan ishlashi mumkin. , ular haddan tashqari qizib ketishi va ohangdan chiqib ketishi mumkin.
Servo xususiyatlari
Keling, servolar qanday ekanligini va xususiyatlar qanday hidlanishi mumkinligini aniqlaylik.
Tork va aylanish tezligi
Keling, servo haydovchining yana ikkita muhim xususiyati haqida gapiraylik: burilish nuqtasi men pro burilish tezligi.
Quvvat momenti yoki burilish momenti vektor jismoniy miqdor bo'lib, u o'rash o'qi orqali kuchni xabar qilish nuqtasiga, kuch vektoriga tortilgan radius vektorini qo'shishga yordam beradi. Kuchning qattiq jismga ochiq ta'sirini xarakterlang.

Bu oddiyroq ko'rinadi, lekin xarakteristikasi muhim kunni tinchlantirish uchun bino servo haydovchining qanchalik muhim ustunligini ko'rsatadi. Agar servo drayverning aylanish momenti 5 kg × sm bo'lsa, u holda servo haydovchi gorizontal holatda vazoda 1 sm ga qisqardi va vilny uchida 5 kg ko'tarildi. Ammo ekvivalent bo'lgan narsa, 5 sm, 1 kg gacha oshirish muhimdir.
Servo drayverning tezligi bir soatlik interval bilan boshqariladi, bu menga servo haydovchi 60 ° ga aylanishi uchun kerak. 0,1 s/60 ° xarakteristikasi servo 0,1 soniyada 60 ° ga burilishini bildiradi. Kattaroq o'zgaruvchida tezlikni hisoblash oson emas, nay boshiga aylanishlar, lekin shunday bo'ldiki, servo drayverlarni tavsiflashda bunday bittasini hisoblash odatiy holdir.
Varto, ba'zida ikkita xususiyat o'rtasida murosalar bo'lishi kerakligini anglatadi, agar biz katta ahamiyatga ega bo'lgan yuqori darajadagi servo haydovchini xohlasak, unda biz aybdormiz, lekin biz tayyormiz, bu o'rnatish to'g'ri aylanishi mumkin. Va agar biz shved arvohiga ega bo'lishni istasak, unda rashk pozitsiyasidan chiqib ketish oson bo'ladi. Bitta va bir xil dvigatel o'zgartirilganda, balans vites qutisidagi viteslarning konfiguratsiyasi bilan belgilanadi.
Shubhasiz, biz har doim spozhivaê katta kibirli, smut, yig'lab vv xususiyatlari ma'qul iste'molchilar o'rnatish, olishi mumkin.
Shakl omili
Servo drayvlar o'lchamlari uchun farq qiladi. Rasmiy tasnif bo'lmasa ham, begona o'tlar uzoq vaqtdan beri ko'p sonli rozmírív íz galnopriynym rozashuvannyam krypilnyh elementív uchun kesilgan. Їx quyidagilarga bo'linishi mumkin:
kichik
standart
Bir vaqtning o'zida hid bor, o'lchamlar juda xarakterlidir:
O'lchamlari tasniflash toifasiga kirmaydigan "maxsus turdagi" servo drayvlar ham mavjud, ammo yuzlab bunday servo drayvlar bundan ham kichikroq.
Ichki interfeys
Servo drayvlar analog va raqamli. Unda nega kuchlar, afzalliklar va kamchiliklar bor?
Hid tovushlarini hech narsa bezovta qilmaydi: elektr motorlar, vites qutilari, potansiyometrlar ular uchun bir xil, hidni faqat ichki keramik elektronika bezovta qiladi. Raqamli egizakdagi analog servo haydovchi uchun maxsus mikrosxemani almashtirish mikroprotsessor platasida qo'llab-quvvatlanishi mumkin, u impulslarni oladi, ularni tahlil qiladi va ularni vosita bilan boshqaradi. Shu tarzda, jismoniy vikonanniní vídminníst motor tomonidan impulslar va egrilik qayta ishlash yo'lida kamroq.

Servo haydovchining ofset turlari boshqarish uchun bir xil impulslarni oladi. Shundan so'ng, analog servo haydovchi pozitsiyani o'zgartirish to'g'risida qaror qabul qiladi va dvigatelga turli vaqtlarda signal yuboradi. Vydbuvaetsya tse zazvichay yz chastotasi 50 Hz. Ushbu tartibda 20 ms talab qilinadi - reaktsiyaning minimal soati. Bu soatda be-yak ovnishnya diya zdatna servo holatini o'zgartiradi. Ammo bitta muammo bor. Siz xotirjam bo'lganingizda, elektr motoriga kuchlanish qo'llanilmaydi, kichik nafas bo'lsa, elektr motoriga past kuchlanishning qisqa signali beriladi. Qanchalik ko'p nafas olsa, signal kuchayadi. Shu tarzda, kichik servo drayvlar bilan dvigatelni tezda o'rash yoki ajoyib daqiqani ishlab chiqish mumkin emas. "O'lik zonalar" soat sayin o'rnashib bormoqda.
Ushbu muammolarni qabul qilish chastotasini oshirish, signalni qayta ishlash va uni elektr motori bilan hal qilish orqali bartaraf etish mumkin. Raqamli servdrives boshqaruv impulslarini qabul qiluvchi, ularni qayta ishlaydigan va 200 Gts va undan ortiq chastotali dvigatelga signallarni yuboradigan maxsus protsessordan foydalanadi. Binoning raqamli servo drayveri qo'ng'iroqlarga ko'proq reaktiv bo'lishi uchun kerakli tezlikni va aylanish momentini ishlab chiqish yaxshiroqdir, shuning uchun berilgan pozitsiyani kesish yaxshidir, bu yaxshi. Zvichayno, qaysi vinolar bilan siz ko'proq elektr energiyasini tejaysiz. Bundan tashqari, raqamli servo drayvlar zavodda yig'iladi va narxi ancha qimmat. Vlasne, tsí ikkita nedoliki - barcha minuslar, raqamli servo drayvlarda yaki ê. Texnik rejada hid doimo analog servolar tomonidan bekor qilinadi.
Tishli materiallar
Servo drayvlar uchun viteslar turli materiallardan tayyorlanadi: plastmassa, uglerod, metall. Barcha hidlar keng vikoristovuyutsya, o'ziga xos vazifalarni yolg'on tanlash va xususiyatlari o'rnatish kerak, deb aslida.

Plastik, asosan neylon, viteslar engil, kiyish uchun zaif emas, servolarda eng keng. Xushbo'y hidlar katta behudalikni ko'rsatmaydi, lekin behuda hali ham kichik, keyin neylon viteslar eng yaxshi tanlovdir.
Uglerodli uzatmalar eskilariga qaraganda kattaroq, neylon uzatmalar bilan bir vaqtda deyarli eskirmaydi. Asosiy kamchilik - bu yo'l.
Metall tishli eng muhim, hidga qarshi vitriumuet maksimal navantazhennia. Shvidko znoshuyus tugatish uchun, deb minyati shirny amaliy teri mavsumda sodir. Titan viteslar texnik xususiyatlari va narxi bo'yicha metall uzatmalar orasida eng sevimli hisoblanadi. Afsuski, badbo'y hid sizga qimmatga tushadi.
Kollektor va cho'tkasiz motorlar
Servo motorlarning uch turi mavjud: standart yadroli vosita, yadrosiz vosita va cho'tkasiz vosita.

Yadroli (o'ng qo'lda) birlamchi dvigatel yog'och o'rash va yon tomonida magnitlangan qattiq yadroli rotor bilan jihozlangan. Rotor bir necha bo'limga ega bo'lishi mumkin, shuning uchun vosita o'ralgan bo'lsa, rotor bo'limlar magnitdan o'tganda kichik miqdordagi motorni tebranadi va buning natijasida tebranadigan va kamroq aniqroq bo'lgan servo haydovchi chiqadi. yadrosiz dvigatelli servo haydovchi. Bo'sh rotorli vosita (levoruch) magnit atrofida silindr yoki halqa shaklida o'rash bilan bitta magnit yadroga ega bo'lishi mumkin. Yadrosiz struktura vag orqasida engilroq va bo'limlarga ega emas, bu esa ko'proq suyuqlikka olib kelishi va hatto tebranishsiz ishlashi mumkin. Bunday motorlar qimmat, lekin hidi standart bo'lganlar bilan teng qismlarda nazorat qilish, moment, va tezlikni yuqori darajada ta'minlaydi.

Yaqinda cho'tkasiz motorli servo drayvlar paydo bo'ldi. Afzalliklar bir xil, ammo boshqa kollektor bo'lmagan motorlarda: qalqonlar yo'q va shuning uchun badbo'y hid opir o'ramini yaratmaydi va eskirmaydi, tezlik va moment teng kollektor motorlariga oqim paytida yuqori bo'ladi. Cho'tkasi bo'lmagan motorli servo drayvlar eng qimmat servo drayvlardir, ammo bu hid bilan yaxshi xususiyatlarni boshqa turdagi motorli servo drayvlar bilan solishtirish mumkin.
Arduino-ga ulanish
Ko'pgina servolar to'g'ridan-to'g'ri Arduino-ga ulanishi mumkin. Ularning qaysi turi uchun uchta dartdan iborat poezd mavjud:
chervoniy - ovqatlanish; 5V kontaktiga yoki to'g'ridan-to'g'ri quvvat manbaiga ulangan
jigarrang yoki qora - tuproq
sariq yoki oq - signal; Arduino raqamli chiqishiga ulanadi.
Arduino-ni ulash uchun siz Troyka Shield kabi portni kengaytirish platasi bilan qo'lda ulanasiz. Agar siz qo'shimcha simlar bilan xohlasangiz, servoni non paneli orqali yoki to'g'ridan-to'g'ri Arduino kontaktlariga ulashingiz mumkin.
Siz o'zingiz kuchli impulslarni yaratishingiz mumkin, lekin taxta zavoddan kengroqdir, soddaligi uchun standart Servo kutubxonasi mavjud.
Oziq-ovqat xizmati
Xobbi-servo boshqariladigan robot soati 100 mA dan ortiq ishlaydi. Qaysi Arduino bilan siz 500 mA gacha ko'rishingiz mumkin. Shuning uchun, agar siz loyihada qattiq servo drayverni ishlatishingiz kerak bo'lsa, uni qo'shimcha ovqatlanishdan sxemada ko'rish haqida o'ylash yaxshidir.
Keling, 12V servo ulanishining uchini ko'rib chiqaylik: 
Ulangan bir qator servo drayverlarga almashtiring.
Ko'pgina Arduino platalarida Servo kutubxonasi 12 dan ortiq bo'lmagan servolarni boshqaradi, Arduino Mega-da bu raqam 48 tagacha ko'tariladi. 9 ta analogWrite() funktsiyasini yengib bo'lmaydi va 10 ta kontakt mustaqildir, bundan tashqari, servolar ushbu kontaktlarga ulangan. Arduino Mega-ga PWM / PWM funktsiyasini buzmasdan 12 tagacha servo ulanishi mumkin, ko'proq servolar bilan biz 11 va 12 pinlarda analogWrite () ni yuta olmaymiz.
Servo kutubxona funksionalligi
Servo kutubxonasi servo drayvlar bilan dasturiy ta'minotni boshqarish imkonini beradi. Kim uchun, o'rash Servo turiga o'zgartiriladi. Quyidagi funktsiyalar tomonidan boshqariladi:
attach() - ma'lum bir pinga o'zgartirish kiritish. Bu funksiya uchun ikkita sintaksis mumkin: servo.attach(pin) va servo.attach(pin, min, max). Bu pinda - servo haydovchi qo'llanilishi kerak bo'lgan pinning soni, min va maksimal - 0 ° va 180 ° burilishdan keyin mikrosekundlarda impulslarning davomiyligi. Qulflar uchun teng 544 mikrosoniya va 2400 mikrosoniya ko'rsatilgan.
write() - servoga bir yoki bir nechta parametr qiymatlarini qabul qilishni buyuradi. Hujumkor sintaksis: servo.write(angle) , bu erda burchak servo qanday aylanishi mumkin.
writeMicroseconds() - oxirgi buyruqning servo-pulsiga buyruq yuborish uchun buyruq yuborish, oldinga yo'naltirish buyrug'ining past analogi. Murakkab sintaksis: servo.writeMicroseconds(uS) , bu erda uS pulsning mikrosekundlarda uzunligi.
read() - Servo ma'lum bo'lgan kuta qiymatini aniqroq o'qing. Hujum uchun sintaksis: servo.read() butun son qiymatini 0 dan 180 gacha aylantiradi.
ilova () - qayta tekshirish, ma'lum bir pinga o'zgartirish uchun chi qo'shildi. Hujum sintaksisi: servo.attached() , mantiqiy haqiqat aylantiriladi, go'yo bula biron bir nuqtaga o'zgartirilgan yoki teskari yo'nalishdagi bema'nilik.
detach() - bula tayinlangan pinni o'zgartirishingiz uchun dalolatnomani ta'mirlash, teskari biriktirma() . Kengaytirilgan sintaksis: servo.detach().
Servo2 kutubxonasining barcha usullari Servo usullari bilan ishlaydi.
Servo kutubxonalar qo'llaniladi
o'rinbosari
Servo drayvlar har xil, ba'zi yaxshilari arzonroq, ba'zilari yaxshilari aniqroq. Avvalo, qanday qilib servodrive sotib olish mumkin, uvazda varto ona, bu sizning loyihangizga mos keladigan yaxshi xususiyatlarning onasi bo'lmasligi mumkin. Tashabbuslaringizga omad!
Servodrive (nima tikish kerakligini haydash)- Burilish parametrlarini aniq nazorat qilish imkonini beruvchi salbiy burilish signali bilan boshqariladi.
Servo haydovchi - bu omborda sensori (joylashuvi, tezligi, tezligi va boshqalar) va boshqaruv bloki (elektron zanjir yoki mexanik bog'lanish tizimi) bo'lishi mumkin bo'lgan har qanday mexanik haydovchi (qo'shimcha, ishchi organ) dir. belgilangan qiymatga (boshqarish tugmachasining holati yoki boshqa tizimlardagi raqamli qiymat) ochiq datchikda, tashqi binoda) kerakli parametrlarni avtomatik ravishda sozlaydi.
Vikipediyadan olingan material - bepul ensiklopediya
Servodrive - butun haydovchi tizimi, tezlikni tartibga solishning keng diapazonida bo'lgani kabi, u dinamik, yuqori oqim jarayonlarini ta'minlaydi va yaxshi takrorlanishini ta'minlaydi. vídpratsyuvannya momenty uchun tan Tse tizimi, swidkostí va pozitsíї íz oldindan belgilangan aniqlik va dinamikasi. klassik servoddrive dvigatel, joylashuv sensori va uchta boshqaruv sxemasiga ega bo'lishi mumkin bo'lgan boshqaruv tizimidan iborat (pozitsiya, tezlik va oqim bo'yicha).
"Servo" so'zi lotincha "servus" so'ziga o'xshash bo'lib, xizmatkor, qul, yordamchi deb tarjima qilinadi. Mashina galuzahlarida qo'shimcha haydovchilardan ko'ra yomon hid muhimroq edi (ish stollarida yemlarni haydash, robotlarni nozik haydash). Biroq, bu yil vaziyat o'zgardi, endi asosiy etakchilar eng yaxshi servo texnologiya bilan amalga oshirilmoqda.
Belgilangan soatda servolar zastosovuyutsya u erda, de eng muhim sanoat qayta ishlash chastotalarini tartibga solishda aniqlik yo'qligi. Yuqori rentabellikdagi turg'unlik servo drayvlar yuqori mahsuldor davlat uchun zarur, asosiy mezon unumdorlikdir. Servo drayvlar sanoat robotlarining tezligini nazorat qilish va joylashishni aniqlash va yuqori aniqlikdagi ko'p qirralilik uchun nozik tizimlar bilan jihozlangan bo'lishi kerak. servolar shuningdek, koordinatali burg'ulash dastgohlarida, turli texnologik transport tizimlarida, turli xil yordamchi mexanizmlarda va boshqalarda o'rnatiladi. servolar.
Universal servoddrive
Universal servoddrive boy funktsiyalar to'plami, har xil turdagi servomotorlarni (ham sinxron, ham asinxron) boshqarish qobiliyati, burilish tovushining turli sensorlari bilan ishlash qobiliyati, shuningdek, bir qator variantlar va kengaytirish imkoniyati bilan tavsiflanadi. Aniq universal Servodrive dumba ustida KEB F5-Multi (Nimechchina) va Control Techniques Unidrive SP. (Angliya)
Servodrive KEB F5-Multi asosida
Servo KEV" align="RIGHT" width="20%" border="0">Sinxron va asenkron motorlar uchun teskari aloqa zanjiri bilan elektr haydovchi uchun boshqaruvchi. Ayniqsa, yopiq kontaktlarning zanglashiga olib ishlash uchun, aylanma ulanishning mumkin bo'lgan variantlari:
hal qiluvchi
kodlovchi
Sin-Cos kodlagichi
mutlaq kodlovchi
EnDat, Hiperface yoki taxogenerator
Asosiy qobiliyatlar va xususiyatlar:
keskinliklarning keng doirasi
kuchlanish 220 yoki 380 V
doimiy tinmay yashash mumkin
sensorsiz keruvannya dvigun
galvanik ajratilgan analog va raqamli kirish/chiqishlar
o'rni va tranzistorli dasturlash chiqishlari
Ko'rinishni boshqarish tizimi orqali markazlashtirilmagan parvarish kontseptsiyasini amalga oshirish mumkin:
tezlikni o'rash va momentni tartibga solish
pozitsiyani boshqarish
qulay o'rash rejimi
Kamera kalitlari
Elektron kamera disk
Yagona eksa joylashuvi
Aylanadigan stolning holati
Barcha drayverlar quyidagi interfeyslarni qo'llab-quvvatlaydi: Profibus, CAN, Sercos, InterBus, DeviceNet, Modbus, Ethernet, Ethercat, Powerlink, Profinet va KEB-HSP5/DIN 66019-II.
Vikonavchiy va maxsus Servodrive
Vikonavchiy servopriod pratsyuê píd kruvannyam ruhu boshqaruvchisi, maê obrazheniya nabír funktíy nalashtuvan, robot uchun oddiy. Shuning uchun, vikonavchy servo haydovchi yanada tejamkor. Keling, vikonavchiga qaraylik servolar sinxronlash bo'yicha servo drayvlar mekapion.
Vikonavchi servo haydovchi Mecapion

Sinxron servolar Mecapion (masalan, Metronix) - Rossiya fuqarolariga uzoq vaqtdan beri ma'lum bo'lgan sanoatni avtomatlashtirish sohasidagi tizim echimlari uchun asosiy mahsulot.
Asosiy xususiyatlar servo drayvlar Metronix
kuchlanish diapazoni 0,03 dan 11 kVtgacha
energiyani o'lchovda aylantirish imkonini beruvchi rekuperatorlar to'plami, bu dinamik galvanizatsiya paytida energiyani kamaytirishning kalitidir.
sinov rejimi
Dvigatel o'ralgan paytda tebranishlardan foydalanish funktsiyalari va yogik tirgaklar sizga robotni yuklanganda ham, ishlayotganda ham garov rejimida chastotani o'zgartirishga imkon beradi.
tashqi va mutlaq qo'shimcha pozitsiya sensorlaridan foydalanish imkoniyati
robotli boshqaruv tizimining rejimini tanlang - tezlikni yoki lahzani boshqarish
Kengaytirilgan dasturiy ta'minot to'plamining mavjudligi chastotani o'zgartirish va turli xil texnik vazifalar asosida o'zgartirish funktsiyalarini osongina o'zgartirishga imkon beradi (shu jumladan, besleme drayverlarini boshqarishni qanday amalga oshirish kerak).
bo'sh milga ega bo'lgan dvigatellarning Metronix mahsulot liniyasining mavjudligi oraliq biriktirmani kinematik sxemadan o'chirishga imkon beradi - yaxshi debriyaj
Istalgan vaqtda dasturlash tizimga turli xil favqulodda vaziyatlarda yuqori darajadagi mudofaa va operator uchun maksimal ma'lumot bilan ishlashga imkon beradi.
VS seriyali tezlik, moment (± 10 V) va pozitsiyalar (qadam/dir) ustidan nazoratni amalga oshiradigan standart isitish tizimidir.
VS seriyasining chastotalarini o'zgartirish quyidagi rejimlarda ishlashi mumkin:
impulslar ketma-ketligini o'rnatadigan boshqa kontrollerni tanlashda pozitsiyani o'zgartirish.
Analog yoki diskret kirishlarda xavfsizlikni tekshirish.
maksimal momentni kamaytirish rejimida analog kirish momentini nazorat qilish.
swidkistyu / pozitsiyasini tekshirish.
keruvannya swidkístyu / moment.
pozitsiyani/lahzani o'zgartirish.
Maxsus VP seriyasi maxsus vazifalarni bajarish uchun tan olingan:
oltita diskret kirish (VP1) orqali 64 tagacha pozitsiyani tanlash imkoniyati bilan chiziqli-koordinatali joylashishni aniqlash, odatiy to'xtash maydoni - sharli vintlarga uzatiladigan tizimlarda chiziqli harakatni ta'minlash
32 tagacha pozitsiyani tanlash imkoniyati bilan yuqori joylashishni aniqlash, beshta diskret kirish (VP2), odatiy sozlash maydoni - aylanuvchi stollar, aylanadigan konveyer liniyalari, avtomatik asbob almashtirgichni biriktirish.
tortish moslamasiga (VP3) etkazib berishning joylashishiga ko'ra joylashtirish, zastosuvannyaning odatiy ko'lami - qadoqlash mashinalari, motor milidagi kodlovchi signalidan keyin ham joylashishni aniqlashga qo'llanilishi mumkin bo'lgan barcha turdagi qo'shimchalar. , va tashqi diskret sensorning belgisidan keyin
uchta diskret kirish (VP5) bilan 8 tagacha dasturni tanlash imkoniyati bilan dasturlashtiriladigan joylashishni aniqlash, teri dasturi kommutatsiya chastotasi xotirasida saqlanadigan 100 tagacha pozitsiya (pozitsiya) bo'lishi mumkin.
VS chastota o'zgartirgichi va shaxsiy (promislov) kompyuterining aloqasi uchun MAQOMOTI porti, agar kerak bo'lsa, RS232/RS485 konvertori orqali ulanadi, chastotani o'zgartirgichga birlashtirilishi mumkin.
Integratsiyalar Servodrive
align="RIGHT" width="30%" border="0">bosh suv guruch, shuningdek, eng muhim ustuvor, integratsiya servo haydovchiê visnovok dvigun, nazoratchi, sensor zvorotny zv'yazku va bitta uy-joy peretvoryuvach chastotasi. O'rnatish operatsiyalarini minimallashtirish uchun nima qilish kerak, oddiy ulanish va o'rnatish, montaj ishlari uchun bir soatni qisqartirish, joyni sezilarli darajada tejash imkonini beradi, shuningdek, vartostda ijobiy ko'rsatiladi. servo haydovchi.
Rossiya bozorida ular allaqachon o'zlari uchun yaxshilik qilishgan va Timsohning ichki integratsiyasini tavsiya qilishgan. servolar SPS.
qisqa tutashuvli dvigatellar uchun moslashtirilgan algoritmga asoslangan choksiz (vektorli) boshqaruv
yopiq kontaktlarning zanglashiga olib keladigan yuqori dinamik ko'rsatkichlari dvigatel o'rashlaridagi oqimlarni tartibga solish
swidkostdagi yopiq konturlarning vikoristanny
dinamik tartibga solinadigan susilla fleyti uchun past tebranish
Yaxshi o'ylangan dizayn va oson o'rnatish
ixcham o'lcham va kichik massa
Robotik rejimlar servo haydovchi SPS
Dinamik - yuqori darajadagi kontrollerdan signal real vaqtda raqamli interfeys orqali uzatiladi. Dinamik rejim konturni burishni talab qiladigan tizimlarda (masalan, katlama kinematikasiga ega manipulyatorlarda va aniq joylashishni aniqlash uchun koordinata jadvallarida) g'alaba qozonadi.
Analog - swidk_styu signali uchun aylanish ±10 V. Daniya rejimi analog tizimlarni boshqarishni modernizatsiya qilish uchun drayverni aylantirish yoki qo'lda aylanish imkonini beradi (masalan, qo'shimcha rul uchun).
Tsiklik - yuqori darajadagi boshqaruvchi tomonidan dasturlash va tsiklik operatsiyalar drayvining xotirasini saqlash. Ko'pincha boshqaruv tizimining yuqori darajasining tashqi boshqaruvchisini o'chirish mumkin. Tsiklik rejim, masalan, konveyerlarda va noqulay ombor operatsiyalarida g'alaba qozonadi.
Merezhevy - bu rejim raqamli CAN interfeysi asosida servo tizimni ajratish, bir nechta o'qlarning sinxron yoki ketma-ket harakatini amalga oshirish imkonini beradi. Ushbu rejimda, shuningdek, "master-slave" rejimidan foydalanish mumkin, bunda haydovchi qo'zg'aluvchan milning holatini takrorlash rejimida ishlaydi.
Yuqori texnologiyalar asosida yaratilgan hozirgi mulk inshootlarida ana shunday turli xil avtomatik jarayonlar muttasil rivojlanib bormoqda. Ular orasida doimiy dinamik harakatlarning ko'plab elementlari va detallari bilan qurish usuli bilan o'rnatiladigan keng enli servo boshqariladigan poyabzallar mavjud. Ushbu qo'shimchalar milning burilishlari ustidan doimiy nazoratni ta'minlaydi, elektromexanik turdagi kerakli armaturalarni o'rnatadi.
Ushbu tizimlarning saqlash qismi servomotorlar bo'lib, ular vintlarni soat oralig'ida kerakli diapazonda aylantirish imkonini beradi. Shunday qilib, barcha jarayonlar va jarayonlar vaqti-vaqti bilan takrorlanishi mumkin va bu takrorlashlarning chastotasi boshqaruv tizimida belgilanadi.
Servoga ulanish
Oddiy servomotorni tashkil etuvchi asosiy detallar rotor va statordir. Kommutatsiya uchun vilkalar va terminal qutilari ko'rinishida maxsus komponentlar o'rnatiladi. Jarayonlarni boshqarish, nazorat qilish va tuzatish yaxshi saqlangan kritik tugun yordamida amalga oshiriladi. Bu vimikannya servo haydovchi vikoristovuetsya okrema tizimini yaxshilash uchun. Barcha tafsilotlar zal binosida joylashgan.
Deyarli barcha servo drayverlarda joylashuv, susilla yoki o'rash tezligi kabi parametrlarni ishlaydigan va tekshiradigan sensor mavjud. Xizmat bloki yordami uchun robotik biriktirish vaqtida kerakli parametrlarning avtomatik rejimi joriy etilgan. Keyingi parametrni tanlash soat oralig'ida sensorda topilishi kerak bo'lgan signallar mavjudligida tanlanadi.
Servo haydovchi va katta elektr motor o'rtasidagi farq milni aniq belgilangan holatda, xuddi darajalarda bo'lgani kabi o'rnatish imkoniyati bilan belgilanadi. Boshqaruv bloki tomonidan qo'llab-quvvatlanadigan boshqa parametrlar kabi pozitsiya o'rnatiladi.
Ish printsipi elektr motorining yordami uchun mexanik ravishda aylantirilgan elektr energiyasiga asoslangan. Drayv sifatida vites qutisi o'ralgan bo'lib, bu sizga kerakli qiymatga o'rash tezligini kamaytirish imkonini beradi. Men omborga tishli milni quraman, u momentni o'zgartiradi va uzatadi.
Servo qanday ishlash kerak
Servo qo'zg'aysan bilan viteslar bilan bog'langan vites qutisining chiqish milining o'rashi ushbu elektr motor tishlarining boshlanishiga yo'l bilan bog'langan. Reduktorning o'zi o'rash sonini tartibga solishi kerak. Tashqi devorni davolash uchun zarur bo'lgan mexanizmlar va qo'shimcha binolar bilan ulash mumkin. Milning holati burilish rishtasining qo'shimcha sensori, elektr signalining burilish o'zgarishi va butun qo'shimchaning ishlash printsipi bilan boshqariladi.

Ushbu sensor enkoder yoki potansiyometr sifatida ham tanilgan. Yuguruvchini aylantirganingizda, yoga opiri o'zgaradi. Kodlovchining burilish burchagi bilan to'g'ridan-to'g'ri proportsional kuzda joylashgan tayanchni o'zgartiring. Daniya ish printsipi mexanizmlarni to'g'ri holatda o'rnatish va tuzatish imkonini beradi.
Dodatkovo teri servomotorida tashqi signallarni qayta ishlaydigan elektron plata bo'lishi mumkin, bu potansiyometrga o'xshaydi. Dalí vykonuêtsya porivnyannya parametrív, har qanday zadíisnyuêtsya natijalari uchun chizupinkka elektr motorini ishga tushirish. Keyinchalik, elektron to'lov yordami uchun salbiy qaytish havolasi qo'shiladi.

Siz uchta o'tkazgichning yordami uchun servomotorni ulashingiz mumkin. Ulardan ikkitasi elektr motoriga beriladi, uchinchisi esa nazorat signallarining o'tishi uchun xizmat qiladi, bu esa milni to'g'ri holatga keltiradi.
Yumshoq tezlashtirish yoki bunday silliq galvanizatsiya yordami uchun elektr motorida dunyodan tashqari dinamik haydovchiga ustunlik berish mumkin. Kimlar uchun katlamali mikrokontrollerlar o'rnatilgan bo'lib, ular ishchi elementni aniqroq boshqarish va joylashishni nazorat qilishni ta'minlaydi. Bir dumba kabi, siz kompyuterning qattiq diskini yo'naltirishingiz mumkin, bu holda boshlar qo'shimcha aniq haydovchi bilan kerakli holatda o'rnatiladi.
Servo motorni boshqarish
Asosiy sabab shundaki, servomotor G-kod deb ataladigan tizim bilan bir xil tarzda ishlay oladigan normal ishlashi kerak. Qi kodi ê maxsus dasturni boshqarish, xatcho'p qo'yish uchun terish buyruqlari.
Xuddi CNC - raqamli dastur boshqaruvini qo'lga kiritish kabi, shu tarzda servolar bir-biri bilan o'zaro ta'sir qiladi. Binoning badbo'y hidining kirish kuchlanish darajasiga qadar Vidpovidno, o'rash o'rashida yoki elektr motorining langarida kuchlanish qiymatini o'zgartiring.

Servomotor va tizimning vositachi nazoratisiz bir oy ichida amalga oshiriladi - boshqaruv bloki. Agar sizga X koordinata o'qi bo'ylab qo'shiq chizig'ini o'tkazish buyrug'i kerak bo'lsa, raqamli analogda sing qiymatining kuchlanishini o'zgartiring, koordinata o'qining jonli haydovchisini qanday topish mumkin. Servomotorda enkoderga va asosiy mexanizmning boshqaruv organiga bog'langan ishlaydigan vintni o'rash harakati mavjud.
Impulslar enkoderga tebranadi, ular servoni boshqaradigan blok tomonidan kuchaytiriladi. Dastur stantsiyaga o'rnatilgan kodlovchidan ma'lum miqdordagi signallarga ega bo'lib, u urish mexanizmidan o'tishi mumkin. Kerakli soatda analog o'zgartirgich belgilangan miqdordagi impulslarni olib tashlab, katta chiqish kuchlanishini qo'lladi, natijada servomotor g'ichirladi. Shunday qilib, impulslar oqimi ostida bosim o'zgaradi va butun tizimning ishi o'zgaradi.
Xususiyatlarga qarang
Servo motorlar turli xil versiyalarda mavjud bo'lib, ularni turli sohalarda ishlatishga imkon beradi. Asosiy konstruktsiyalar doimiy va o'zgaruvchan strum ko'rinishidagi ish uchun kollektor va belgilarga bo'linadi.
Bundan tashqari, teri servomotor sinxron yoki asenkron bo'lishi mumkin. Sinxron xo'jalik inshootlari o'rashning yuqori aniqlikdagi tezligini o'rnatishi mumkin, shuningdek, tez kesish va aylantirish mumkin. Qi o'rashning nominal qiymatini yig'ish uchun shvedni olib keling. Asinxron vikonanndagi servo drayvlar nazoratchi tomonidan boshqariladi, agar uning chastotasi yordamchi inverter tomonidan o'zgartirilsa, oqim parametrlarini o'zgartiring. Eng yuqori aniqlikdagi hid eng kichik o'ramlar uchun berilgan tezlikni ko'rsatadi.

Printsipial sxema va dizaynga ko'ra, servo drayvlar elektromexanik va elektromexanik bo'lishi mumkin. Vites qutisi va motorni o'z ichiga olgan birinchi variant past tezlik kodiga bo'ysunadi. Boshqa holatda, silindrdagi piston rahunok tomonidan qattiq puflanadi.
Teri servo haydovchi quyidagi parametrlar bilan tavsiflanadi:
- Cool moment yoki zusilla, mil ustida nima sodir bo'ladi. Robot servoning eng muhim ko'rsatkichi hisoblanadi. Kuchlanishning teri qiymati uchun muhim moment bor, nima burish kerak, pasportda nima ko'rsatilgan.
- Burilish tezligi. Ushbu parametr chiqish milining o'rnini 600 ga o'zgartirish uchun zarur bo'lgan yagona vaqt davridir.
- Tashqi milni aylantirishi mumkin bo'lgan maksimal kesish. Eng tez-tez uchraydigan qiymat 180 yoki 3600 bo'ladi.
- Barcha servolar raqamli va analogga bo'linadi. Servo boshqaruvning keyingi ko'rinishi.
- Servomotorlarning hayoti. Ko'pgina vikorist modellari 4,8 dan 7,2 V gacha kuchlanishga ega. Zhivlennya, deb boshqarish zdiisnyuetsya uch hidoyat yordam uchun.
- Doimiy o'rashning servodrivida modernizatsiya qilish imkoniyati.
- Reduktor uchun materiallar har xil bo'lishi mumkin. Tishli qutilar metall, uglerod, plastmassa yoki kombinatsiyalangan omborlardan tayyorlanadi. Ulardan teri o'zining afzalliklari va kamchiliklariga ega bo'lishi mumkin. Masalan, plastik qismlar zarba zo'riqishida yomon tebranadi, ammo ular sinovdan o'tkazish jarayonida eskiradi. Metall tishli, navpak, tez eskiradi, keyin badbo'y hidi dinamik bema'nilikka yuqori chidamli bo'lishi mumkin.
Servomotorlarning afzalliklari va kamchiliklari
Zavdyaki o'lchamlari va kengaytmalarini birlashtirish oson va har qanday dizaynda o'rnatilishi oson. badbo'y hidi bezvydmovny va nadyyny, ulardan teri, buklama va vydpovídalnyh dalyanka ularning faoliyatida katta ahamiyatga ega bo'lishi mumkin, amalda shovqinsiz. Navit past tezlikda siz aniqlik va silliq harakatga erishishingiz mumkin. Servo boshqariladigan teri sokin chi ynshih vazifalari taqdirda, hodimlar tomonidan sozlanishi mumkin.
Nedoliki vydnachayutsya sevny skladnosty qachon nalashtuvannyah deb poryvnyano vysoka vartyst sifatida.